Я люблю делать простые как топор вещи, но одновременно жутко полезные, например, как прошлая статья 9 летней давности — Установка Ubuntu Linux с винчестера. Скрипт, вот и сейчас настал час для такой деятельности.
Под катом вы найдете подробнейшую инструкцию как на основе Arduino и дешевых и доступных средств автоматизировать подачу чистой свежей воды в кофемашину, а также организовать отвод жидкости из поддона кофемашины, на которой не предусмотрено подключение к внешним коммуникациям.
Предыстория и мотивация
История такова, что в маленькой, но очень гордой фирме по производству «громадных квадрокоптеров» SKYF купили кофемашину, ближайшие водопроводные и канализационные коммуникации были в метрах 100 от нее. В процессе эксплуатации оказалось, что коллектив из 30 человек заполнял поддон для капель за ~10 кружек кофе, а потом нужно было идти через три двери до ближайшего санузла, балансируя с заполненным водой поддоном, как на Сабантуе с яйцом в ложке, дабы не пролить, ни капли на коверистый пол, ни, тем более, на штаны. Куда меньшую проблему доставляло наполнение резервуара чистой воды, т.к. диспенсер был в полуметре от кофемашины и нужно было лишь 1-2 минуты постоять в руках с пластиковым резервуаром для чистой воды. Но я твердо решил, что «хватит это терпеть» (с) и вооружившись завалявшейся у меня платкой Arduino Uno, решил автоматизировать процесс наполнения бачка и слива отработанной жидкости.
Предварительно изучил вопрос рентабельности сей идеи автоматизации, оказалось что различие в цене приобретенной кофемашины и кофемашины с возможностью подключения к канализации составляет 2 раза минимум! Приведу пример кофемашин в ценах на начало 2018 года:
— Купленная кофемашина ~60 000 рублей;
— Затраты на дополнение функции подключения к «внешним коммуникациям» ~ 3000 руб;
— Кофемашина с возможностью подключения к водопроводу и канализации — ~от 110 000 до ∞ руб.
Цены просто небо и земля. Определенно есть смысл автоматизировать купленную кофемашину.
Основной раздел
Цели:
— увеличить интервал слива жидкости с поддона с раз в 1 час на раз в сутки минимум;
— реализовать удобный способ транспортировки отработанной жидкости до канализационных коммуникаций;
— забыть что такое снимать емкость чистой воды и стоять 1-2 минуты около диспенсера для заполнения емкости.
Способы решения задачи:
— сделать человекоподобного робота или нанять роботоподобного человека, который занимался этими проблемами вручную;
— сделать автоматическую систему, которая сократит частоту ручного труда пользователей кофемашины.
Очевидно, что первый способ очень долг и интересен, оставлю это на будущее. На досуге можно сделать робота, доставляющий приготовленный кофе от кофемашины работнику и, который занимался бы автоматизацией оставшегося ручного труда. Второй способ с секретаршей скучен, банален, так поступали испокон веков, это не наш метод. Выбираем третий способ, он оптимален по соотношению трудоемкость/цена.
Решаем поставленные цели в соответствии с выбранным способом.
Наш пациент выглядит таким образом:

Слева у кофемашины съемный бачок для чистой воды, в нижней части выдвижной поддон для капель объемом ~400 мл.
Задача решается организационно и с помощью элементов системы автоматического управления:
1) берем две бутылки 19 литров, которые всегда под рукой в офисе, одна будет для чистой воды, другая для отработанной;
2) в случае снижения уровня в бачке кофемашины до минимума подаем из бутыли чистой воды при помощи насоса воду до отметки максимум;
3) соединяем ПВХ трубкой поддон с внешним резервуаром и контроллируем уровень в нем, саму бутыль, дабы не портить аппетит цветом стоков, закрываем чехлом, которые предлагают многие службы доставки воды.
Например, вот такой чехол:

Если у вас очень близко водопровод и канализация, но в кофемашине не предусмотрена возможность подключения к водопроводу и канализации, то эта статья тоже вам подойдет. Вместо насоса у вас будет соленоидный клапан, которым тоже можно управлять с помощью 12 Вольт, клапан соединяется, например, с фильтром воды (который обычно идет с краном чистой воды). А насчет слива — трубку в канализацию, датчик контроля уровня в резервуаре слива надо будет убрать из программы ниже.
Выбираем средства автоматизации
Берем Arduino Uno и начинаем автоматизировать. Нам потребуется:
— Датчик уровня воды в резервуаре кофемашины;
— Насос подачи воды из бутыли в резервуар;
— Датчик уровня воды в резервуаре стоков.
Логика проста:
ЕСЛИ уровень в резервуаре кофемашины ниже минимума -> включить насос;
ЕСЛИ уровень в резервуаре кофемашины выше максимума -> остановить насос;
ЕСЛИ уровень в резервуаре стоков выше максимума — вопить.
Казалось бы логика проста, но при реализации оказалось что не все так просто, все подробности в разделе программирования.
Также потребуется блок питания 220В->12Вольт им запитаем, и Arduino, и насос. Управлять насосом будем с помощью реле ардуино (подойдет любой модуль реле с управляющим напряжением 5 Вольт и не более 20мА, вы можете его сделать сами, а можете просто купить реле от Ардуино).
Для общения с человеческим видом ардуинке прикупим пьезопищалку, дабы оповещать о неисправностях, и кнопку, через которую будем считывать хотелки и поведение человека.
Также нам потребуется корпус для складывания всего этого хозяйства, я использовал 3д модель для ардуино уно и прикрепил реле с пищалкой к самому корпусу ардуино. Тут уж кто на что горазд.
— Датчик уровня воды в резервуаре кофемашины;
— Насос подачи воды из бутыли в резервуар;
— Датчик уровня воды в резервуаре стоков.
