Если вы открыли данную статью, то наверняка уже слышали о кватернионах, и возможно даже используете их в своих разработках. Но пора подняться на уровень выше — к бикватернионам.
В данной статье даны основные понятия о бикватернионах и операции работы с ними. Для лучшего понимания работы с бикватернионами показан наглядный пример на Javascript с использованием Canvas.
Бикватернион — гиперкомплексное число, имеющее размерность 8. В англоязычных статьях и литературе они называются — «dual quaternion», в русскоязычной литературе встречается еще названия «дуальный кватернион» или «комплексный кватернион».
Основное отличие от кватернионов заключается в том, что кватернион описывает ориентацию объекта в пространстве, а бикватернион еще и положение объекта в пространстве.
Бикватернион можно представить в виде двух кватернионов:
 — действительная часть, определяет ориентацию объекта в пространстве;
— действительная часть, определяет ориентацию объекта в пространстве;
 — дуальная часть, определяет положение объекта в пространстве.
— дуальная часть, определяет положение объекта в пространстве.
Бикватернион также называют еще комплексным кватернионом, в этом случае его представляют в виде кватерниона, каждый компонент которого представляет собой дуальное число (не путать с комплексным). Дуальное число , где
, где  и
и  — действительные числа, а
— действительные числа, а  — символ (комплексность) Клиффорда, обладающий свойством
— символ (комплексность) Клиффорда, обладающий свойством  . Не будем углубляться в математику, так как нас интересует больше прикладная часть, поэтому далее — бикватернион будем рассматривать как два кватерниона.
. Не будем углубляться в математику, так как нас интересует больше прикладная часть, поэтому далее — бикватернион будем рассматривать как два кватерниона.
По аналогии с кватернионом, с помощью которого можно задать ориентацию объекта, бикватернионом можно задать еще и положение. Т.е. бикватернион задает сразу две величины — положение и ориентацию объекта в пространстве. Если их рассматривать в динамике, то бикватернион определяет две величины — линейную скорость перемещения и угловую скорость вращения объекта. На рисунке ниже показан геометрический смысл бикватерниона.
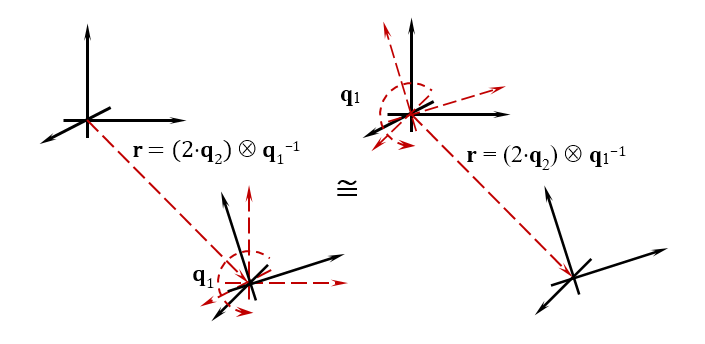
Разработчики игр знают, чтобы задать положение и ориентацию объекта в игровом пространстве применяются матрицы поворотов и матрицы перемещений, и, в зависимости от того, в какой последовательности вы их применяете, результат конечного положения объекта разный. Для тех, кто привык разделять движение на отдельные операции, для работы с бикватернионами примите за правило: сначала объект перемещаем, потом поворачиваем. Фактически, вы одним числом, пусть и сложным гиперкомплексным, описываете эти два движения.
Рассмотрим основные скалярные характеристики. Здесь надо обратить внимание на то, что они возвращают не обычные вещественные числа, а дуальные.
1. Норма бикватерниона
2. Модуль бикватерниона
Рассмотрим основные операции работы с бикватернионами. Как вы можете заметить, они очень похожи на аналогичные операции работы с кватернионами.
1. Бикватернионное сопряжение
2. Бикватернионное сложение и вычитание
Сложение и вычитание бикватернионов коммутативно (слагаемые можно менять местами).
3. Умножение действительного числа на бикватернион
4. Бикватернионное умножение
Бикватернионное умножение некоммутативно (при изменении порядка сомножителей результат бикватернионного умножения разный).
Данная операция является одной из основных при работе с бикватернионами и несет в себе физический смысл, а именно, результатом бикватернионного умножения является операция сложения поворотов и линейных перемещений двух бикватернионов.
5. Обратный бикватернион
Для начала определим системы координат, в которых будем рассматривать ориентацию и положение объекта в пространстве. Это необходимо сделать для задания действительной части бикватерниона (кватерниона ориентации), последовательность поворотов которого влияет на получаемый кватернион из углов ориентации. Здесь будем руководствоваться самолетными углами — рысканья , тангажа
, тангажа  и крена
и крена  .
.
