
SciPy (произносится как сай пай) — это пакет прикладных математических процедур, основанный на расширении Numpy Python. С SciPy интерактивный сеанс Python превращается в такую же полноценную среду обработки данных и прототипирования сложных систем, как MATLAB, IDL, Octave, R-Lab и SciLab. Сегодня я хочу коротко рассказать о том, как следует применять некоторые известные алгоритмы оптимизации в пакете scipy.optimize. Более подробную и актуальную справку по применению функций всегда можно получить с помощью команды help() или с помощью Shift+Tab.
Введение
Дабы избавить самого себя и читателей от поиска и чтения первоисточников, ссылки на описания методов будут в основном на википедию. Как правило, этой информации достаточно для понимания методов в общих чертах и условий их применения. Для понимания сути математических методов идем по ссылкам на более авторитетные публикации, которые можно найти в конце каждой статьи или в любимой поисковой системе.
Итак, модуль scipy.optimize включает в себя реализацию следующих процедур:
- Условной и безусловной минимизации скалярных функций нескольких переменных (minim) с помощью различных алгоритмов (симплекс Нелдера-Мида, BFGS, сопряженных градиентов Ньютона, COBYLA и SLSQP)
- Глобальной оптимизации (например: basinhopping, diff_evolution)
- Минимизация остатков МНК (least_squares) и алгоритмы подгонки кривых нелинейным МНК (curve_fit)
- Минимизации скалярной функций одной переменной (minim_scalar) и поиска корней (root_scalar)
- Многомерные решатели системы уравнений (root) с использованием различных алгоритмов (гибридный Пауэлла, Левенберг-Марквардт или крупномасштабные методы, такие как Ньютона-Крылова).
В этой статье мы рассмотрим только первый пункт из всего этого списка.
Безусловная минимизация скалярной функции нескольких переменных
Функция minim из пакета scipy.optimize предоставляет общий интерфейс для решения задач условной и безусловной минимизации скалярных функций нескольких переменных. Чтобы продемонстрировать ее работу, нам понадобится подходящая функция нескольких переменных, которую мы будем по-разному минимизировать.
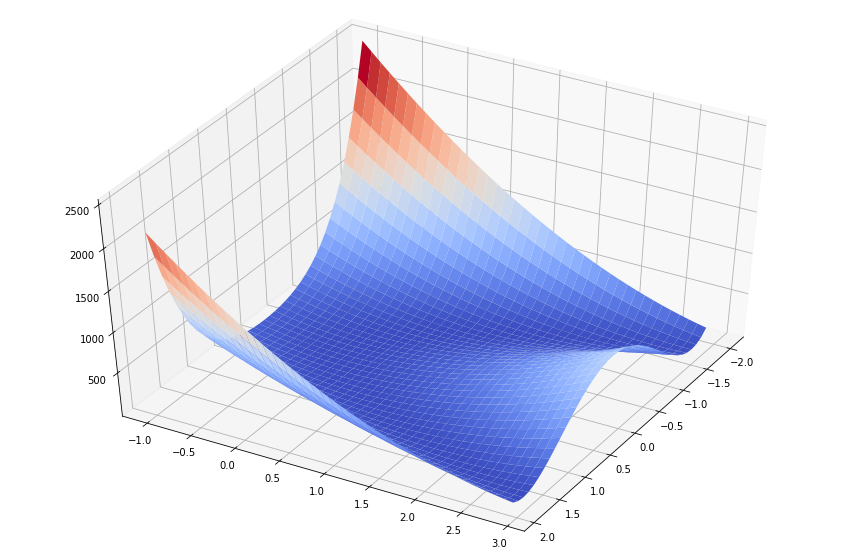
Для этих целей прекрасно подойдет функция Розенброка от N переменных, которая имеет вид:
![$f\left(\mathbf{x}\right)=\sum_{i=1}^{N-1}[100\left(x_{i+1}-x_{i}^{2}\right)^{2}+\left(1-x_{i}\right)^{2}]$](https://habrastorage.org/getpro/habr/formulas/784/449/860/784449860a3ffca5f3558ffbbbad019f.svg)
Несмотря на то, что функция Розенброка и ее матрицы Якоби и Гессе (первой и второй производной соответственно) уже определены в пакете scipy.optimize, определим ее самостоятельно.
import numpy as np
def rosen(x):
"""The Rosenbrock function"""
return np.sum(100.0*(x[1:]-x[:-1]**2.0)**2.0 + (1-x[:-1])**2.0, axis=0)Для наглядности отрисуем в 3D значения функции Розенброка от двух переменных.
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.pyplot as plt
from matplotlib import cm
from matplotlib.ticker import LinearLocator, FormatStrFormatter
# Настраиваем 3D график
fig = plt.figure(figsize=[15, 10])
ax = fig.gca(projection='3d')
# Задаем угол обзора
ax.view_init(45, 30)
# Создаем данные для графика
X = np.arange(-2, 2, 0.1)
Y = np.arange(-1, 3, 0.1)
X, Y = np.meshgrid(X, Y)
Z = rosen(np.array([X,Y]))
# Рисуем поверхность
surf = ax.plot_surface(X, Y, Z, cmap=cm.coolwarm)
plt.show()
Зная заранее, что минимум равен 0 при  , рассмотрим примеры того, как определить минимальное значение функции Розенброка с помощью различных процедур scipy.optimize.
, рассмотрим примеры того, как определить минимальное значение функции Розенброка с помощью различных процедур scipy.optimize.
Симплекс-метод Нелдера-Мида (Nelder-Mead)
Пусть имеется начальная точка x0 в 5-мерном пространстве. Найдем ближайшую к ней точку минимума функции Розенброка с помощью алгоритма симплекса Nelder-Mead (алгоритм указан в качестве значения параметра method):
from scipy.optimize import minimize
x0 = np.array([1.3, 0.7, 0.8, 1.9, 1.2])
res = minimize(rosen, x0, method='nelder-mead',
options={'xtol': 1e-8, 'disp': True})
print(res.x)Optimization terminated successfully.
Current function value: 0.000000
Iterations: 339
Function evaluations: 571
[1. 1. 1. 1. 1.]Симплекс-метод является самым простым способом свести к минимуму явно определенную и довольно гладкую функцию. Он не требует вычисления производных функции, достаточно задать только ее значения. Метод Нелдера-Мида является хорошим выбором для простых задач минимизации. Однако, поскольку он не использует оценки градиента, для поиска минимума может потребоваться больше времени.
Метод Пауэлла
Другим алгоритмом оптимизации, в котором вычисляются только значения ��ункций, является метод Пауэлла. Чтобы использовать его, нужно установить method = 'powell' в функции minim.
x0 = np.array([1.3, 0.7, 0.8, 1.9, 1.2])
res = minimize(rosen, x0, method='powell',
options={'xtol': 1e-8, 'disp': True})
print(res.x)Optimization terminated successfully.
Current function value: 0.000000
Iterations: 19
Function evaluations: 1622
[1. 1. 1. 1. 1.]Алгоритм Бройдена-Флетчера-Голдфарба-Шанно (BFGS)
Для получения более быстрой сходимости к решению, процедура BFGS использует градиент целевой функции. Градиент может быть задан в виде функции или вычисляться с помощью разностей первого порядка. В любом случае, обычно метод BFGS требует меньше вызовов функций, чем симплекс-метод.
Найдем производную от функции Розенброка в аналитическом виде:


