Comments 21
IMHO, пока что единственное достоинство воздушного старта — возможность оперативно менять точку запуска, и, соответственно, наклонение орбиты.
Даже небольшой новозеландский Электрон со стартовой массой 12.5 тонны выводит 250 кг на НОО, а тут всего сотня кг на гораздо более сложном носителе.
Вот когда научатся разгонять дрон-носитель до нормальных 2 км/с, чтобы он мог полностью заменить первую ступень, вот тогда и посмотрим.
Даже небольшой новозеландский Электрон со стартовой массой 12.5 тонны выводит 250 кг на НОО, а тут всего сотня кг на гораздо более сложном носителе.
Вот когда научатся разгонять дрон-носитель до нормальных 2 км/с, чтобы он мог полностью заменить первую ступень, вот тогда и посмотрим.
Тут преимущество в многоразовости. Заправил самолет и запускай новую ракету. Хоть 10 штук за день.
Так всё равно нужно 10 ракет, а параметры ракеты, которую сей агрегат запускает, мало отличаются от параметров обычных ракет лёгкого класса, стартующих прямо с земли.
Для настоящей многоразовости нужен полный аналог первой ступени, то есть разделение должно происходить на высоте 70-80 км и скорости 2-2.5 км/с.
Для настоящей многоразовости нужен полный аналог первой ступени, то есть разделение должно происходить на высоте 70-80 км и скорости 2-2.5 км/с.
Нужно 10 ракет второй ступени. Скорость отделения можно увеличить до 2.55М с системой MIPCC.
Всё равно надо чем-то доразогнать ракету с 0.85 до 2 км/с и поднять с 20 до 70 км прежде, чем запускать последнюю ступень.
Так что вместо двухступенчатого электрона вы получите трёхступенчатую систему, где вторая ступень практически аналогична первой ступени электрона.
Так что вместо двухступенчатого электрона вы получите трёхступенчатую систему, где вторая ступень практически аналогична первой ступени электрона.
Первую ступеть(самолет) будут разгонять до 2.5М с модифицированным двигателем.
2.55М (маха) это две с половиной скорости звука, всего лишь 0.85 км/с.
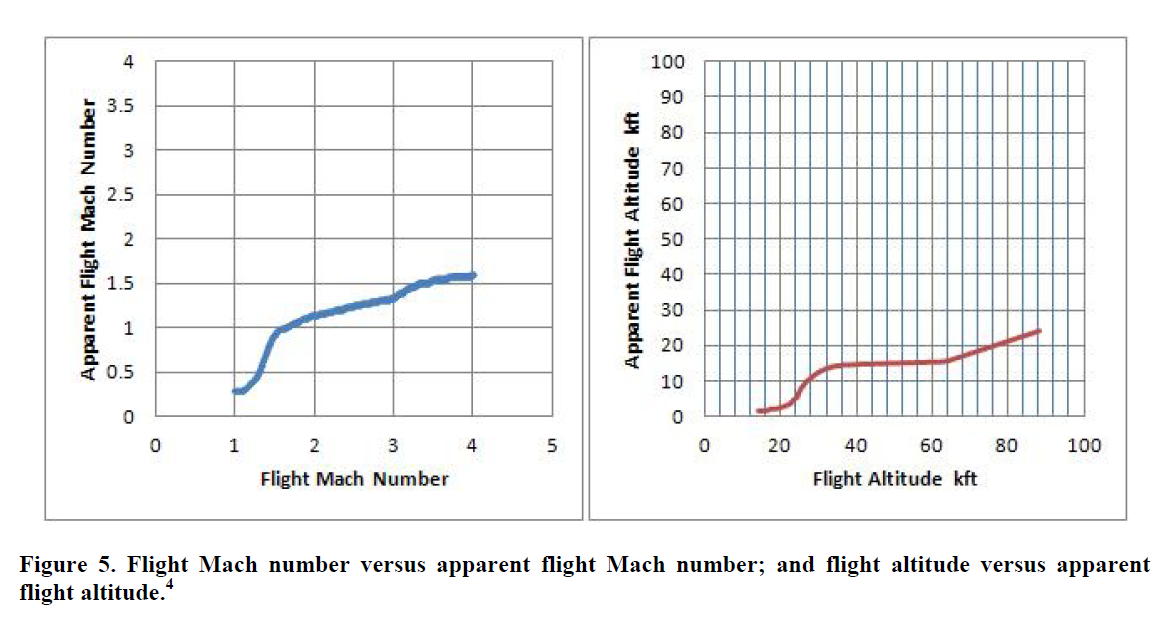
Тут все неоднозначно, т.к НАСА рассматривало разные варианты системы предохлаждения. В одном из вариантов удалось достичь точки M = 4, H = 24 км. Проблема в том, что в доступных материалах не указано, какой именно хладоагент используется и с каким расходом.
MIPCC в любом случае роняет удельный импульс. Вопрос в том, какие модификации еще нужны, чтобы достичь хотя бы M=5 и не породить монстра a-la «Скайлон»
MIPCC в любом случае роняет удельный импульс. Вопрос в том, какие модификации еще нужны, чтобы достичь хотя бы M=5 и не породить монстра a-la «Скайлон»
Для полного отказа от промежуточной ступени надо, хотя бы, 6М. Это уже гиперзвук со своими проблемами.