Определим базовую систему координат. Представьте, что вы стоите на поверхности Земли и смотрите в направлении Севера.
Точка Oo — начало системы координат, располагается в точке начала движения объекта.
Ось OoYg — направленна вертикально вверх, и противоположна к направлению вектора силы тяжести.
Ось OoXg — направлена в сторону Севера, по касательной местного меридиана.
Ось OoZg — дополняет систему до правой и направлена вправо, в сторону Востока.
Вторая система координат — связанная. Представьте, например, самолет или другой объект.
Точка O — начало системы координат, как правило, располагается в точке центра масс объекта.
Ось OY — направлена вертикально вверх, и перпендикулярна горизонтальной плоскости объекта.
Ось OX — направлена вперед, к передней точке объекта.
Ось OZ — дополняет систему до правой.
Положение объекта в пространстве задается радиус-вектором начала (точка O) связанной системы координат относительно неподвижной базовой системы координат. Ориентация связанной системы координат относительно базовой определяется тремя последовательными поворотами на:
угол рысканья — поворот вокруг оси OY,
угол тангажа — поворот вокруг оси OZ,
угол крена — поворот вокруг оси OX.
Для первоначального определения бикватерниона необходимо задать действительную и дуальную части бикватерниона. Ориентация и положение объекта задается относительно некой базовой системы координат с помощью углов ориентации и вектора положения центра масс
и вектора положения центра масс  .
.
Действительную часть можно задать с помощью формулы:
Обратите внимание, если у вас последовательность поворотов другая, то выражения будут тоже другими.
Дуальная часть определяется выражением:
Вычислить углы ориентации можно из действительной части бикватерниона:
Положение объекта определяется выражением:
в результате получается вектор в кватернионной форме
Одно из замечательных свойств бикватернионов — это поворот и перемещение вектора из одной системы координат в другую. Пусть OoXgYgZg — неподвижная базовая система кординат, а OXYZ — связанная система координат объекта. Тогда ориентацию и положение объекта относительно базовой системы координат можно задать бикватернионом . Если задан вектор
. Если задан вектор  в связанной системе координат, тогда можно получить вектор
в связанной системе координат, тогда можно получить вектор  в базовой системе координат с помощью формулы:
в базовой системе координат с помощью формулы:
и обратно:
где — вектор в бикватернионной форме, 
Все вышеперечисленные операции работы с бикватернионами реализованы в javascript-библиотеке, в зависимости от ваших задач ее можно реализовать на других языках программирования. Основные функции работы с бикватернионами:
Для лучшего понимания основ применения бикватернионов в качестве примера, рассмотрим небольшую игру. Задается прямоугольная область — карта. По карте плавает корабль, на котором установлено поворотное орудие. Здесь необходимо учесть, что для корабля базовая система координат является система координат карты, а для орудия базовая система координат — корабль. Все объекты отрисовываются в системе координат карты и здесь будет интересно увидеть, как можно перейти от системы координат орудия в систему координат карты с помощью свойства бикватернионного умножения. Управление движением корабля осуществляется клавишами W, A, S, D. Направление орудия задается курсором мышки.

Корабль и орудие описываются двумя классами:
Так же заданы бикватернионные приращения при управлении кораблем. При движении вперед-назад (клавиши W, S) будет изменяться только дуальная часть бикватерниона, а при управлении вправо-влево (клавиши A, D) будет меняться действительная и дуальная часть бикватерниона, которая задает угол поворота.
В самом классе реализована только одна функция отрисовки корабля
В конструкторе класса орудия задается его форма в виде бикватернионных точек. Орудие будет отображаться в виде линии. Начальная ориентация и положение на корабле задается бикватернионом
В классе орудия также реализована только одна функция его отрисовки
Обработка управления кораблем и орудием реализована через события. За нажатие и отжатие клавиш управления кораблем отвечают четыре переменные
Одна из самых интересных функций, с точки зрения применения бикватернионных операций, это управление орудием корабля в направлении указателя мышки. Сначала координаты указателя мышки определяются в бикватернион
(Прим.: операции последовательного бикватернионного умножения читайте справа налево). И наконец, определяется угол между векторами орудия и мышки. Начальной точке орудия
В основном теле программы инициализируются объекты корабля и орудия
В ссылке на архив содержится полный код библиотек работы с кватернионами и бикватернионами, сам скрипт программы и файл index.html, который можно открыть локально в браузере, для того чтобы запустить рассмотренный выше пример.
Пример работы с бикватернионами
У вас может возникнуть вопрос: зачем применять такой сложный математический аппарат, когда можно обойтись стандартными средствами для перемещения и вращения объектов? Одним из основных преимуществ заключается в том, что бикватернионная форма записи является более эффективной в вычислительном плане, так как все операции работы с бикватернионами после раскрытия выражений являются линейными. В данном видео Geometric Skinning with Approximate Dual Quaternion Blending показано насколько эффективнее вычисления с использованием бикватернионов в сравнении с другими методами.