Это выражение справедливо для производных всех переменных, кроме первой и последней, которые определяются как:


Посмотрим на функцию Python, которая вычисляет этот градиент:
def rosen_der (x):
xm = x [1: -1]
xm_m1 = x [: - 2]
xm_p1 = x [2:]
der = np.zeros_like (x)
der [1: -1] = 200 * (xm-xm_m1 ** 2) - 400 * (xm_p1 - xm ** 2) * xm - 2 * (1-xm)
der [0] = -400 * x [0] * (x [1] -x [0] ** 2) - 2 * (1-x [0])
der [-1] = 200 * (x [-1] -x [-2] ** 2)
return derФункция вычисления градиента указывается в качестве значения параметра jac функции minim, как показано ниже.
res = minimize(rosen, x0, method='BFGS', jac=rosen_der, options={'disp': True})
print(res.x)Optimization terminated successfully.
Current function value: 0.000000
Iterations: 25
Function evaluations: 30
Gradient evaluations: 30
[1.00000004 1.0000001 1.00000021 1.00000044 1.00000092]Алгоритм сопряженных градиентов (Ньютона)
Алгоритм сопряженных градиентов Ньютона является модифицированным методом Ньютона.
Метод Ньютона основан на аппроксимации функции в локальной области полиномом второй степени:

где  является матрицей вторых производных (матрица Гессе, гессиан).
является матрицей вторых производных (матрица Гессе, гессиан).
Если гессиан положительно определен, то локальный минимум этой функции можно найти, приравняв нулевой градиент квадратичной формы к нулю. В результате получится выражение:

Обратный гессиан вычисляется с помощью метода сопряженных градиентов. Пример использования этого метода для минимизации функции Розенброка приведен ниже. Чтобы использовать метод Newton-CG, необходимо задать функцию, которая вычисляет гессиан.
Гессиан функции Розенброка в аналитическом виде равен:


где ![$i, j \in \left[ 1, N-2 \right]$](https://habrastorage.org/getpro/habr/formulas/8a8/a86/cb5/8a8a86cb5078ae844f780ad9161fbab0.svg) и
и ![$i, j \in \left [0, N-1 \right]$](https://habrastorage.org/getpro/habr/formulas/ada/f46/8ef/adaf468ef33429746850c180b06d50f8.svg) , определяют матрицу
, определяют матрицу  .
.
Остальные ненулевые элементы матрицы равны:




Например, в пятимерном пространстве N = 5, матрица Гессе для функции Розенброка имеет ленточный вид:

Код, который вычисляет этот гессиан вместе с кодом для минимизации функции Розенброка с помощью метода сопряженных градиентов (Ньютона):
def rosen_hess(x):
x = np.asarray(x)
H = np.diag(-400*x[:-1],1) - np.diag(400*x[:-1],-1)
diagonal = np.zeros_like(x)
diagonal[0] = 1200*x[0]**2-400*x[1]+2
diagonal[-1] = 200
diagonal[1:-1] = 202 + 1200*x[1:-1]**2 - 400*x[2:]
H = H + np.diag(diagonal)
return H
res = minimize(rosen, x0, method='Newton-CG',
jac=rosen_der, hess=rosen_hess,
options={'xtol': 1e-8, 'disp': True})
print(res.x)Optimization terminated successfully.
Current function value: 0.000000
Iterations: 24
Function evaluations: 33
Gradient evaluations: 56
Hessian evaluations: 24
[1. 1. 1. 0.99999999 0.99999999]Пример с определением функции произведения гессиана и произвольного вектора
В реальных задачах вычисление и хранение всей матрицы Гессе может потребовать значительных ресурсов времени и памяти. При этом фактически нет н��обходимости задавать саму матрицу Гессе, т.к. для процедуры минимизации нужен только вектор, равный произведению гессиана с другим произвольным вектором. Таким образом, с вычислительной точки зрения намного предпочтительней сразу определить функцию, которая возвращает результат произведения гессиана с произвольным вектором.
Рассмотрим функцию hess, которая принимает вектор минимизации в качестве первого аргумента, а произвольный вектор — как второй аргумент (наряду с другими аргументами минимизируемой функции). В нашем случае вычислить произведение гессиана функции Розенброка с произвольным вектором не очень сложно. Если p — произвольный вектор, то произведение  имеет вид:
имеет вид:

Функция, вычисляющая произведение гессиана и произвольного вектора, передается как значение аргумента hessp функции minimize:
def rosen_hess_p(x, p):
x = np.asarray(x)
Hp = np.zeros_like(x)
Hp[0] = (1200*x[0]**2 - 400*x[1] + 2)*p[0] - 400*x[0]*p[1]
Hp[1:-1] = -400*x[:-2]*p[:-2]+(202+1200*x[1:-1]**2-400*x[2:])*p[1:-1] \
-400*x[1:-1]*p[2:]
Hp[-1] = -400*x[-2]*p[-2] + 200*p[-1]
return Hp
res = minimize(rosen, x0, method='Newton-CG',
jac=rosen_der, hessp=rosen_hess_p,
options={'xtol': 1e-8, 'disp': True})
Optimization terminated successfully.
Current function value: 0.000000
Iterations: 24
Function evaluations: 33
Gradient evaluations: 56
Hessian evaluations: 66Алгоритм доверительной области (trust region) сопряженных градиентов (Ньютона)
Плохая обусловленность матрицы Гессе и неверные направления поиска могут привести к тому, что алгоритм сопряженных градиентов Ньютона может быть неэффективным. В таких случаях предпочтение отдается методу доверительной области (trust-region) сопряженных градиентов Ньютона.
Пример с определением матрицы Гессе:
res = minimize(rosen, x0, method='trust-ncg',
jac=rosen_der, hess=rosen_hess,
options={'gtol': 1e-8, 'disp': True})
print(res.x)Optimization terminated successfully.
Current function value: 0.000000
Iterations: 20
Function evaluations: 21
Gradient evaluations: 20
Hessian evaluations: 19
[1. 1. 1. 1. 1.]Пример с функцией произведения гессиана и произвольного вектора:
res = minimize(rosen, x0, method='trust-ncg',
jac=rosen_der, hessp=rosen_hess_p,
options={'gtol': 1e-8, 'disp': True})
print(res.x)Optimization terminated successfully.
Current function value: 0.000000
Iterations: 20
Function evaluations: 21
Gradient evaluations: 20
Hessian evaluations: 0
[1. 1. 1. 1. 1.]Методы Крыловского типа
Подобно методу trust-ncg, методы Крыловского типа хорошо подходят для решения крупномасштабных задач, поскольку в них используется только матрично-векторные произведения. Их суть в решении задачи в доверительной области, ограниченной усеченным подпространством Крылова. Для неопределенных задач лучше использовать этот метод, так как он использует меньшее количество нелинейных итераций за счет меньшего количества матрично-векторных произведений на одну подзадачу, по сравнению с методом trust-ncg. Кроме того, решение квадратичной подзадачи находится более точно, чем методом trust-ncg.
Пример с определением матрицы Гессе:
res = minimize(rosen, x0, method='trust-krylov',
jac=rosen_der, hess=rosen_hess,
options={'gtol': 1e-8, 'disp': True})
Optimization terminated successfully.
Current function value: 0.000000
Iterations: 19
Function evaluations: 20
Gradient evaluations: 20
Hessian evaluations: 18
print(res.x)
[1. 1. 1. 1. 1.]
Пример с функцией произведения гессиана и произвольного вектора:
res = minimize(rosen, x0, method='trust-krylov',
jac=rosen_der, hessp=rosen_hess_p,
options={'gtol': 1e-8, 'disp': True})
Optimization terminated successfully.
Current function value: 0.000000
Iterations: 19
Function evaluations: 20
Gradient evaluations: 20
Hessian evaluations: 0
print(res.x)
[1. 1. 1. 1. 1.]
Алгоритм приближенного решения в доверительной области
Все методы (Newton-CG, trust-ncg и trust-krylov) хорошо подходят для решения крупномасштабных задач (с тысячами переменных). Это связано с тем, что лежащий в их основе алгоритм сопряженных градиентов подразумевает приближенное нахождение обратной матрицы Гессе. Решение находится итеративно, без явного разложения гессиана. Поскольку требуется определить только функцию для произведение гессиана и произвольного вектора, этот алгоритм особенно хорош для работы с разреженными (ленточными диагональными) матрицами. Это обеспечивает низкие затраты памяти и значительную экономию времени.
В задачах среднего размера затраты на хранение и факторизацию гессиана не имеют решающего значения. Это значит, чт�� можно получить решение за меньшее количество итераций, разрешив подзадачи области доверия почти точно. Для этого некоторые нелинейные уравнения решаются итеративно для каждой квадратичной подзадачи. Такое решение требует обычно 3 или 4 разложения Холецкого матрицы Гессе. В результате метод сходится за меньшее количество итераций и требует меньше вычислений целевой функции, чем другие реализованные методы доверительной области. Этот алгоритм подразумевает только определение полной матрицы Гессе и не поддерживает возможность использовать функцию произведения гессиана и произвольного вектора.
Пример с минимизацией функции Розенброка:
res = minimize(rosen, x0, method='trust-exact',
jac=rosen_der, hess=rosen_hess,
options={'gtol': 1e-8, 'disp': True})
res.xOptimization terminated successfully.
Current function value: 0.000000
Iterations: 13
Function evaluations: 14
Gradient evaluations: 13
Hessian evaluations: 14
array([1., 1., 1., 1., 1.])На этом, пожалуй, остановимся. В следующей статье постараюсь рассказать самое интересное об условной минимизации, приложении минимизации в решении задач аппроксимации, минимизации функции одной переменной, произвольных минимизаторах и поиске корней системы уравнений с помощью пакета scipy.optimize.