Тут есть свои решения, отработанные еще в 60-ые годы прошлого века (X-7, X-15). Поскольку цель — разгон со сбросом нагрузки и маневром торможения/ смены курса, то время движения со скоростями M ~ 5-6 ограничено минутами, и это делает допустимым конструкции из жаропрочных сталей, в которых избыток тепла компенсируется дополнительными толщинами обшивки в местах нагрева (кстати, первая ступень BFR тоже из «голой» жаропрочки)
Это не решения данной проблемы. X-15 это ракетный самолет, то есть никакой «заменой предыдущей ступени» он быть не может, он и есть ракетная ступень. У X-7 двигатель действительно воздушно-реактивный и почти гиперзвуковой, но с ним проблема другая, он на низких скоростях не работал и сперва разгонялся до рабочей скорости твердотопливным ускорителем, то есть с точки зрения «ступени ракеты» он был бы бесполезен. Причем эта проблема так и не решена, современные гиперзвуковые двигатели все так же разгоняются до рабочей скорости ракетными двигателями.
Решения с точки зрения материалов и теплозащиты в виде «горячей» конструкции из жаропрочки (X-7) и инконеля (X-15), системы компенсации тепловых расширений и теплоизоляции (минеральный фетр Q-felt, к примеру).
+ На X-15 применялось наносимое абляционное покрытие/краска для миссий с M = 6,5 — 6,8.
Что касается двигателей — пока здесь темный лес. Решение должно лежать где-то среди двигателей комбинированного цикла (RBCC/TBCC), в 50-60-ые годы проводились разработки турбопрямоточных двигателей(XF-103, к примеру), но с появлением управляемого ракетного вооружения эти разработки свернулись (т.к по экономичности «комбинации» проигрывали классическим ТРД)
+ На X-15 применялось наносимое абляционное покрытие/краска для миссий с M = 6,5 — 6,8.
Что касается двигателей — пока здесь темный лес. Решение должно лежать где-то среди двигателей комбинированного цикла (RBCC/TBCC), в 50-60-ые годы проводились разработки турбопрямоточных двигателей(XF-103, к примеру), но с появлением управляемого ракетного вооружения эти разработки свернулись (т.к по экономичности «комбинации» проигрывали классическим ТРД)
Электрон — не самая простая ракета, чего стоит хотя бы корпус из дорогого и трудоемкого углепластика. Насчет скорости — реально (ценой перехода от классического ТРД к двигателям комбинированного цикла), насчет высоты — нет (потому что выше ~ 40 км атмосфера слишком разреженная для ВРД)
Так многоразовые ракеты оказались более ресурсоэффективным и работоспособным вариантом. И у них есть главное преимущество — expandable mode, когда можно вывести больше, дальше и тяжелее просто отказавшись от спасения ступени.
Для классических ракет есть проблема спасения/транспортировки ступени с места посадки на место обслуживания. Вплоть до затратных и сложных операций подхвата в воздухе или посадки на позиционируемую платформу(привет, Фалькон). И наличие развитой аэродинамики решает как задачу посадки (с повторным заходом), так и перебазирование с аэродрома возврата на основной аэродром.
Единственный вопрос — перегоночная дальность с движком комбинированного цикла, импульс которого хуже классического ТРД
Единственный вопрос — перегоночная дальность с движком комбинированного цикла, импульс которого хуже классического ТРД
Вот, даже для ракет эта процедура дорогая. А представьте во сколько обойдётся добавление к ракете самолёта. Это намного дороже баржи в океане. Усложняется конструкция ракеты, которой надо выдерживать горизонтальный полёт, самолёт-носитель тоже дорогущий получается. Ему ведь надо 3+ маха сделать на 20+км чтобы был вообще смысл эту штуку разгонять, учитывая дельту первой ступени около 2000м/с, если сэкономить 300м/с это ничего не даст практически.
У меня большие подозрения, что эти штуки не для вывода теплых ламповых спутников лёгкого класса, сделанных кружком студентов. Их полезная нагрузка и сценарий использования очень хорошо укладывается в параметры ракет для сбития чужих спутников.
Возможность оперативно запустить ракету из нужной точки, то есть с нужным наклонением, для военных очень ценная. Но достаточный ли запас топлива у этого дрона, чтобы пролететь хотя бы 1000 км от аэродрома до места старта ракеты (9° по меридиану) и вернуться обратно после разделения.
Маленькие спутники ДЗЗ нужны всем, и студентам, и зеленым (серым/бурым/цвета хаки) человечкам. Группировки большие, срок жизни мелочи вроде Dove — порядка года, обновлять нужно часто
Смысл такого носителя для военных — готовность пуска в течение 6 часов. Но, это будет дорого, ибо нужно держать в постоянной готовности.
Воздушный старт дает несколько преимуществ:
Энергетика самолета-носителя в виде достигнутой высоты и скорости добавляется к энергетике ракеты-носителя;
Ракетная ступень начинает работу в более разреженной атмосфере, испытывает меньшее аэродинамическое сопротивление, ракетный двигатель работает с меньшими потерями на противодавление;
Самолет-носитель может доставить ракетную ступень в точку старта над океаном или малонаселенными территориями, азимут пуска меньше привязан к доступным полям отчуждения.
По моему всё кроме 3) — совершенно не оправдывает всей этой сложности. Скорость разделения — сущие проценты от первой космической, высота тоже даёт очень маленькую выгоду так как основной расход топлива — на достижения скорости.
Лучшие реализованные примеры воздушного старта — сверхлегкая РН Pegasus/Pegasus-XL (~ 20т стартового веса, 250 кг на ССО высотой в 500 км).
Если учесть, что это одна из самых дорогих ракет по стоимости вывода килограмма груза — то так себе пример.
Sign up to leave a comment.
От воздушного старта — к многоразовой первой ступени. Часть 1. Текущее состояние