Информацию по применению бикватернионов я в основном брал из англоязычных источников.
Из отечественной литературы я могу посоветовать две книги:
В данной статье даны основные понятия о бикватернионах и операции работы с ними. Для лучшего понимания работы с бикватернионами показан наглядный пример на Javascript с использованием Canvas.
Определение бикватерниона
Бикватернион — гиперкомплексное число, имеющее размерность 8. В англоязычных статьях и литературе они называются — «dual quaternion», в русскоязычной литературе встречается еще названия «дуальный кватернион» или «комплексный кватернион».
Основное отличие от кватернионов заключается в том, что кватернион описывает ориентацию объекта в пространстве, а бикватернион еще и положение объекта в пространстве.
Бикватернион можно представить в виде двух кватернионов:

— действительная часть, определяет ориентацию объекта в пространстве; — дуальная часть, определяет положение объекта в пространстве.Бикватернион также называют еще комплексным кватернионом, в этом случае его представляют в виде кватерниона, каждый компонент которого представляет собой дуальное число (не путать с комплексным). Дуальное число
, где и — действительные числа, а — символ (комплексность) Клиффорда, обладающий свойством . Не будем углубляться в математику, так как нас интересует больше прикладная часть, поэтому далее — бикватернион будем рассматривать как два кватерниона.Геометрическая интерпретация бикватерниона
По аналогии с кватернионом, с помощью которого можно задать ориентацию объекта, бикватернионом можно задать еще и положение. Т.е. бикватернион задает сразу две величины — положение и ориентацию объекта в пространстве. Если их рассматривать в динамике, то бикватернион определяет две величины — линейную скорость перемещения и угловую скорость вращения объекта. На рисунке ниже показан геометрический смысл бикватерниона.
Разработчики игр знают, чтобы задать положение и ориентацию объекта в игровом пространстве применяются матрицы поворотов и матрицы перемещений, и, в зависимости от того, в какой последовательности вы их применяете, результат конечного положения объекта разный. Для тех, кто привык разделять движение на отдельные операции, для работы с бикватернионами примите за правило: сначала объект перемещаем, потом поворачиваем. Фактически, вы одним числом, пусть и сложным гиперкомплексным, описываете эти два движения.
Скалярные характеристики
Рассмотрим основные скалярные характеристики. Здесь надо обратить внимание на то, что они возвращают не обычные вещественные числа, а дуальные.
1. Норма бикватерниона

2. Модуль бикватерниона

Основные операции
Рассмотрим основные операции работы с бикватернионами. Как вы можете заметить, они очень похожи на аналогичные операции работы с кватернионами.
1. Бикватернионное сопряжение

2. Бикватернионное сложение и вычитание

Сложение и вычитание бикватернионов коммутативно (слагаемые можно менять местами).
3. Умножение действительного числа на бикватернион

4. Бикватернионное умножение

Бикватернионное умножение некоммутативно (при изменении порядка сомножителей результат бикватернионного умножения разный).
Данная операция является одной из основных при работе с бикватернионами и несет в себе физический смысл, а именно, результатом бикватернионного умножения является операция сложения поворотов и линейных перемещений двух бикватернионов.
5. Обратный бикватернион

Определение бикватерниона через углы ориентации и вектор положения
Для начала определим системы координат, в которых будем рассматривать ориентацию и положение объекта в пространстве. Это необходимо сделать для задания действительной части бикватерниона (кватерниона ориентации), последовательность поворотов которого влияет на получаемый кватернион из углов ориентации. Здесь будем руководствоваться самолетными углами — рысканья
, тангажа и крена .Определим базовую систему координат. Представьте, что вы стоите на поверхности Земли и смотрите в направлении Севера.
Точка Oo — начало системы координат, располагается в точке начала движения объекта.
Ось OoYg — направленна вертикально вверх, и противоположна к направлению вектора силы тяжести.
Ось OoXg — направлена в сторону Севера, по касательной местного меридиана.
Ось OoZg — дополняет систему до правой и направлена вправо, в сторону Востока.
Вторая система координат — связанная. Представьте, например, самолет или другой объект.
Точка O — начало системы координат, как правило, располагается в точке центра масс объекта.
Ось OY — направлена вертикально вверх, и перпендикулярна горизонтальной плоскости объекта.
Ось OX — направлена вперед, к передней точке объекта.
Ось OZ — дополняет систему до правой.
