Всем привет! Разработка гексапода продвигается и наконец-то базовая математическая часть протестирована и готова к документированию. Чтобы проект дожил до конца и не остался пылиться на полке нужно видеть его сдвиги в положительную сторону, даже если они незначительны. В этой статье я расскажу об алгоритме решения обратной задачи кинематики и наглядно покажу его в действии. Надеюсь будет интересно.
Этапы разработки:
Часть 1 — проектирование
Часть 2 — сборка
Часть 3 — кинематика
Часть 4 — математика траекторий и последовательности
Часть 5 — электроника
Часть 6 — переход на 3D печать
Часть 7 — новый корпус, прикладное ПО и протоколы общения
Часть 8 — улучшенная математика передвижения
Часть 9 — завершение версии 1.00
Системы координат
Для начала стоит определится с системами координат робота — их аж целых три:
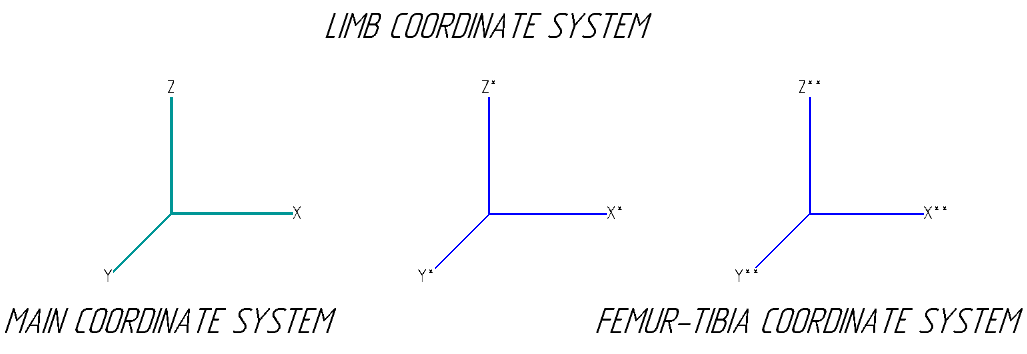
По сути они ни чем друг от друга не отличаются, но располагаются в разных местах корпуса и могут быть повернуты относительно друг друга на какой-то угол. При виде сверху расположение осей будет следующим (параметр coxa_zero_rotate будет описан чуть позже):
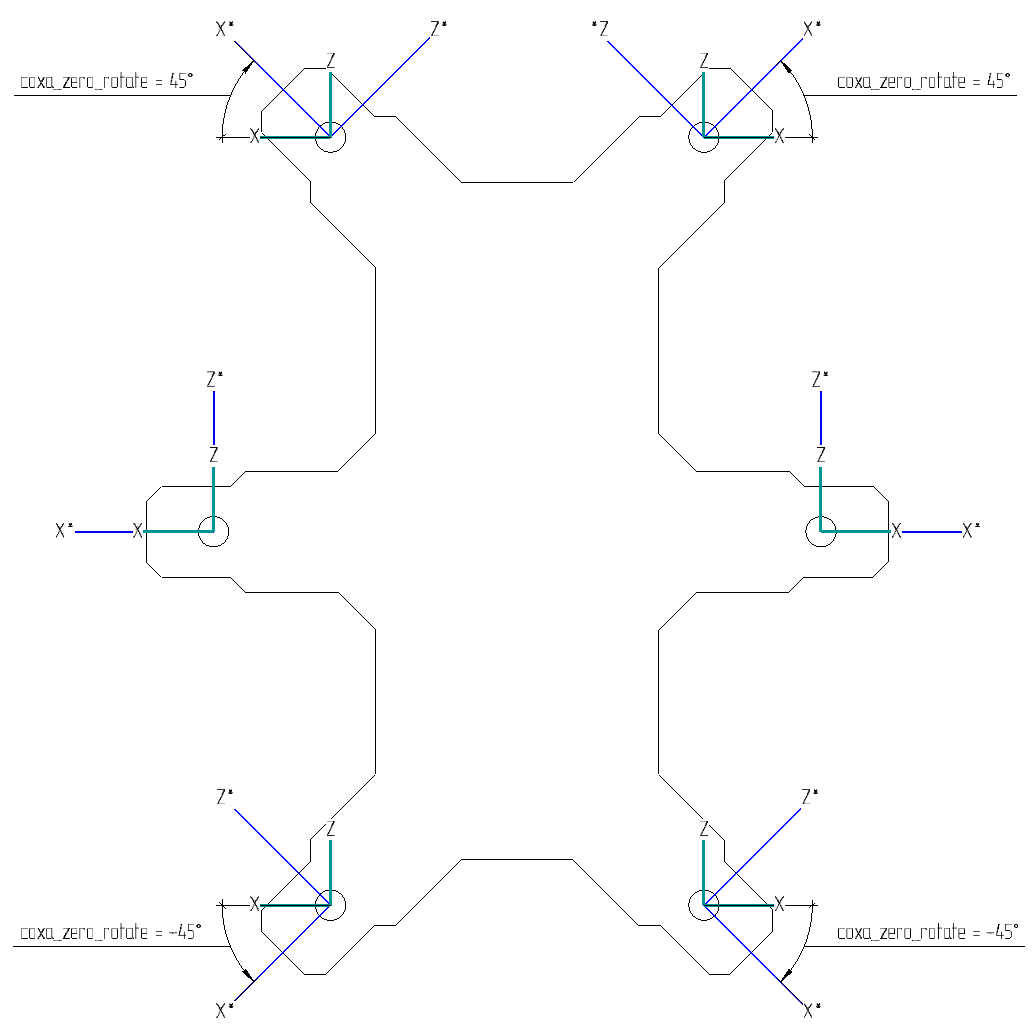
Как вы уже наверно заметили, системы координат на левой и правой сторонах расположены симметрично относительно центра корпуса. Мне показалось, что так будет проще.
Координаты каждой точки задаются относительно той конечности, для которой эта точка предназначена. Такой подход позволит безболезненно перемещать конечность куда угодно не вмешиваясь в конфигурацию.
А вот так они расположены относительно конечности:
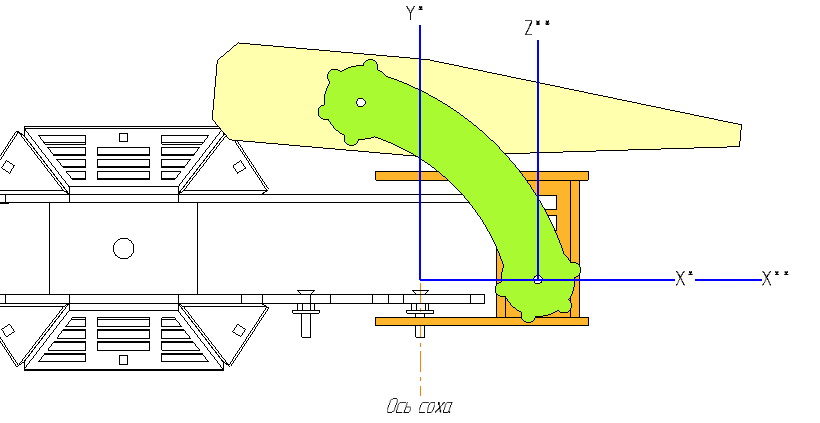
Координаты целевой точки задаются относительно MAIN COORDINATE SYSTEM. Изначально я хотел задавать координаты относительно центра корпуса, но это оказалось не очень удобно и требовало хранения ряда дополнительных параметров.
Далее по тексту обозначения X*, X** и т.д. будут заменены на X′, X′′.
Решение обратной задачи кинематики
Начнем с самого сложного и интересного для меня момента — кинематики. Алгоритм я придумывал сам, иногда поглядывая на свойства треугольника и тригонометрические функции. С механикой у меня тяжко, а с тригонометрией еще хуже, так что возможно я где-то что-то мог не учесть, но этот алгоритм работает (видео в конце).
1. Постановка задачи
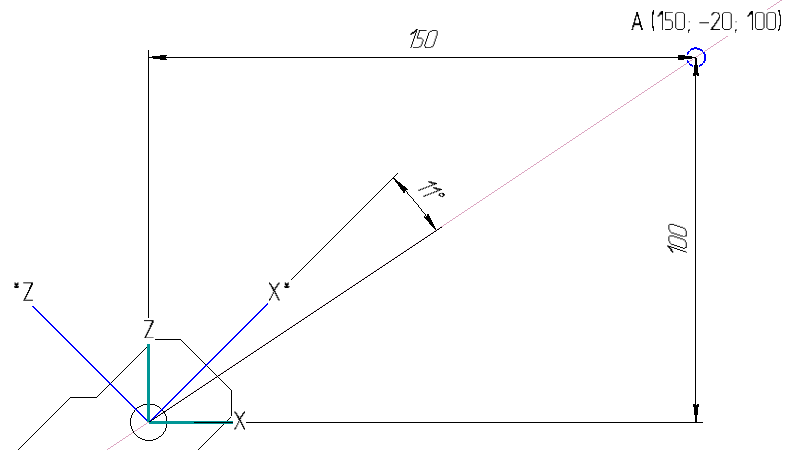
Допустим нам нужно, чтобы передняя правая конечность дотянулась до точки А с координатами (150; -20; 100). Так же известно, что конечность повернута относительно корпуса на 45 градусов (параметр coxa_zero_rotate):