Логика проста:
ЕСЛИ уровень в резервуаре кофемашины ниже минимума -> включить насос;
ЕСЛИ уровень в резервуаре кофемашины выше максимума -> остановить насос;
ЕСЛИ уровень в резервуаре стоков выше максимума — вопить.
Казалось бы логика проста, но при реализации оказалось что не все так просто, все подробности в разделе программирования.
Выбираем насос
Требования к насосу:
1) должен проходить в горлышко обычной офисной бутылки воды 19 литров, диаметр горлышка 53 мм;
2) должен иметь напряжение питания не более 12 Вольт, дабы согласовать с питанием Arduino и не иметь опасности поражения электрическим током;
3) желательно должен быть погружным в бутыль, чтобы не захламлять пространство вокруг кофемашины и не попадаться на глаза;
4) должен иметь возможность создать давление для подъема воды на 1.5 метра.
Этим критериям удовлетворили следующие насосы:
— погружной насос AMP-X157 от «Амперка» на 5-12 Вольт;

— погружной насос BI0002156 от китайцев на 6-15 Вольт.

Сначала выбрал первый вариант, просто потому что он продавался в моем городе, некогда ждать месяц китайцев, кофе без забот хочется пить прямо здесь и сейчас. Но при эксплуатации выяснилось из-за выступающего штуцера не пролезает через горлышко в другую бутылку. Потом купил китайский насос, он подошел идеально.
Характеристики китайского насоса (полужирным шрифтом выделены важные для нас параметры):
Рабочее напряжение 6-15 В
Номинальный ток: 1.2A
Максимальный расход: 600л/ч
Размеры: прибл. 10.8 х 4 см (В х Ш)
Идеально. Берем. На этот насос в ближайшем строительном магазине прикупил прозрачную ПВХ трубку с внутренним диаметром 12. На первый насос, которая «амперка» шла трубка диаметром 8 и 10 см (внутренний, внешний) длиной 1 м из нее был сделан слив, так что придется купить 2 трубки, кто хочет просто пройтись по инструкции.
1) должен проходить в горлышко обычной офисной бутылки воды 19 литров, диаметр горлышка 53 мм;
2) должен иметь напряжение питания не более 12 Вольт, дабы согласовать с питанием Arduino и не иметь опасности поражения электрическим током;
3) желательно должен быть погружным в бутыль, чтобы не захламлять пространство вокруг кофемашины и не попадаться на глаза;
4) должен иметь возможность создать давление для подъема воды на 1.5 метра.
Этим критериям удовлетворили следующие насосы:
— погружной насос AMP-X157 от «Амперка» на 5-12 Вольт;
— погружной насос BI0002156 от китайцев на 6-15 Вольт.
Сначала выбрал первый вариант, просто потому что он продавался в моем городе, некогда ждать месяц китайцев, кофе без забот хочется пить прямо здесь и сейчас. Но при эксплуатации выяснилось из-за выступающего штуцера не пролезает через горлышко в другую бутылку. Потом купил китайский насос, он подошел идеально.
Характеристики китайского насоса (полужирным шрифтом выделены важные для нас параметры):
Рабочее напряжение 6-15 В
Номинальный ток: 1.2A
Максимальный расход: 600л/ч
Размеры: прибл. 10.8 х 4 см (В х Ш)
Идеально. Берем. На этот насос в ближайшем строительном магазине прикупил прозрачную ПВХ трубку с внутренним диаметром 12. На первый насос, которая «амперка» шла трубка диаметром 8 и 10 см (внутренний, внешний) длиной 1 м из нее был сделан слив, так что придется купить 2 трубки, кто хочет просто пройтись по инструкции.
Выбираем датчики уровня
Требования к датчику уровня:
1) должен давать информацию о низком и высоком уровне в бачке воды;
2) по возможности не должен требовать вмешательства в конструкцию бачка;
3) должен быть компактным;
4) должен быть эстетичным и не выделяться;
5) должен запитываться безопасным и совместимым с ардуино питанием 5-12 Вольт;
6) должен быть доступным в городе (мое требование здесь и сейчас);
7) должен работать с пресной водой;
Что предлагает нам рынок:
1) Датчик уровня специально для ардуино

Удовлетворяет пунктам: 2, 3, 5, 6.
Не удовлетворяет пунктам: 1, 4. По мне он слишком выделяется и не эстетичный, к тому же его длина не позволит измерять всю высоту уровня (высота бачка около 22 см, данный датчик 6.2 см)
2) Поплавковый уровень

Удовлетворяет пунктам: 1 (два датчика), 3, 5, 6.
Не удовлетворяет пунктам: 2, 4. Нужно сверлить бак, выделяется, но его приметим, он нам еще пригодится.
Также есть в виде штанги, тоже не подходят — сложно подобрать нужного размера
3) Инфракрасный датчик уровня (оптопара)

Удовлетворяет пунктам: 1 (два датчика), 3, 4, 5, 6.
Не удовлетворяет пунктам: 2. Нужно сверлить бак.
4) Ультразвуковой датчик расстояния HC-SR04

Удовлетворяет всем пунктам. У бачка есть крышка, к которой можно прикрепить данный датчик и измерять расстояние до поверхности, благодаря что звук от воды отражается обратно на 99% («эхо гуляет по Яхреньгскому озеру» (с) язь), то этот датчик подходит идеально: совместим с ардуино, безопасное напряжение, ничего сверлить не надо, будет скрыт под крышкой (в теории), в магазинах навалом, измеряет уровень полностью от дна до полного.
Работает сам датчик следующим образом: у датчика есть излучатель и приемник, излучатель посылает звуковую волну, а приемник слушает когда придет эхо, по всем известным формулам физики и времени возврата эха можно вычислить расстояние до отраженной поверхности. Берем.