Положение объекта в пространстве задается радиус-вектором начала (точка O) связанной системы координат относительно неподвижной базовой системы координат. Ориентация связанной системы координат относительно базовой определяется тремя последовательными поворотами на:
угол рысканья
— поворот вокруг оси OY, угол тангажа
— поворот вокруг оси OZ, угол крена
— поворот вокруг оси OX.Для первоначального определения бикватерниона необходимо задать действительную и дуальную части бикватерниона. Ориентация и положение объекта задается относительно некой базовой системы координат с помощью углов ориентации
и вектора положения центра масс .Действительную часть
можно задать с помощью формулы:
Обратите внимание, если у вас последовательность поворотов другая, то выражения будут тоже другими.
Дуальная часть
определяется выражением:
Вычисление углов ориентации и вектора положения из бикватерниона. Обратное преобразование
Вычислить углы ориентации можно из действительной части бикватерниона
:


Положение объекта определяется выражением:

в результате получается вектор в кватернионной форме
Поворот и перемещение вектора бикватернионом
Одно из замечательных свойств бикватернионов — это поворот и перемещение вектора из одной системы координат в другую. Пусть OoXgYgZg — неподвижная базовая система кординат, а OXYZ — связанная система координат объекта. Тогда ориентацию и положение объекта относительно базовой системы координат можно задать бикватернионом
. Если задан вектор в связанной системе координат, тогда можно получить вектор в базовой системе координат с помощью формулы:
и обратно:

где
— вектор в бикватернионной форме, JavaScript-библиотека работы с бикватернионами
Все вышеперечисленные операции работы с бикватернионами реализованы в javascript-библиотеке, в зависимости от ваших задач ее можно реализовать на других языках программирования. Основные функции работы с бикватернионами:
| Функция | Описание |
|---|---|
DualQuaternion.dq |
Тело бикватерниона в виде массива 8-ми чисел |
DualQuaternion(dq0, dq1, dq2, dq3, dq4, dq5, dq6, dq7) |
Конструктор, который определяет бикватернион путем заданием всех восьми чисел |
DualQuaternion.fromEulerVector(psi, theta, gamma, v) |
Получить бикватернион путем задания ориентации объекта углами Эйлера и вектора положения объекта |
DualQuaternion.getEulerVector() |
Получить углы Эйлера и вектор положения из бикватерниона |
DualQuaternion.getVector() |
Получить вектор положения из бикватерниона |
DualQuaternion.getReal() |
Получить действительную часть бикватерниона (определяет ориентацию объекта в пространстве) |
DualQuaternion.getDual() |
Получить дуальную часть бикватерниона (определяет положение объекта в пространстве) |
DualQuaternion.norm() |
Получить норму бикватерниона в виде дуального числа |
DualQuaternion.mod() |
Получить модуль бикватерниона в виде дуального числа |
DualQuaternion.conjugate() |
Получить сопряженный бикватернион |
DualQuaternion.inverse() |
Получить обратный бикватернион |
DualQuaternion.mul(DQ2) |
Бикватернионное умножение |
DualQuaternion.toString() |
Преобразовать бикватернион в строчку, например, для вывода в отладочную консоль |
Файл dual_quaternion.js
/** * * Author 2017, Akhramovich A. Sergey (akhramovichsa@gmail.com) * see https://github.com/infusion/Quaternion.js */ // 'use strict'; /** * Dual Quaternion constructor * * @constructor * @returns {DualQuaternion} */ function DualQuaternion(dq0, dq1, dq2, dq3, dq4, dq5, dq6, dq7) { if (dq0 === undefined) { this.dq = [1, 0, 0, 0, 0, 0, 0, 0]; } else { this.dq = [dq0, dq1, dq2, dq3, dq4, dq5, dq6, dq7]; } return this; }; // Получение кватерниона по углам Эйлера и вектору положения DualQuaternion['fromEulerVector'] = function(psi, theta, gamma, v) { var q_real = new Quaternion.fromEuler(psi, theta, gamma); var q_v = new Quaternion(0, v[0], v[1], v[2]); var q_dual = q_v.mul(q_real); return new DualQuaternion( q_real.q[0], q_real.q[1], q_real.q[2], q_real.q[3], q_dual.q[0]*0.5, q_dual.q[1]*0.5, q_dual.q[2]*0.5, q_dual.q[3]*0.5); }; DualQuaternion.prototype = { 'dq': [1, 0, 0, 0, 0, 0, 0, 0], /** * Получение углов Эйлера (psi, theta, gamma) и вектора положения из бикватерниона */ 'getEulerVector': function() { var euler_angles = this.getReal().getEuler(); var q_dual = this.getDual(); var q_dual_2 = new Quaternion(2.0*q_dual.q[0], 2.0*q_dual.q[1], 2.0*q_dual.q[2], 2.0*q_dual.q[3]); var q_vector = q_dual_2.mul(this.getReal().conjugate()); return [euler_angles[0], euler_angles[1], euler_angles[2], q_vector.q[1], q_vector.q[2], q_vector.q[3]]; }, /** * Получение только вектора положения из бикватерниона */ 'getVector': function() { var euler_vector = this.getEulerVector(); return [euler_vector[3], euler_vector[4], euler_vector[5]]; }, /** * Получить действительную часть бикватерниона * @returns {Quaternion} */ 'getReal': function() { return new Quaternion(this.dq[0], this.dq[1], this.dq[2], this.dq[3]); }, /** * Получить дуальную часть бикватерниона * @returns {Quaternion} */ 'getDual': function() { return new Quaternion(this.dq[4], this.dq[5], this.dq[6], this.dq[7]); }, /** * Норма бикватерниона * Внимание! Возвращает дуальное число! */ 'norm': function() { return [Math.pow(this.dq[0], 2) + Math.pow(this.dq[1], 2) + Math.pow(this.dq[2], 2) + Math.pow(this.dq[3], 2), this.dq[0]*this.dq[4] + this.dq[1]*this.dq[5] + this.dq[2]*this.dq[6] + this.dq[3]*this.dq[7]]; }, /** * Модуль бикватерниона * Внимание! Возвращает дуальное число! */ 'mod': function() { var q_real_mod = Math.sqrt(Math.pow(this.dq[0], 2) + Math.pow(this.dq[1], 2) + Math.pow(this.dq[2], 2) + Math.pow(this.dq[3], 2)); return [q_real_mod, (this.dq[0]*this.dq[4] + this.dq[1]*this.dq[5] + this.dq[2]*this.dq[6] + this.dq[3]*this.dq[7])/q_real_mod]; }, /** * Сопряженный бикватернион * DQ' := (dq0, -dq1, -dq2, -dq3, dq4, -dq5, -dq6, -dq7) */ 'conjugate': function() { return new DualQuaternion(this.dq[0], -this.dq[1], -this.dq[2], -this.dq[3], this.dq[4], -this.dq[5], -this.dq[6], -this.dq[7]); }, // Вычислить обратный бикватернион 'inverse': function() { var q_real_norm = new Quaternion(this.dq[0], this.dq[1], this.dq[2], this.dq[3]).norm(); var dq_norm_inv = [q_real_norm, - (this.dq[0]*this.dq[4] + this.dq[1]*this.dq[5] + this.dq[2]*this.dq[6] + this.dq[3]*this.dq[7])/q_real_norm]; var dq_conj = this.conjugate(); // Умножение бикватерниона на дуальное число return new DualQuaternion( dq_norm_inv[0] * dq_conj.dq[0], dq_norm_inv[0] * dq_conj.dq[1], dq_norm_inv[0] * dq_conj.dq[2], dq_norm_inv[0] * dq_conj.dq[3], dq_norm_inv[0] * dq_conj.dq[4] + dq_norm_inv[1] * dq_conj.dq[0], dq_norm_inv[0] * dq_conj.dq[5] + dq_norm_inv[1] * dq_conj.dq[1], dq_norm_inv[0] * dq_conj.dq[6] + dq_norm_inv[1] * dq_conj.dq[2], dq_norm_inv[0] * dq_conj.dq[7] + dq_norm_inv[1] * dq_conj.dq[3]); }, /** * Бикватернионное умножение * q1_real*q2_real, q1_real*q2_dual + q1_dual*q2_real */ 'mul': function(DQ2) { var q1_real = this.getReal(); var q1_dual = this.getDual(); var q2_real = DQ2.getReal(); var q2_dual = DQ2.getDual(); var q_res_real = q1_real.mul(q2_real); var q_res_dual_1 = q1_real.mul(q2_dual); var q_res_dual_2 = q1_dual.mul(q2_real); return new DualQuaternion( q_res_real.q[0], q_res_real.q[1], q_res_real.q[2], q_res_real.q[3], q_res_dual_1.q[0] + q_res_dual_2.q[0], q_res_dual_1.q[1] + q_res_dual_2.q[1], q_res_dual_1.q[2] + q_res_dual_2.q[2], q_res_dual_1.q[3] + q_res_dual_2.q[3]); }, /** * Преобразование вектора бикватернионом */ 'transformVector': function (v) { var dq_res = this.mul(new DualQuaternion(1, 0, 0, 0, 0, v[0], v[1], v[2])).mul(this.conjugate()); return [dq_res.dq[5], dq_res.dq[6], dq_res.dq[7]]; }, /** * Преобразовать в строку, для отладки */ 'toString': function() { return '[' + this.dq[0].toString() + ', ' + this.dq[1].toString() + ', ' + this.dq[2].toString() + ', ' + this.dq[3].toString() + ', ' + this.dq[4].toString() + ', ' + this.dq[5].toString() + ', ' + this.dq[6].toString() + ', ' + this.dq[7].toString() + ']'; } } /* // TEST: var dq1 = new DualQuaternion.fromEulerVector(0 * Math.PI/180.0, 0 * Math.PI/180, 0 * Math.PI/180, [10, 20, 30]); console.log(dq1.toString()); console.log('getEulerVector = ', dq1.getEulerVector()); console.log('norm = ', dq1.norm()); console.log('mod = ', dq1.mod()); console.log('conjugate = ', dq1.conjugate().dq); console.log('inverse = ', dq1.inverse().dq); var dq2 = new DualQuaternion.fromEulerVector(0 * Math.PI/180.0, 0 * Math.PI/180, 0 * Math.PI/180, [10, 0, 0]); console.log('mul = ', dq1.mul(dq2).dq); console.log('transformVector ??? = ', dq1.transformVector([0, 0, 0])); */
