Введение
Возможность получения действительной информации о состоянии реальных объектов в реальном масштабе времени позволяет обоснованно приступать к следующему этапу анализа и синтеза систем – математическому моделированию динамических характеристик объектов управления.
В данной публикации рассматривается доступный в реализации проект системы измерения технологического параметра – температуры, с дистанционной передачей сигнала в вычислительную среду для дальнейшей обработки измерительной информации.
В основу данного проекта положены аппаратные средства для прототипирования на базе платформы Arduino со множеством совместимых с ними модулей и свободных программных средств Python, образующих интегрированную среду разработки Arduino Software.
Контур измерения температуры
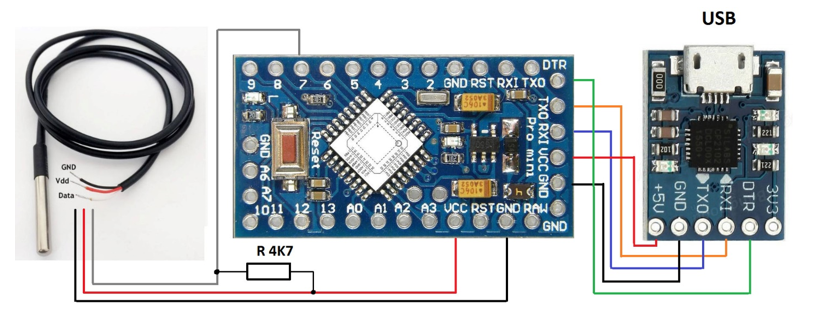
Контур измерения температуры состоит из первичного цифрового измерительного преобразователя – DS18B20 (Maxim Integrated), управление которым, по интерфейсу 1-wire, осуществляет микропроцессорный контроллер – Atmega328 (5V 16MHz (Microchip) на платформе Arduino Pro Mini.
Выходной сигнал измерительной информации с DS18B20 по интерфейсу 1-wire поступает на дискретный вход микроконтроллера, обрабатывается, преобразуется в строку ASCII символов измеренных значений температуры в диапазоне от -55 до +125 °C и, по стандартному последовательному интерфейсу, через TTL-USB преобразователь, поступает в компьютер для дальнейшей программной обработки:
Измерительная подсистема
Измерительная подсистема построена на базе платформы Arduino Nano V3:
Программное обеспечение составлено на базе примера, представленного на сайте [1], с использованием библиотеки OneWire, которую можно подключить через менеджера библиотек в интегрированной среде разработки Arduino Software:
#include <OneWire.h> // OneWire DS18B20 Temperature Example // http://www.pjrc.com/teensy/td_libs_OneWire.html // The DallasTemperature library can do all this work for you! // http://milesburton.com/Dallas_Temperature_Control_Library //Вывод Data преобразователя DS18B20 подключаем к 7-му выводу //платформы Arduino OneWire ds(7); void setup(void) { Serial.begin(9600); } void loop(void) { byte i; byte present = 0; byte type_s = 0; byte data[12]; byte addr[8]; float celsius; ds.search(addr); ds.reset(); ds.select(addr); ds.write(0x44, 1); delay(800); present = ds.reset(); ds.select(addr); ds.write(0xBE); // Read Scratchpad for ( i = 0; i < 9; i++) { data[i] = ds.read(); } int16_t raw = (data[1] << 8) | data[0]; celsius = (float)raw / 16.0; Serial.println(celsius); }
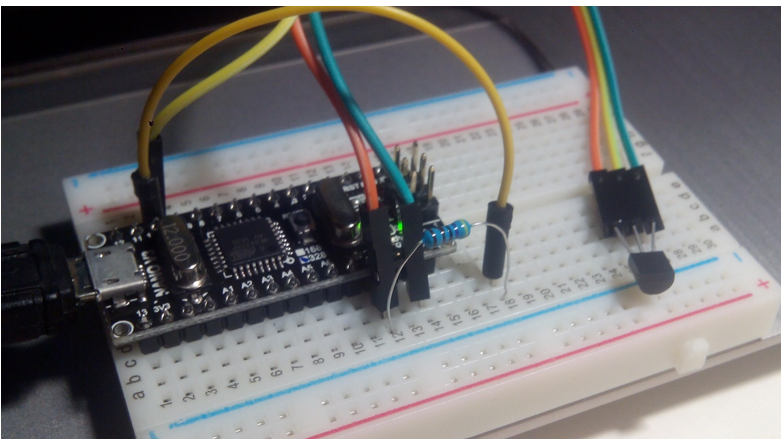
После отладки и тестирования приведенной программы прошивки контролера, приступаем к монтажу компонентов и элементов измерительной подсистемы, и к сборке в корпус:

В условиях требований к минимизации корпуса, используем платформу Arduino Pro Mini. Аппаратное обеспечение подсистемы обработки и представления измерительной информации осуществляется через USB порт компьютера.