1) должен давать информацию о низком и высоком уровне в бачке воды;
2) по возможности не должен требовать вмешательства в конструкцию бачка;
3) должен быть компактным;
4) должен быть эстетичным и не выделяться;
5) должен запитываться безопасным и совместимым с ардуино питанием 5-12 Вольт;
6) должен быть доступным в городе (мое требование здесь и сейчас);
7) должен работать с пресной водой;
Что предлагает нам рынок:
1) Датчик уровня специально для ардуино
Удовлетворяет пунктам: 2, 3, 5, 6.
Не удовлетворяет пунктам: 1, 4. По мне он слишком выделяется и не эстетичный, к тому же его длина не позволит измерять всю высоту уровня (высота бачка около 22 см, данный датчик 6.2 см)
2) Поплавковый уровень
Удовлетворяет пунктам: 1 (два датчика), 3, 5, 6.
Не удовлетворяет пунктам: 2, 4. Нужно сверлить бак, выделяется, но его приметим, он нам еще пригодится.
Также есть в виде штанги, тоже не подходят — сложно подобрать нужного размера
3) Инфракрасный датчик уровня (оптопара)
Удовлетворяет пунктам: 1 (два датчика), 3, 4, 5, 6.
Не удовлетворяет пунктам: 2. Нужно сверлить бак.
4) Ультразвуковой датчик расстояния HC-SR04
Удовлетворяет всем пунктам. У бачка есть крышка, к которой можно прикрепить данный датчик и измерять расстояние до поверхности, благодаря что звук от воды отражается обратно на 99% («эхо гуляет по Яхреньгскому озеру» (с) язь), то этот датчик подходит идеально: совместим с ардуино, безопасное напряжение, ничего сверлить не надо, будет скрыт под крышкой (в теории), в магазинах навалом, измеряет уровень полностью от дна до полного.
Работает сам датчик следующим образом: у датчика есть излучатель и приемник, излучатель посылает звуковую волну, а приемник слушает когда придет эхо, по всем известным формулам физики и времени возврата эха можно вычислить расстояние до отраженной поверхности. Берем.