Пример работы с бикватернионами
Для лучшего понимания основ применения бикватернионов в качестве примера, рассмотрим небольшую игру. Задается прямоугольная область — карта. По карте плавает корабль, на котором установлено поворотное орудие. Здесь необходимо учесть, что для корабля базовая система координат является система координат карты, а для орудия базовая система координат — корабль. Все объекты отрисовываются в системе координат карты и здесь будет интересно увидеть, как можно перейти от системы координат орудия в систему координат карты с помощью свойства бикватернионного умножения. Управление движением корабля осуществляется клавишами W, A, S, D. Направление орудия задается курсором мышки.
Корабль и орудие описываются двумя классами:
Ship и Gun. В конструкторе класса корабля задается его форма в виде бикватернионных точек, начальная ориентация и положение на карте в виде бикватерниона this.dq_pos.Так же заданы бикватернионные приращения при управлении кораблем. При движении вперед-назад (клавиши W, S) будет изменяться только дуальная часть бикватерниона, а при управлении вправо-влево (клавиши A, D) будет меняться действительная и дуальная часть бикватерниона, которая задает угол поворота.
function Ship(ctx, v) { this.ctx = ctx; this.dq_pos = new DualQuaternion.fromEulerVector(0*Math.PI/180, 0, 0, v); // Форма корабля this.dq_forward_left = new DualQuaternion.fromEulerVector(0, 0, 0, [ 15, 0, -10]); this.dq_forward_right = new DualQuaternion.fromEulerVector(0, 0, 0, [ 15, 0, 10]); this.dq_backward_left = new DualQuaternion.fromEulerVector(0, 0, 0, [-15, 0, -10]); this.dq_backward_right = new DualQuaternion.fromEulerVector(0, 0, 0, [-15, 0, 10]); this.dq_forward_forward = new DualQuaternion.fromEulerVector(0, 0, 0, [ 30, 0, 0]); // Приращения текущей позиции при управлении this.dq_dx_left = new DualQuaternion.fromEulerVector( 1*Math.PI/180, 0, 0, [0, 0, 0]); this.dq_dx_right = new DualQuaternion.fromEulerVector(-1*Math.PI/180, 0, 0, [0, 0, 0]); this.dq_dx_forward = new DualQuaternion.fromEulerVector(0, 0, 0, [ 1, 0, 0]); this.dq_dx_backward = new DualQuaternion.fromEulerVector(0, 0, 0, [-1, 0, 0]); return this; };
В самом классе реализована только одна функция отрисовки корабля
Ship.draw(). Обратите внимание на применение операции бикватернионного умножения каждой точки корабля на бикватернион текущей позицию и ориентации корабля.Ship.prototype = { 'ctx': 0, 'dq_pos': new DualQuaternion.fromEulerVector(0, 0, 0, 0, 0, 0), /** * Нарисовать кораблик */ 'draw': function() { // Переместить все точки кораблика с помощью бикватернионного умножения v_pos = this.dq_pos.getVector(); v_forward_left = this.dq_pos.mul(this.dq_forward_left).getVector(); v_forward_right = this.dq_pos.mul(this.dq_forward_right).getVector(); v_backward_left = this.dq_pos.mul(this.dq_backward_left).getVector(); v_backward_right = this.dq_pos.mul(this.dq_backward_right).getVector(); v_forward_forward = this.dq_pos.mul(this.dq_forward_forward).getVector(); // Непосредственно рисование ctx.beginPath(); ctx.moveTo(v_backward_left[0], v_backward_left[2]); ctx.lineTo(v_forward_left[0], v_forward_left[2]); ctx.lineTo(v_forward_left[0], v_forward_left[2]); ctx.lineTo(v_forward_forward[0], v_forward_forward[2]); ctx.lineTo(v_forward_right[0], v_forward_right[2]); ctx.lineTo(v_backward_right[0], v_backward_right[2]); ctx.lineTo(v_backward_left[0], v_backward_left[2]); ctx.stroke(); ctx.closePath(); } };
В конструкторе класса орудия задается его форма в виде бикватернионных точек. Орудие будет отображаться в виде линии. Начальная ориентация и положение на корабле задается бикватернионом