Сама конечность имеет следующие параметры:
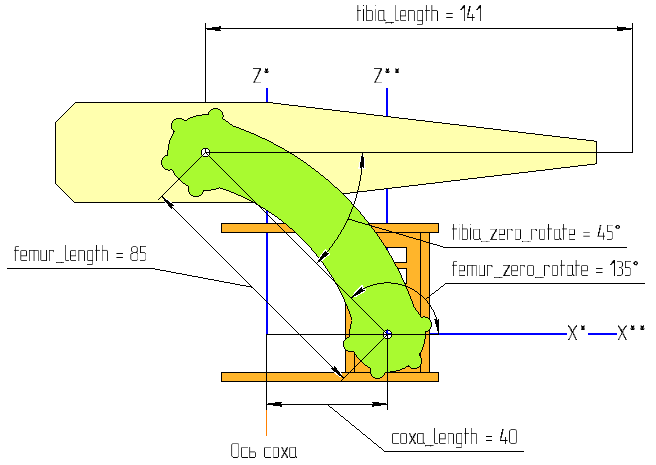
Я думаю не нужно описывать что эти параметры значат, названия говорят сами за себя. Можно добавить только то, что эти все параметры определяются конфигурацией корпуса, являются постоянными и хранятся во FLASH памяти с возможностью редактирования из вне (для гибкости).
Вот зачем это нужно