Также потребуется блок питания 220В->12Вольт им запитаем, и Arduino, и насос. Управлять насосом будем с помощью реле ардуино (подойдет любой модуль реле с управляющим напряжением 5 Вольт и не более 20мА, вы можете его сделать сами, а можете просто купить реле от Ардуино).
Для общения с человеческим видом ардуинке прикупим пьезопищалку, дабы оповещать о неисправностях, и кнопку, через которую будем считывать хотелки и поведение человека.
Также нам потребуется корпус для складывания всего этого хозяйства, я использовал 3д модель для ардуино уно и прикрепил реле с пищалкой к самому корпусу ардуино. Тут уж кто на что горазд.
Собираем, паяем, сверлим, клеим
Итого что нам потребуется (какое то «пока все дома»...):
1) 2 бутылки 19 литров;
2) Arduino Uno;
3) Блок питания 12 Вольт;
4) Насос погружной BI0002156;
5) Ультразвуковой датчик расстояния HC-SR04 (буду называть сонаром);
6) Поплавковый уровень прямой;
7) Кнопка для взаимодействия с человеком;
8) Реле на 5 Вольт;
9) Пьезопищалка;
10) Корпус;
11) До кучи перемычек папа-мама, мама-мама;
Из инструментов: изолента, нож, герметик, сверла, дрель, паяльник со всеми причитающимся.
Общая схема изображена ниже.
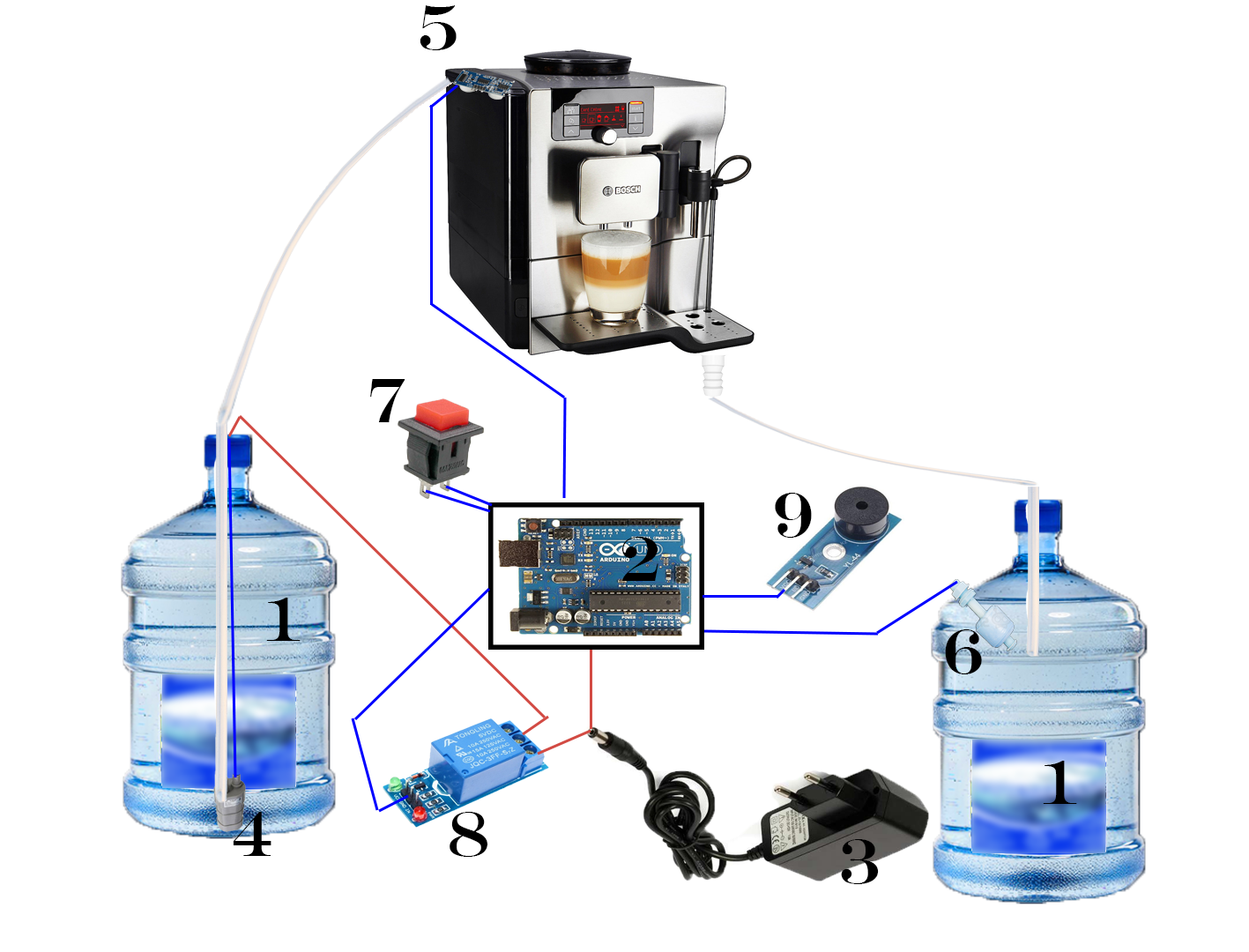
Собираем по «принципиальной» схеме ниже всю конструкцию. GND от каждого элемента тянем на любой GND выход Arduino, та же история с +5V. Следование номеру каналов даст вам преимущество не переделывать номера пинов в программе, которая будет ниже.
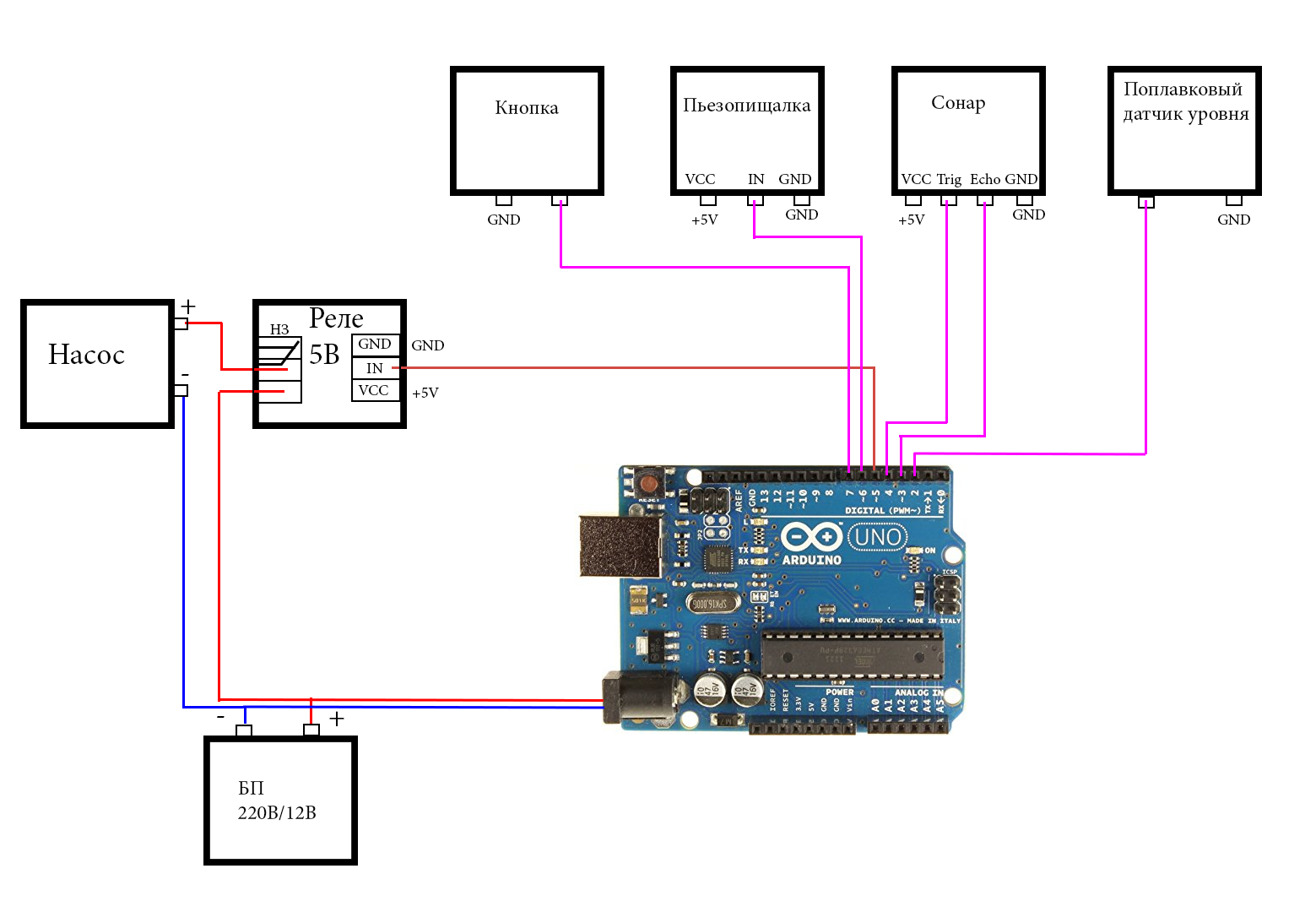
Хотелось бы отметить:
1. Я решал проблему с нехваткой разъемов GND и 5В тем, что припаял проводку к этим выводам и нужные мне датчики запитал от клемников WAGA, куда можно 5 проводов подцепить.