this.dq_pos. Также задается и привязка к кораблю, на котором оно установлено. Орудие на корабле может только вращаться, поэтому бикватернионные приращения при управлении орудием будут менять только действительную часть бикватерниона, которая задает угол поворота. В данном примере реализовано наведение орудия с помощью курсора мышки, поэтому вращение орудия будет происходить мгновенно.function Gun(ctx, ship, v) { this.ctx = ctx; this.ship = ship; // Позиция орудия относительно корабля this.dq_pos = new DualQuaternion.fromEulerVector(0, 0, 0, v); // Форма орудия this.dq_forward = new DualQuaternion.fromEulerVector(0, 0, 0, [20, 0, 0]); this.dq_backward = new DualQuaternion.fromEulerVector(0, 0, 0, [ 0, 0, 0]); // Вращение орудия при управлении this.dq_dx_left = new DualQuaternion.fromEulerVector( 1*Math.PI/180, 0, 0, [0, 0, 0]); this.dq_dx_right = new DualQuaternion.fromEulerVector(-1*Math.PI/180, 0, 0, [0, 0, 0]); return this; };
В классе орудия также реализована только одна функция его отрисовки
Ship.draw(). Орудие отображается в виде линии, которая задается двумя точками this.dq_backward и this.dq_forward. Для определения координат точек орудия применяется операция бикватернионного умножения.Gun.prototype = { 'ctx': 0, 'ship': 0, 'dq_pos': new DualQuaternion.fromEulerVector(0, 0, 0, [0, 0, 0]), /** * Нарисовать орудие */ 'draw': function() { // Переместить орудие относительно корабля v_pos = this.ship.dq_pos.getVector(); v_forward = this.ship.dq_pos.mul(this.dq_backward).mul(this.dq_forward).getVector(); v_backward = this.ship.dq_pos.mul(this.dq_backward).getVector(); // Непосредственно рисование ctx.beginPath(); ctx.moveTo(v_backward[0], v_backward[2]); ctx.lineTo(v_forward[0], v_forward[2]); ctx.stroke(); ctx.closePath(); } };
Обработка управления кораблем и орудием реализована через события. За нажатие и отжатие клавиш управления кораблем отвечают четыре переменные
leftPressed, upPressed, rightPressed, downPressed, которые обрабатываются в основном цикле программы.leftPressed = false; rightPressed = false; upPressed = false; downPressed = false; dq_mouse_pos = new DualQuaternion.fromEulerVector(0, 0, 0, [0, 0, 0]); document.addEventListener("keydown", keyDownHandler, false); document.addEventListener("keyup", keyUpHandler, false); document.addEventListener("mousemove", mouseMoveHandler, false); // Обработка нажатия клавиш управления function keyDownHandler(e) { if (e.keyCode == 37 || e.keyCode == 65 || e.keyCode == 97) { leftPressed = true; } // влево A else if (e.keyCode == 38 || e.keyCode == 87 || e.keyCode == 119) { upPressed = true; } // вверх W else if (e.keyCode == 39 || e.keyCode == 68 || e.keyCode == 100) { rightPressed = true; } // вправо D else if (e.keyCode == 40 || e.keyCode == 83 || e.keyCode == 115) { downPressed = true; } // вниз S } // Обработка отжатия клавиш управления function keyUpHandler(e) { if (e.keyCode == 37 || e.keyCode == 65 || e.keyCode == 97) { leftPressed = false; } // влево A else if (e.keyCode == 38 || e.keyCode == 87 || e.keyCode == 119) { upPressed = false; } // вверх W else if (e.keyCode == 39 || e.keyCode == 68 || e.keyCode == 100) { rightPressed = false; } // вправо D else if (e.keyCode == 40 || e.keyCode == 83 || e.keyCode == 115) { downPressed = false; } // вниз S }
Одна из самых интересных функций, с точки зрения применения бикватернионных операций, это управление орудием корабля в направлении указателя мышки. Сначала координаты указателя мышки определяются в бикватернион
dq_mouse_pos. Затем вычисляется бикватернион положения мышки относительно корабля с помощью бикватернионного умножения. От бикватерниона мышки отнимается бикватернион корабля dq_mouse_pos_about_ship = ship_1.dq_pos.inverse().mul(dq_mouse_pos);(Прим.: операции последовательного бикватернионного умножения читайте справа налево). И наконец, определяется угол между векторами орудия и мышки. Начальной точке орудия