Python интерфейс для обработки “кривой разгона” и её графической реализации
Основные задачи, решаемые подсистемой обработки и представления измерительной информации оператору:
- Управление и опрос виртуального COM порта через USB порт; здесь использованы функции библиотеки pySerial.
- Интерактивное взаимодействие с оператором; здесь вводим необходимое количество измерений и номер последовательного порта (смотрим в Диспетчере Устройств ОС MS Windows). Если номер порта введен верно и не занят другими программами, на консоль и в графическое окно выводятся текущие измеряемые значения технологического параметра. По окончании измерений, на консоли выводится продолжительность времени измерений, период опроса датчика и указание – в каком файле txt находится таблица с результатами измерений, а в графическое окно выводится график измерений, дата, время, номер эксперимента, период опроса датчика.
- Автоматическая регистрация результатов измерений; здесь на диске в папке со скриптом необходимо наличие файла count.txt, в котором записано целое без знаковое число, используемое как счётчик экспериментов; каждый последующий эксперимент увеличивает счётчик на единицу и добавляет значение счётчика к имени файла с таблицей результатов эксперимента.
Листинг программы:
import numpy as np import matplotlib.pyplot as plt import serial from drawnow import drawnow import datetime, time #вывод выборки в графическое окно def cur_graf(): plt.title("DS18B20") plt.ylim( 20, 40 ) plt.plot(nw, lw1, "r.-") plt.ylabel(r'$температура, \degree С$') plt.xlabel(r'$номер \ измерения$') plt.grid(True) #вывод всех списков в графическое окно def all_graf(): plt.close() plt.figure() plt.title("DS18B20\n" + str(count_v) + "-й эксперимент " + "(" + now.strftime("%d-%m-%Y %H:%M") + ")") plt.plot( n, l1, "r-") plt.ylabel(r'$температура, \degree С$') plt.xlabel(r'$номер \ измерения$' + '; (период опроса датчика: {:.6f}, c)'.format(Ts)) plt.grid(True) plt.show() #определяем количество измерений # общее количество измерений str_m = input("введите количество измерений: ") m = eval(str_m) # количество элементов выборки mw = 16 #настроить параметры последовательного порта ser = serial.Serial() ser.baudrate = 9600 port_num = input("введите номер последовательного порта: ") ser.port = 'COM' + port_num ser #открыть