2. Сонар удобно крепится резинками к крышке бачка. Постарайтесь добиться перпендикуляторности излучателя к поверхности воды.
3. На бачек с помощью канцелярского зажима крепится шланг чтобы не выскочил из бачка.
4. Отвод капель из поддона я сделал через распечатанный на 3D принтере штуцер. В низшей точке сливного поддона кофемашины сверлим отверстие 9 мм под него, вставляем его туда и герметизируем соединение. Модель для штуцера под шланг диаметров 8/10 мм ниже по ссылке.
1) 2 бутылки 19 литров;
2) Arduino Uno;
3) Блок питания 12 Вольт;
4) Насос погружной BI0002156;
5) Ультразвуковой датчик расстояния HC-SR04 (буду называть сонаром);
6) Поплавковый уровень прямой;
7) Кнопка для взаимодействия с человеком;
8) Реле на 5 Вольт;
9) Пьезопищалка;
10) Корпус;
11) До кучи перемычек папа-мама, мама-мама;
Из инструментов: изолента, нож, герметик, сверла, дрель, паяльник со всеми причитающимся.
Общая схема изображена ниже.
Собираем по «принципиальной» схеме ниже всю конструкцию. GND от каждого элемента тянем на любой GND выход Arduino, та же история с +5V. Следование номеру каналов даст вам преимущество не переделывать номера пинов в программе, которая будет ниже.
Хотелось бы отметить:
1. Я решал проблему с нехваткой разъемов GND и 5В тем, что припаял проводку к этим выводам и нужные мне датчики запитал от клемников WAGA, куда можно 5 проводов подцепить.
2. Сонар удобно крепится резинками к крышке бачка. Постарайтесь добиться перпендикуляторности излучателя к поверхности воды.
3. На бачек с помощью канцелярского зажима крепится шланг чтобы не выскочил из бачка.
4. Отвод капель из поддона я сделал через распечатанный на 3D принтере штуцер. В низшей точке сливного поддона кофемашины сверлим отверстие 9 мм под него, вставляем его туда и герметизируем соединение. Модель для штуцера под шланг диаметров 8/10 мм ниже по ссылке.
Штуцер / Choke by slimercorp on Sketchfab
Программируем
Спасибо Chupakabra303 за статью на GeekTimes! Без таймеров, детекторов фронтов сигнала не справился бы с программированием. Честно говоря, очень тяжело работать с Arduino, который изначально не заточен под псевдопараллельность задач как настоящие ПЛК.
Измерять уровень будем раз в 0.5 с, это необходимо чтобы эхо от прошлого измерения затихло в почти замкнутом пространстве бачка с водой, если чаще измерять — ничего не толкового не выйдет.
Общается Arduino следующим способом. При ошибке он пищит N раз с паузой 10 секунд, N — номер ошибки.
N писков:
1 – переполнение бутыли для слива или обрыв в линии связи датчика в этой бутыли с контроллером.
2 – проблема с ультразвуковым датчиком уровня (сонар), он либо утоплен, либо отошел какой-либо из проводов.
3 – не подается вода при попытке ее налить. Проблемы: нет воды в бутылке чистой воды, насос, реле, питание, провода.
Чтобы квитировать ошибку (жест «я понял»), человек жмет на кнопку 1 раз, Arduino высоко пищит в течении 1 секунды, говорит что принято, я молчу. Человек в это время принимает меры для исправления проблемы, Arduino в этом режиме пищит 1 раз в 1 минуту, напоминая о себе. После исправления проблемы человек жмет 2 раза кнопку в течении 3 секунд (жест «проверь систему»), далее Arduino либо снова выдаст ошибку писком, либо 1 раз высоко пропищит, сказав что все хорошо, «работаю дальше».
Помимо этого реализовано:
— debug информация по COM порту, для отладки системы, например, отлаживать положение сонара, чтобы он выдавал нужный уровень;
— писк пищалкой без останова исполнения программы (соответственно с контролем нажатий кнопки).
Исходный код:
Измерять уровень будем раз в 0.5 с, это необходимо чтобы эхо от прошлого измерения затихло в почти замкнутом пространстве бачка с водой, если чаще измерять — ничего не толкового не выйдет.
Общается Arduino следующим способом. При ошибке он пищит N раз с паузой 10 секунд, N — номер ошибки.
N писков:
1 – переполнение бутыли для слива или обрыв в линии связи датчика в этой бутыли с контроллером.
2 – проблема с ультразвуковым датчиком уровня (сонар), он либо утоплен, либо отошел какой-либо из проводов.
3 – не подается вода при попытке ее налить. Проблемы: нет воды в бутылке чистой воды, насос, реле, питание, провода.
Чтобы квитировать ошибку (жест «я понял»), человек жмет на кнопку 1 раз, Arduino высоко пищит в течении 1 секунды, говорит что принято, я молчу. Человек в это время принимает меры для исправления проблемы, Arduino в этом режиме пищит 1 раз в 1 минуту, напоминая о себе. После исправления проблемы человек жмет 2 раза кнопку в течении 3 секунд (жест «проверь систему»), далее Arduino либо снова выдаст ошибку писком, либо 1 раз высоко пропищит, сказав что все хорошо, «работаю дальше».
Помимо этого реализовано:
— debug информация по COM порту, для отладки системы, например, отлаживать положение сонара, чтобы он выдавал нужный уровень;
— писк пищалкой без останова исполнения программы (соответственно с контролем нажатий кнопки).