gun_1.dq_backward присваивается полученное значение.function mouseMoveHandler(e) { var relativeX = e.clientX - canvas.offsetLeft; var relativeY = e.clientY - canvas.offsetTop; // Обрабатывать события только когда курсор мышки находится в игровой области if (relativeX > 0 && relativeX < canvas.width && relativeY > 0 && relativeY < canvas.height) { // Бикватернион положения мышки dq_mouse_pos = new DualQuaternion.fromEulerVector(0, 0, 0, [relativeX, 0, relativeY]); // Бикватернион положения мышки относительно корабля // Направление орудия. От координат мышки отнимается координаты корабля // Последовательность бикватернионного умножения важна // DQ_ship^(-1) * DQ_mouse dq_mouse_pos_about_ship = ship_1.dq_pos.inverse().mul(dq_mouse_pos); // Угол между векторами орудия и мышки q_gun_mouse = new Quaternion.fromBetweenVectors(gun_1.dq_forward.getVector(), dq_mouse_pos_about_ship.getVector()); dq_gun_mouse = new DualQuaternion(q_gun_mouse.q[0], q_gun_mouse.q[1], q_gun_mouse.q[2], q_gun_mouse.q[3], 0, 0, 0, 0); gun_1.dq_backward = dq_gun_mouse; // console.log(dq_gun_mouse.getEulerVector()); // console.log(relativeX + ' ' + relativeY + ' ' + gun_1.dq_forward.toString()); } }
В основном теле программы инициализируются объекты корабля и орудия
ship_1 и gun_1, выводится отладочная информация и осуществляется обработка управления кораблем.var canvas = document.getElementById("myCanvas"); var ctx = canvas.getContext("2d"); ship_1 = new Ship(ctx, [100, 0, 100]); gun_1 = new Gun(ctx, ship_1, [0, 0, 0]); function draw() { ctx.clearRect(0, 0, canvas.width, canvas.height); ship_1.draw(); gun_1.draw(); // Debug info ship_euler_vector = ship_1.dq_pos.getEulerVector(); ship_euler_vector[0] = ship_euler_vector[0]*180/Math.PI; ship_euler_vector[1] = ship_euler_vector[1]*180/Math.PI; ship_euler_vector[2] = ship_euler_vector[2]*180/Math.PI; ship_euler_vector = ship_euler_vector.map(function(each_element){ return each_element.toFixed(2); }); ship_dq = ship_1.dq_pos.dq.map(function(each_element){ return each_element.toFixed(2); }); gun_dq = ship_1.dq_pos.mul(gun_1.dq_backward).dq.map(function(each_element){ return each_element.toFixed(2); }); ctx.font = "8pt Courier"; ctx.fillText("Ship: " + ship_dq + " | psi, theta, gamma, vector:" + ship_euler_vector, 10, 20); ctx.fillText("Gun: " + gun_dq, 10, 40); // Управление корабликом if (leftPressed) { ship_1.dq_pos = ship_1.dq_pos.mul(ship_1.dq_dx_left); } if (rightPressed) { ship_1.dq_pos = ship_1.dq_pos.mul(ship_1.dq_dx_right); } if (upPressed) { ship_1.dq_pos = ship_1.dq_pos.mul(ship_1.dq_dx_forward); } if (downPressed) { ship_1.dq_pos = ship_1.dq_pos.mul(ship_1.dq_dx_backward); } requestAnimationFrame(draw); } draw();
В ссылке на архив содержится полный код библиотек работы с кватернионами и бикватернионами, сам скрипт программы и файл index.html, который можно открыть локально в браузере, для того чтобы запустить рассмотренный выше пример.
Пример работы с бикватернионами
Заключение
У вас может возникнуть вопрос: зачем применять такой сложный математический аппарат, когда можно обойтись стандартными средствами для перемещения и вращения объектов? Одним из основных преимуществ заключается в том, что бикватернионная форма записи является более эффективной в вычислительном плане, так как все операции работы с бикватернионами после раскрытия выражений являются линейными. В данном видео Geometric Skinning with Approximate Dual Quaternion Blending показано насколько эффективнее вычисления с использованием бикватернионов в сравнении с другими методами.
Информацию по применению бикватернионов я в основном брал из англоязычных источников.
Из отечественной литературы я могу посоветовать две книги:
- Челноков Юрий Николаевич. Кватернионные и бикватернионные модели и методы механики твердого тела и их приложения. Геометрия и кинематика движения. — монументальный теоретический труд.
- Гордеев Вадим Николаевич. Кватернионы и бикватернионы с приложениями в геометрии и механике. — написана более понятным языком и показаны применения в задачах формообразования криволинейных пространственных структур.
