Comments 7
Спасибо за познавательную статью. У меня следующие вопросы: На сколько точно устанавливается длительность сигнала и не плавает ли она (при наличии других процессов)? На сколько быстро можно менять длительность импульса ШИМ?
Пожалуйста!
Скажем так, длительность импульса и период стремятся плавать. Но это заметно только на частотах в несколько кГц. У меня получалось разогнать до 22 кГц. Но на такой частоте уже сложно подавать управляющие импульсы без задержек.
Длительность импульса или периода меняется очень быстро, задержка меньше 1 мс. С такими параметрами вполне можно летать.
Скажите какой сценарий вам интересен — потестирую. Я еще в самом начале пути и не представляю пока как буду отлаживать это дело ).
Скажем так, длительность импульса и период стремятся плавать. Но это заметно только на частотах в несколько кГц. У меня получалось разогнать до 22 кГц. Но на такой частоте уже сложно подавать управляющие импульсы без задержек.
Длительность импульса или периода меняется очень быстро, задержка меньше 1 мс. С такими параметрами вполне можно летать.
Скажите какой сценарий вам интересен — потестирую. Я еще в самом начале пути и не представляю пока как буду отлаживать это дело ).
UPD: На сколько я понял, вам интересно использовать ШИМ для управления яркостью. Это вполне реально. Devboard который мне прислали китайцы имеет светодиоды параллельно с GPIO. Я поначалу игрался и смотрел как меняется яркость. Камера фиксирует легкое моргание светодиода, не раздражает.
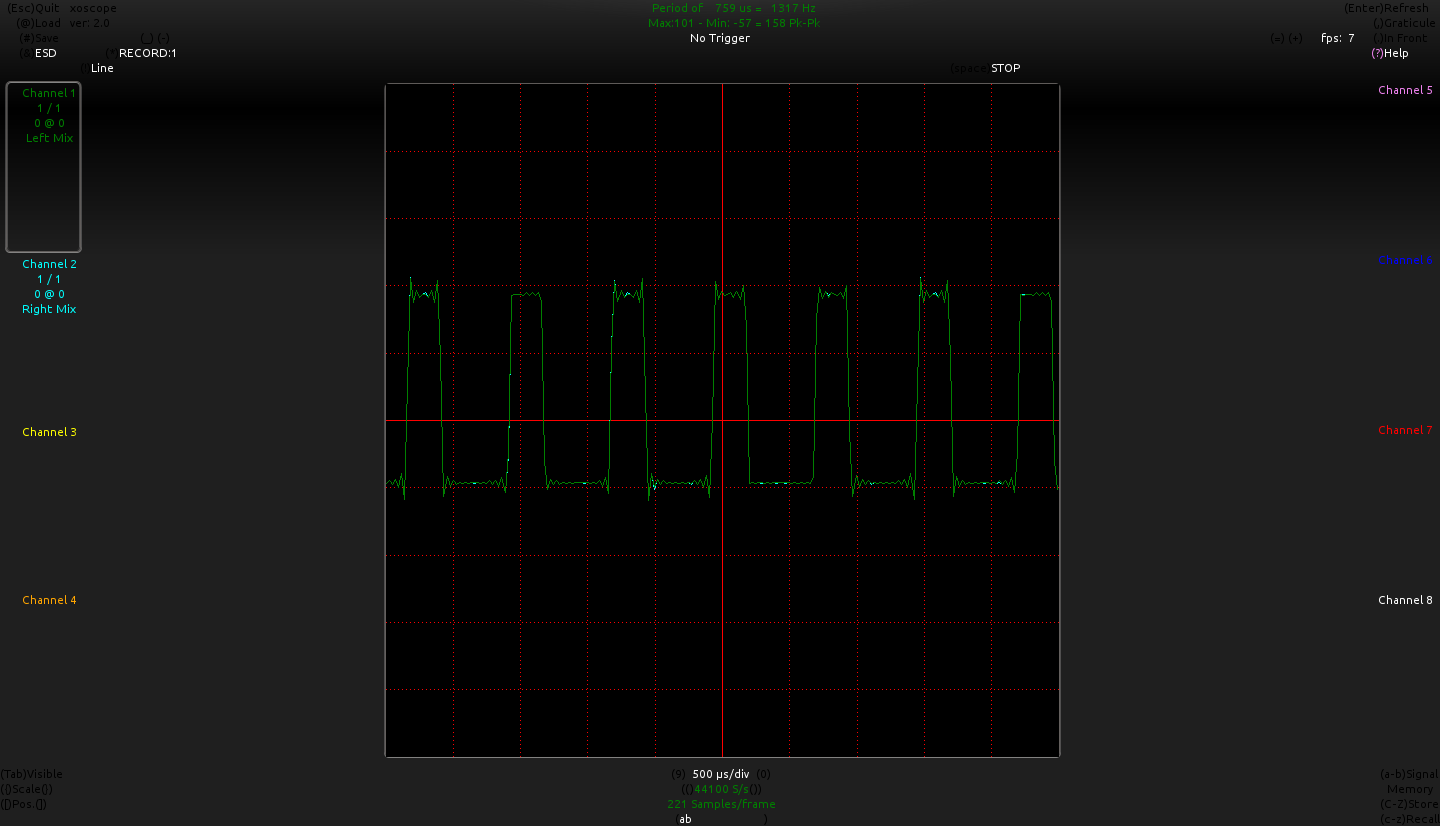
Вот так выглядит на 130 кГц.
Погрешность около 9 нс.
Но это xoscope через аудиокарту. Может чуток врать вполне и он.
Погрешность около 9 нс.
Но это xoscope через аудиокарту. Может чуток врать вполне и он.
Очень не плохой результат! Если Вы планируете использовать OpenWRT для полетов я бы посоветовал проверить как сильно плавает сигнал при загрузке процессора (например с запущенным модулем mjpg-streamer).
Sign up to leave a comment.
Управляем сервоприводами из OpenWRT без Arduino