Исходный код:
#include <Ultrasonic.h> #include <plcStandardLib_1.h> //============================================================= //Формальное объявление необходимых триггеров и переменных R_TRIG R_TRIG1; R_TRIG R_TRIG2; R_TRIG R_TRIG3; R_TRIG R_TRIG4; F_TRIG F_TRIG1; bool TrashFull; //Высокий уровень в отходах bool igotit; //Обратная связь от человека, что он ошибку понял bool check_pls; //Признак запроса на проверку состояния системы bool PumpUp; // Начать качать воду в резервуар чистой воды bool NoFlow; //Признак отсутствия потока воды от насоса bool Pressed; //Признак того что кнопка нажата bool beep_pause_superlong; //Признак супер долгой паузы писка bool beep_pause_superlong_end; // Признак окончания супер долгой паузы писка bool beep_pause_long; //Признак долгой паузы писка bool beep_pause_long_end; //Признак окончания долгой паузы писка bool beep_pause_short; //Признак короткой паузы писка bool beep_pause_short_end; //Признак окончания паузы писка bool beep_on; //Признак присутствия писка на выходе пьезопищалки bool beep_duration_end; //признак окончания писка bool beep_granted; //Признак разрешения на писк bool Pressed_now; //кнопка нажата только что bool UnPressed_now; //кнопка отжата только что bool time_end; //время контрольное кончилось bool reset; // сброс контроля по уровню int mode; //режим программы int error; //вид ошибки int n_pressed; //количество нажатий вовремя интервала 2 секунды int k_beep; //количество писков за контрольный интервал float us_level_raw; //расстояние от датчика до воды, сырое значение с датчика float us_level_filt; ////расстояние от датчика до воды, сырое значение с датчика фильтрованный сигнал float level; //уровень в баке float level0; //уровень в баке в момент включения насоса long t0; //Момент времени при котором начался контроль за нажатием кнопки long time_to_destroy; //Подсчет времени до разрушения контроля за количеством нажатий кнопок в интервале 2 секунды //============================================================= //============================================================= //Настройка железа Ultrasonic ultrasonic(4, 3); // 3 - Echo, 4 - Trig const int LevelTrashPin = 2; //Вход для дискретного датчика в сливе const int RelayPin = 5; // Выход управления реле const int BeepPin = 6; // Выход пищалки const int ButtonPin = 7; //Вход кнопки //============================================================= //============================================================= //Настройка таймеров //мусорка антидребезг на аварию TON TON1(50); // таймер на 50мс, инициализация //кнопка антидребезг на зажатие и отжатие TON TON2(50); // таймер на 50мс, инициализация кнопка TOF TOF1(50); // таймер на 50мс, инициализация TON TON3(10000); // таймер на 10 секунд, инициализация КОНТРОЛЬНОЕ ВРЕМЯ ПРОВЕРКИ РАБОТЫ НАСОСА TON TON4(1500); // таймер на 1.5с, инициализация ДЛИТЕЛЬНОСТЬ ПИСКА TON TON5(1500); // таймер на 1.5с, инициализация ДЛИТЕЛЬНОСТЬ КОРОТКОЙ ПАУЗЫ TON TON6(10000); // таймер на 10 секунд, инициализация ДЛИТЕЛЬНОСТЬ ДЛИННОЙ ПАУЗЫ TON TON7(60000); // таймер на 1 минуту, инициализация ДЛИТЕЛЬНОСТЬ СУПЕРДЛИННОЙ ПАУЗЫ TON TON8(1000); // таймер на 1 секунду, инициализация ПЕРИОД DEBUG INFO TON TON9(500); // таймер на 0.5 сек, инициализация ПЕРИОД измерений уровня //============================================================= //============================================================= //Настройка констант, параметров системы const int f_mode=500; //Частота в Гц при подтверждении принятия желания человека const int f_error=100; //Частота в Гц для ошибок const int t_nc=5000; //Время отсутствия контроля за ошибками после старта ардуино в мс (time_no_control) const int dLevel_cp=3; //Уровень должен подняться на столько см за контрольный период (cp - control period) const int button_cp=3000; //Контрольный период нажатия кнопки в мс const float w_level=0.3; //Вес фильтра сонара const float us_level_filt_fault=0.1; //Значение уровня при котором и ниже считаем датчик в аварии const float HeightTank = 20; //Высота резервуара в см const float HighLevel = 15; //Уровень высокий в см const float LowLevel = 3; //Уровень низкий в см const bool debug_on=true; //включить ли отладку по Serial //============================================================= void setup() { Serial.begin(9600); // Это команда для Ардуино : задействовать COM порт для передачи данных. pinMode(LevelTrashPin, INPUT_PULLUP); pinMode(RelayPin, OUTPUT); pinMode(BeepPin, OUTPUT); pinMode(ButtonPin,INPUT_PULLUP); igotit=false; check_pls=false; NoFlow=false; beep_pause_long=false; beep_pause_short=false; beep_on=false; beep_pause_superlong=false; beep_pause_long=false; beep_pause_short=false; beep_on=false; k_beep=0; t0=millis(); mode=1; tone(BeepPin,f_mode,1000); //пищим что все ок, инициализация завершена } void loop() { //============================================================= //Секция считывания данных //Полный - высокий уровень, Пустой - низкий уровень, Обрыв - высокий уровень. //антидребезг появления признака переполнения, смена состояния с ПОЛНОГО на ПУСТОЙ происходит без задержки TrashFull=TON1.Run((digitalRead(LevelTrashPin))); //антидребезг появления признака нажатия и отжатия //кнопка нормально разомкнута, вход с подтягиванием, один конец на земле поэтому //никто не нажимает - уровень высокий на входе //кто то нажал - уровень низкий на входе //никто не нажимает на кнопку, но прошелся кот