На картинке представлены различные вариации корпусов и расположения ног гексапода. Сейчас он соответствует конфигурации ARACNID. Предположим мне в голову стукнуло поменять корпус на REPTILES и для этого будет достаточно просто поменять значения параметров без измерения в самой программе, даже целевые точки менять не придется (если конечно грамотно подойти к этому).
На картинке представлены различные вариации корпусов и расположения ног гексапода. Сейчас он соответствует конфигурации ARACNID. Предположим мне в голову стукнуло поменять корпус на REPTILES и для этого будет достаточно просто поменять значения параметров без измерения в самой программе, даже целевые точки менять не придется (если конечно грамотно подойти к этому).
Всех представленных выше параметров достаточно для решения поставленной задачи.
2. Решение задачи
2.1 Нахождение угла поворота COXA
Данный этап является самым простым. Для начала необходимо пересчитать координаты точки А относительно LIMB COORDINATE SYSTEM. Очевидно, что нужно выполнить поворот на угол coxa_zero_rotate, сделать это можно используя следующие формулы:



Таким образом мы получили координаты целевой точки А (176.78; -20; -35.36) относительно LIMB COORDINATE SYSTEM.
Теперь можно найти угол COXA используя функцию atan2:

И так, мы получили угол, на который нужно повернуть сервопривод COXA, чтобы точка А находилась в плоскости X′Y′. Давайте теперь проверим наши расчеты в КОМПАС 3D:
Все верно.
2.2 Нахождение угла поворота FEMUR и TIBIA
Для нахождения этих углов необходимо перейти к плоскости X′Y′. Для перехода к плоскости нужно выполнить поворот точки на угол COXA, который мы уже рассчитали ранее.

Координата y′ не меняется, так как мы выполняем поворот по оси Y′.
Дальше нужно убрать из расчета длину COXA, т.е. перейдем к плоскости X′′Y′′, для этого выполним сдвиг координаты x′ точки на длину COXA:


После всех этих манипуляций дальнейшее решение задачи сводится к нахождению углов a и b треугольника:

Перед нахождением углов необходимо найти третью сторону C этого треугольника. Это расстояние ни что иное как длина вектора и рассчитывается по формуле:

Теперь необходимо выполнить проверку, сможет ли конечность дотянуться до этой точки. Если С больше чем сумма длин FEMUR и TIBIA, то точка является не достижимой. В нашем случае 141.70 < 141 + 85 — точка достижима.
Теперь нам известны все стороны треугольника и можно найти нужные нам углы a и b используя теорему косинусов:


Полученные углы не применимы для скармливания их сервоприводам, так как тут не учитывается начальное положение и угол наклона прямой С к оси X. Если начальные углы FEMUR и TIBIA нам известны (135° и 45°), то угол наклона C к оси X нам не известен. Найти его можно используя функцию atan2(y′′, x′′):

Наконец-то можно рассчитать угол поворота сервоприводов FEMUR и TIBIA:


Давайте проверим наши расчеты:
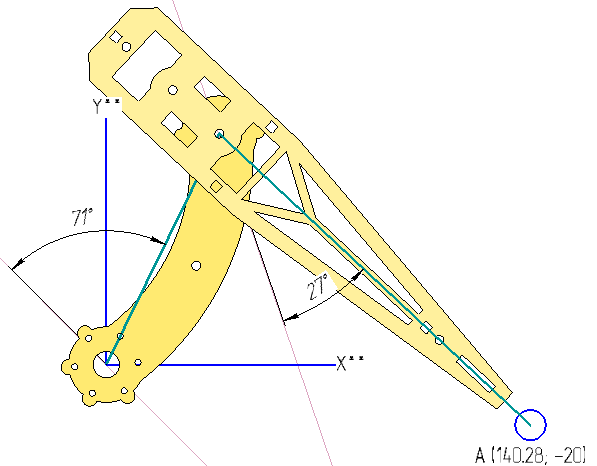
Вроде похоже на правду.
Итог
Рассчитанные углы COXA, FEMUR и TIBIA пригодны для скармливания их сервоприводам. Можно заметить, что угол COXA отрицательный и соответственно возникает вопрос: «А как повернуть привод на -11.3 градуса?». Хитрость состоит в том, что я использую нейтральное положение сервопривода COXA в качестве логического нуля, это позволяет вращать привод как на положительные углы, так и на отрицательные. Это конечно очевидно, но я думаю будет не лишним об этом упомянуть. Более подробно расскажу об этом в следующих статьях, когда буду рассказывать о реализации всего выше упомянутого.
Исходники
Хватит слов, дай гляну код
#define RAD_TO_DEG(rad) ((rad) * 180.0 / M_PI) #define DEG_TO_RAD(deg) ((deg) * M_PI / 180.0) typedef enum { LINK_COXA, LINK_FEMUR, LINK_TIBIA } link_id_t; typedef struct { // Current link state float angle; // Link configuration uint32_t length; int32_t zero_rotate; int32_t min_angle; int32_t max_angle; } link_info_t; typedef struct { point_3d_t position; path_3d_t movement_path; link_info_t links[3]; } limb_info_t; // *************************************************************************** /// @brief Calculate angles /// @param info: limb info @ref limb_info_t /// @return true - calculation success, false - no // *************************************************************************** static bool kinematic_calculate_angles(limb_info_t* info) { int32_t coxa_zero_rotate_deg = info->links[LINK_COXA].zero_rotate; int32_t femur_zero_rotate_deg = info->links[LINK_FEMUR].zero_rotate; int32_t tibia_zero_rotate_deg = info->links[LINK_TIBIA].zero_rotate; uint32_t coxa_length = info->links[LINK_COXA].length; uint32_t femur_length = info->links[LINK_FEMUR].length; uint32_t tibia_length = info->links[LINK_TIBIA].length; float x = info->position.x; float y = info->position.y; float z = info->position.z; // Move to (X*, Y*, Z*) coordinate system - rotate float coxa_zero_rotate_rad = DEG_TO_RAD(coxa_zero_rotate_deg); float x1 = x * cos(coxa_zero_rotate_rad) + z * sin(coxa_zero_rotate_rad); float y1 = y; float z1 = -x * sin(coxa_zero_rotate_rad) + z * cos(coxa_zero_rotate_rad); // // Calculate COXA angle // float coxa_angle_rad = atan2(z1, x1); info->links[LINK_COXA].angle = RAD_TO_DEG(coxa_angle_rad); // // Prepare for calculation FEMUR and TIBIA angles // // Move to (X*, Y*) coordinate system (rotate on axis Y) x1 = x1 * cos(coxa_angle_rad) + z1 * sin(coxa_angle_rad); // Move to (X**, Y**) coordinate system (remove coxa from calculations) x1 = x1 - coxa_length; // Calculate angle between axis X and destination point float fi = atan2(y1, x1); // Calculate distance to destination point float d = sqrt(x1 * x1 + y1 * y1); if (d > femur_length + tibia_length) { return false; // Point not attainable } // // Calculate triangle angles // float a = tibia_length; float b = femur_length; float c = d; float alpha = acos( (b * b + c * c - a * a) / (2 * b * c) ); float gamma = acos( (a * a + b * b - c * c) / (2 * a * b) ); // // Calculate FEMUR and TIBIA angle // info->links[LINK_FEMUR].angle = femur_zero_rotate_deg - RAD_TO_DEG(alpha) - RAD_TO_DEG(fi); info->links[LINK_TIBIA].angle = RAD_TO_DEG(gamma) - tibia_zero_rotate_deg; // // Check angles // if (info->links[LINK_COXA].angle < info->links[LINK_COXA].min_angle || info->links[LINK_COXA].angle > info->links[LINK_COXA].max_angle) { return false; } if (info->links[LINK_FEMUR].angle < info->links[LINK_FEMUR].min_angle || info->links[LINK_FEMUR].angle > info->links[LINK_FEMUR].max_angle) { return false; } if (info->links[LINK_TIBIA].angle < info->links[LINK_TIBIA].min_angle || info->links[LINK_TIBIA].angle > info->links[LINK_TIBIA].max_angle) { return false; } return true; }
Алгоритм в действии
Тут случайно получилась последовательность, чем-то напоминающая танец
P.S.
Буду рад если кто-нибудь сможет упростить этот алгоритм. Я делал его таким, чтобы понять его спустя, допустим, пол года.