последовательный порт try: ser.open() ser.is_open print("соединились с: " + ser.portstr) except serial.SerialException: print("нет соединения с портом: " + ser.portstr) raise SystemExit(1) #определяем списки l1 = [] # для значений температуры t1 = [] lw1 = [] # для значений выборки температуры n = [] # для значений моментов времени nw = [] # для значений выборки моментов времени #подготовить файлы на диске для записи filename = 'count.txt' in_file = open(filename,"r") count = in_file.read() count_v = eval(count) + 1 in_file.close() in_file = open(filename,"w") count = str(count_v) in_file.write(count) in_file.close() filename = count + '_' + filename out_file = open(filename,"w") #вывод информации для оператора на консоль print("\n параметры:\n") print("n - номер измерения;") print("T - температура, град. С;") print("\n измеряемые значения величины температуры\n") print('{0}{1}\n'.format('n'.rjust(4),'T'.rjust(10))) #считывание данных из последовательного порта #накопление списков #формирование текущей выборки #вывод значений текущей выборки в графическое окно i = 0 while i < m: n.append(i) nw.append(n[i]) if i >= mw: nw.pop(0) line1 = ser.readline().decode('utf-8')[:-2] t1.append(time.time()) if line1: l1.append(eval(line1)) lw1.append(l1[i]) if i >= mw: lw1.pop(0) print('{0:4d} {1:10.2f}'.format(n[i],l1[i])) drawnow(cur_graf) i += 1 #закрыть последовательный порт ser.close() ser.is_open #time_tm -= time_t0 time_tm = t1[m - 1] - t1[0] print("\n продолжительность времени измерений: {0:.3f}, c".format(time_tm)) Ts = time_tm / (m - 1) print("\n период опроса датчика: {0:.6f}, c".format(Ts)) #запись таблицы в файл print("\n таблица находится в файле {}\n".format(filename)) for i in np.arange(0,len(n),1): count = str(n[i]) + "\t" + str(l1[i]) + "\n" out_file.write(count) #закрыть файл с таблицей out_file.close() out_file.closed #получить дату и время now = datetime.datetime.now() #вывести график в графическое окно all_graf() end = input("\n нажмите Ctrl-C, чтобы выйти ")
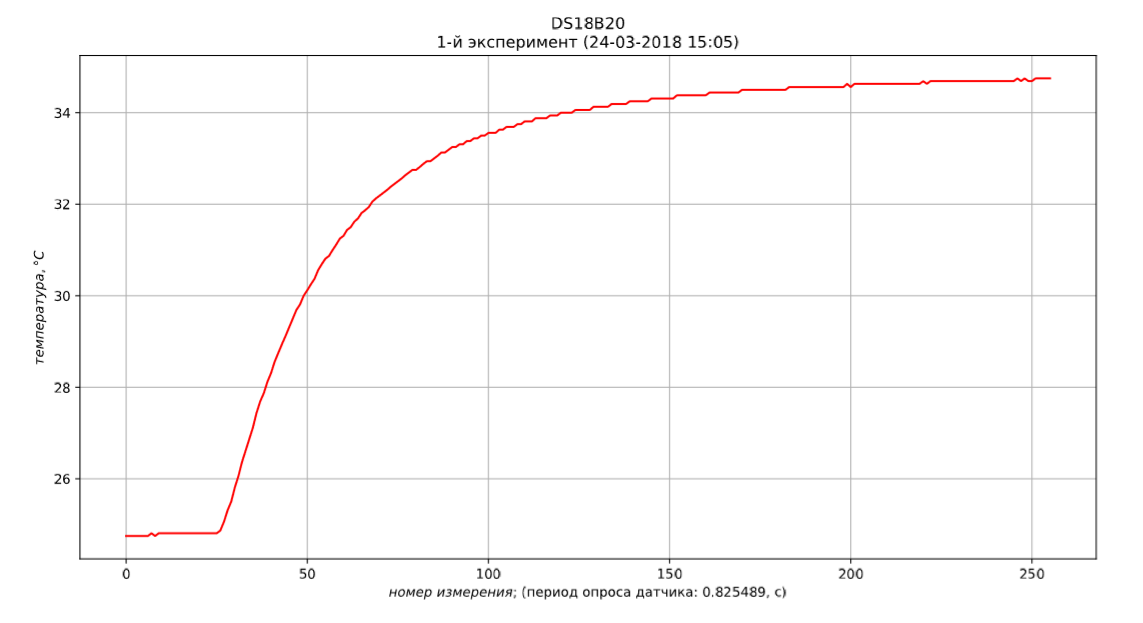
Получим:
введите количество измерений: 256
введите номер последовательного порта: 3
соединились с: COM3
параметры:
n — номер измерения;
T — температура, град. С;
измеряемые значения величины температуры
n T
0 24.75
1 24.75
2 24.75
3 24.75
4 24.75
5 24.75
6 24.75
…………….