и выдернул провод - обрыв //обрыв - уровень высокий на входе, диагностировать линию в данной конфигурации нельзя, //но не очень то и нужно (с) Путин //не очень то и хотелось (с) Таня if (TOF1.Run((digitalRead(ButtonPin)))==false) {Pressed=true;} if (TON2.Run((digitalRead(ButtonPin)))==true) {Pressed=false;} //фильтрация значений с датчика уровня if (TON9.Run(!TON9.Q)) {us_level_raw=ultrasonic.distanceRead();}; us_level_filt=(1-w_level)*us_level_filt+w_level*us_level_raw; //Уровень в бачке кофемашины от 0 до HeightTank в см; level=constrain((HeightTank-us_level_filt), 0, HeightTank) ; //============================================================= //============================================================= //Секция интерпретирования поведения системы //NoFlow,igotit,check_pls //при нормальной работе за контрольное время работы уровень поднимается на dLevel_cp см и больше. //Если такое не происходит, значит у нас либо не работает насос, либо нет воды в бачке time_end=TON3.Run(PumpUp && !reset); if ((R_TRIG1.Run(PumpUp)==true) | (reset==true)) {level0=level;} //запоминаем уровень при старте насоса if ((time_end==true) && (level-level0<dLevel_cp)) {NoFlow=true;} else {NoFlow=false;} //после контрольного времени смотрим изменение уровня if ((time_end==true) && (NoFlow==false)) {reset=true;} else {reset=false;} //сбрасываем контрольное время и заново контролим уровень //В режиме ошибки и ожидания наблюдаем за нажатиями на кнопку. Считаем сколько раз нажали за контрольный интервал Pressed_now=R_TRIG2.Run(Pressed); //Контроль момента нажатия кнопки UnPressed_now=F_TRIG1.Run(Pressed); //Контроль момента отжатия кнопки if ((mode==2) | (mode==3)) { time_to_destroy=(button_cp-(millis()-t0)); //от button_cp сек через 0 и до минус бесконечность if ((Pressed_now==true) && (n_pressed==0) && (time_to_destroy<0)) {t0=millis();} //сбрасываем таймер разрушения только когда пройдет контроль предыдущего отрезка времени if ((UnPressed_now==true) && (time_to_destroy>=0)) {n_pressed=n_pressed+1;} //считываем сколько раз отпустили кнопку if (time_to_destroy<0) {n_pressed=0;} } //Считываем жест человека - "i got it"/я понял. Это означает что человек подтвердил сообщение о неисправности //и принял в работу для исправления, пищать больше не нужно. Человек показывает это следующим действием: //нажимает кнопку 1 раз за 3 секунды if ((mode==2) && (n_pressed==1)) {igotit=true; n_pressed==0;} //Считываем жесть человека - "check_pls"/проверь пожалуйста. Это означает что человек предпринял меры для устранения //неисправности или провел необходимые работы по пополнению бутыли исходной воды и слива отработанной воды и предлагает //вернуться к работе. Человек показывает это следующим действием: //нажимает кнопку 2 раза за 3 секунды if ((mode==3) && (n_pressed==2)) {check_pls=true; n_pressed==0;} //============================================================= //============================================================= //Секция переключения режимов //Если появился признак переполнения в бутыли слива или обрыва датчика, то переходим в режим ошибки и сообщаем код ошибки 1 if ((mode==1) && (TrashFull==true) && (millis()>t_nc)) {mode=2; error=1;} //Если появился признак обрыва до датчика или утопление самого датчика, то переходим в режим ошибки и сообщаем код ошибки 2 if ((mode==1) && (us_level_filt<us_level_filt_fault) && (millis()>t_nc)) {mode=2; error=2;} //Если появился признак отсутствия подачи воды от насоса, то переходим в режим ошибки и сообщаем код ошибки 3 if ((mode==1) && (NoFlow==true) && (millis()>t_nc)) {mode=2; error=3;} //Если у нас есть ошибка и человек подтвердил - переход в режим ожидания и сбрасываем код ошибки if ((mode==2) && (igotit==true)) {mode=3; error=0; igotit=false;} //Если мы в режиме ожидания и нас попросили проверить все ли ок с системой то переходим в нормальным режим и сбрасываем запрос проверки if ((mode==3) && (check_pls==true)) {mode=1; check_pls=false;} //============================================================= //============================================================= //Основная логика работы в зависимости от режима //статус программы: 1 - ВСЕ ОК, работаем; 2 - ОШИБКА, не подтвержденная; 3 - ОШИБКА подтверждена, ожидаем отмашки от человека; if (mode==1) { //Проверяем уровень if (level<=LowLevel) {PumpUp=true;} //Уровень ниже минимума - включаем насос if (level>HighLevel) {PumpUp=false;} //Уровень выше максимума - выключаем насос } if ((mode==2) | (mode==3)) {PumpUp=false;} //тут же выключаем насос чтобы не перегрелся //============================================================= //============================================================= //Секция действий по результату работы программы (Digital Output) //включаем и отключаем насос по признаку if (PumpUp==true) {digitalWrite(RelayPin, LOW);} else {digitalWrite(RelayPin, HIGH);} //Нижестоящий код реализован для писка без delay, который тормозил бы программу и делал бы ее неработоспособной //При переходе в режим 1-ый делаем секундный писк, что все ок, я перешел if (R_TRIG3.Run(mode==1)==true) {tone(BeepPin,f_mode,1000); beep_on=false; beep_pause_short=false; beep_pause_long=false; beep_pause_superlong=false; k_beep=0;} beep_duration_end=TON4.Run(beep_on); //отсчет длительности писка beep_pause_short_end=TON5.Run(beep_pause_short); //отсчет длительности короткой паузы beep_pause_long_end=TON6.Run(beep_pause_long); //отсчет длительности длинной паузы beep_pause_superlong_end=TON7.Run(beep_pause_superlong); //отсчет длительности супер длинной паузы //пищим в режиме 2-ом, количество писков соответствует номеру ошибки if (mode==2) { //блокировки писка: beep_granted=!beep_pause_long && !beep_pause_short && (k_beep<error); //включаем писк если дали разрешение if (beep_granted==true) {tone(BeepPin, f_error); beep_on=true;} //когда длительность писка закончилась, включаем паузу, короткую или длинную, в зависимости от кол-во озвученных писков и номера ошибки if (beep_duration_end==true) { noTone(BeepPin); k_beep=k_beep+1; //кол-во озвученных писков beep_on=false; //выключаем признак писка if (error>k_beep) {beep_pause_short=true; beep_pause_long=false;} else {beep_pause_long=true; beep_pause_short=false;} } //когда закончилась короткая пауза, выключаем признак if (beep_pause_short_end==true) {beep_pause_short=false;} //когда закончилась длинная пауза, выключаем признак if (beep_pause_long_end==true) {beep_pause_long=false; k_beep=0;} } //при переходе в другой режим, пищим высоко и инициализируем переменые писков if (R_TRIG4.Run(mode==3)==true) {tone(BeepPin,f_mode,1000); beep_on=false; beep_pause_short=false; beep_pause_long=false; beep_pause_superlong=true;} //пищим если мы в режиме ожидание, пищим раз в супердолгий интервал if (mode==3) { beep_granted=!beep_pause_superlong; //не пищим если только у нас есть пауза длительностью в 1 минуту if (beep_granted==true) {tone(BeepPin, f_error); beep_on=true;} //когда длительность писка закончилась, включаем паузу супердолгую if (beep_duration_end==true) { noTone(BeepPin); beep_on=false; //выключаем признак писка beep_pause_superlong=true; } //когда закончилась супердлинная пауза, выключаем признак if (beep_pause_superlong_end==true) {beep_pause_superlong=false;} } //============================================================= //============================================================= //Секция Debug, активируется из секции констант if ((debug_on==true) && (TON8.Run(!TON8.Q))) { //Чистим окно у клиента Serial.write(27); Serial.print("[2J"); // clear screen Serial.write(27); Serial.print("[H"); // cursor to home //И начинаем писать всякую информацию о состоянии системы Serial.println("=================Debug info of ArduOsch================="); Serial.println("=================DicreteInputs=========================="); Serial.print("LevelTrashPin="); Serial.print((digitalRead(LevelTrashPin))); Serial.print("| ButtonPin="); Serial.print(digitalRead(ButtonPin)); Serial.print("| US_raw="); Serial.print(us_level_raw); Serial.print("| US_filtered="); Serial.println(us_level_filt); Serial.println("=================DicreteInputs after processing========="); Serial.print("TrashFull="); Serial.print(TrashFull); Serial.print("| ButtonPressed="); Serial.print(Pressed); Serial.print("| Level="); Serial.println(level); Serial.println("=================NoFlow condition======================="); Serial.print("PumpUp="); Serial.print(PumpUp); Serial.print(" Time_end="); Serial.print(time_end); Serial.print(" Reset="); Serial.print(reset); Serial.print("| Level0==="); Serial.print(level0); Serial.print("| TON3_EST="); Serial.print(TON3.PT-TON3.ET); Serial.print("| NoFlow="); Serial.println(NoFlow); Serial.println("=================How mush was man clicked on button?===="); Serial.print("TimeToDestroy="); Serial.print(time_to_destroy); Serial.print("| t0="); Serial.print(t0); Serial.print("| n_pressed="); Serial.println(n_pressed); Serial.println("=================What is the system state?=============="); Serial.print("Mode="); Serial.print(mode); Serial.print("| error="); Serial.println(error); Serial.println("=================Beep code=============="); Serial.print("beep_granted="); Serial.print(beep_granted); Serial.print("| beep_pause_superlong="); Serial.print(beep_pause_superlong); Serial.print("| beep_pause_long="); Serial.print(beep_pause_long); Serial.print("| beep_pause_short="); Serial.println(beep_pause_short); Serial.print("k_beep="); Serial.print(k_beep); Serial.print("| beep_on="); Serial.println(beep_on); } //============================================================= }
Видео и фото
Видеодемонстрация как все это работает:
Кому не хочется смотреть видео, вот пару фоточек:




Как чехол использовал почти единственно доступный чехол в Казани, просто серый, как временное решение (что постояннее, чем временное?), потом можно будет красивые чехлы заказать, например, с логотипом фирмы.
Вместо заключения
Теперь меняем чистую воду раз в 4 дня, жидкость из бутылки для слива выливаем в пятницу, за 5 дней запахов не ощущалось. Все счастливы. Знай только выливать да менять бутыли. Никакого Сабантуя, хватит.
Делал это все на энтузиазме, которого у меня порой бывает хоть отбавляй, уж очень хотелось пользоваться кофемашиной без нервов, что ей нужно поддон почистить. Сделал первый вариант, где пару строчек, которая запускает/останавливает насос по уровню и пищит при переполнении «мусорки». Но потом подумал и решил сделать на совесть, с диагностикой датчиков, исполнительных механизмов, дабы насос прожил подольше при нашей интенсивной эксплуатации, не было протечек и недопонимания между ArduOsch и моими коллегами, в итоге все это вылилось в довольно таки большой код. Писал статью в стиле беллетристики, чтобы могли посмотреть-почитать с утра за чашечкой кофе, посмеяться чем люди занимаются иногда.
Всем всех благ!