Python интерфейс для получения передаточной функции и оценки адекватности модели
Для решения этой задачи можно использовать численные методы, поскольку модель не содержит дифференцирования, а предложенный метод решения согласно соотношениям не предполагает смены координаты времени. Кроме этого применим интерполяцию кубическим сплайном в соответствии со следующим листингом:
Определение передаточной функции объекта по каналу регулирования температуры
# -*- coding: utf8 -*- import matplotlib.pyplot as plt import time start = time.time() from scipy.interpolate import splev, splrep import scipy.integrate as spint import numpy as np from scipy.integrate import quad xx =np.array(np.arange(0,230,1)) yy1 =np.array([ 24.87, 25.06, 25.31, 25.5, 25.81, 26.06, 26.37, 26.62, 26.87, 27.12, 27.44, 27.69, 27.87, 28.12, 28.31, 28.56, 28.75, 28.94, 29.12, 29.31, 29.5, 29.69, 29.81, 30.0, 30.12, 30.25, 30.37, 30.56, 30.69, 30.81, 30.87, 31.0, 31.12, 31.25, 31.31, 31.44, 31.5, 31.62, 31.69, 31.81, 31.87, 31.94, 32.06, 32.13, 32.19, 32.25, 32.31, 32.38, 32.44, 32.5, 32.56, 32.63, 32.69, 32.75, 32.75, 32.81, 32.88, 32.94, 32.94, 33.0, 33.06, 33.13, 33.13, 33.19, 33.25, 33.25, 33.31, 33.31, 33.38, 33.38, 33.44, 33.44, 33.5, 33.5, 33.56, 33.56, 33.56, 33.63, 33.63, 33.69, 33.69, 33.69, 33.75, 33.75, 33.81, 33.81, 33.81, 33.88, 33.88, 33.88, 33.88, 33.94, 33.94, 33.94, 34.0, 34.0, 34.0, 34.0, 34.06, 34.06, 34.06, 34.06, 34.06, 34.13, 34.13, 34.13, 34.13, 34.13, 34.19, 34.19, 34.19, 34.19, 34.19, 34.25, 34.25, 34.25, 34.25, 34.25, 34.25, 34.31, 34.31, 34.31, 34.31, 34.31, 34.31, 34.31, 34.38, 34.38, 34.38, 34.38, 34.38, 34.38, 34.38, 34.38, 34.38, 34.44, 34.44, 34.44, 34.44, 34.44, 34.44, 34.44, 34.44, 34.44, 34.5, 34.5, 34.5, 34.5, 34.5, 34.5, 34.5, 34.5, 34.5, 34.5, 34.5, 34.5, 34.5, 34.56, 34.56, 34.56, 34.56, 34.56, 34.56, 34.56, 34.56, 34.56, 34.56, 34.56, 34.56, 34.56, 34.56, 34.56, 34.56, 34.63, 34.56, 34.63, 34.63, 34.63, 34.63, 34.63, 34.63, 34.63, 34.63, 34.63, 34.63, 34.63, 34.63, 34.63, 34.63, 34.63, 34.63, 34.63, 34.63, 34.63, 34.69, 34.63, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.69, 34.75, 34.69, 34.75, 34.69, 34.69, 34.75, 34.75, 34.75, 34.75, 34.75]) yy2=yy1-24.87#компенсация смещения нуля yy=yy2/max(yy2)#нормирование """ Интерполяция переходной характеристики при помощи сплайнов""" def h(x): spl = splrep(xx , yy ) return splev(x, spl) """ Численное интегрирование без смены координаты времени в соответствии с (6)""" S1=(spint.quad(lambda x:1-h(x),xx[0],xx[len(xx)-1])[0]) S2=(spint.quad(lambda x:(1-h(x))*(S1-x),xx[0],xx[len(xx)-1])[0]) S3=(spint.quad(lambda x:(1-h(x))*(S2-S1*x+(1/2)*x**2),xx[0],xx[len(xx)-1])[0]) S4=(spint.quad(lambda x:(1-h(x))*(S3-S2*x+S1*(1/2)*x**2-(1/6)*x**3),xx[0],xx[len(xx)-1])[0]) """ Определение коэффициентов передаточной функции""" b1=-S4/S3 a1=b1+S1 a2=b1*S1+S2 a3=b1*S2+S3 """ Возврат во временную область""" def ff(x,t): j=(-1)**0.5 return (2/np.pi)*( ((b1*x*j+1)*np.e**(-25*x)/(a3*(x*j)**3+a2*(x*j)**2+a1*x*j+1)).real)*(np.sin(x*t)/x) y=np.array([round(quad(lambda x: ff(x,t),0, 0.6)[0],2) for t in xx]) """ Определение критерия адекватности модели """ k=round(1-sum([(yy[i]-y[i])**2 for i in np.arange(0,len(yy)-1,1)])/sum([(yy[i])**2 for i in np.arange(0,len(yy)-1,1)]),5) stop = time.time() print ("Время работы программы :",round(stop-start,3)) plt.title('Идентификация модифицированным методом площадей.\n Адекватность модели: %s'%k) plt.plot(xx, yy,label='W=(%s*p+1)/(%s*p**3+%s*p**2+%s*p+1)'%(round(b1,1),round(a3,1),round(a2,1),round(a1,1))) plt.legend(loc='best') plt.grid(True) plt.show()
Получим:
Время работы программы: 1.144

Получена передаточная функция объекта (ёмкость с нагревателем) при адекватности к “кривой разгона”- 0,97.
Выводы
Разработан и испытан контроллер Arduino с датчиком температуры и Python интерфейсом для динамической идентификации объектов управления по каналу регулирования температуры.
Ссылка:
1. OneWire Library
