Comments 56
Про опрос. Катался на буханке без усилителя руля - непередаваемые ощущения на всю жизнь. Представляю, какие надо иметь накачанные руки, чтобы этим на постоянке управлять.
Это ладно. Я сел в буханку после другого отечественного автопрома - там усилителя руля тоже не было. Мои самые яркие впечатления - это педаль газа, на которую надо реально нажимать и сумасшедшая раскачка машины на ровном асфальте. По полю ехать реально проще, чем по асфальту. Я до сих пор с непониманием смотрю на тех, кто едет на ней хотя бы 80. Это же какое единение с машиной!
Но в целом у меня нет к ней ни малейших претензий. Для своих целей отличная машина. В частности тот УАЗ фермер, на котором я катался - очень кстати в хозяйстве пришелся. И аналогов ему наверное нет до сих пор.
Там быстро привыкаешь меньше крутить его на месте, я в свои 14 с ним справлялся на груженом «головастике», по деревне навоз возили. Хотя комплекция моя не особо)
На уазе относительно нормальный руль. Просто крутить на месте не следует.
Прикольней, когда вакуумника на тормозах нету.
Рулевое управление в духе 30-х годов прошлого века, когда про угол Аккермана ещё только начали задумываться. У буханки оба поворотных колеса поворотной оси всегда в горизонтальной плоскости имеют один угол относительно продольной оси. Её не рассчитывали на длительную эксплуатацию по дорогам с твёрдым покрытием, поэтому при повороте колёс физика просто борется с рулевым управлением. Но с завода они комплектовались всегда резиной сомнительного качества, что компенсировало плохо просчитанную геометрию, поэтому руль в движении вполне себе поворачивается. И это же позволяло использовать одинаковые мосты для изделий с разной колёсной базой: рулевое управление ведёт себя одинаково плохо везде. А уменьшение ресурса рулевых наконечников из-за высокой нагрузки компенсировался возможностью обслуживания рулевых наконечников (они были разборными и имели вентиль для нагнетания смазки, при износе можно было заменить вкладыш и обновить смазку).
Но в пользу конструктора могу сказать, что многие производители внедорожников тоже годов до 80-х практиковали такие решения.
Надо быть Халком чтобы управлять Буханкой.
Видели какой я большой? Я на жиге на месте руль крутил и стал таким!!!
Катался на буханке без усилителя руля - непередаваемые ощущения на всю жизнь. Представляю, какие надо иметь накачанные руки, чтобы этим на постоянке управлять.
Это проявляется не только в российском автопроме. В авиации были самолеты тоже без гидроусилителя. Например Ил-4 (Голубь Мира).
Летчики Ил-4 после приземления вываливались из кабины без сил и теряли сознание.
Почему выбрали именно инфракрасное управление? По радиосвязи дальность больше и не нужна прямая видимость.
Без прямой видимости буде сложно. Мадам паркуется по звуку? (Ц)
ИК реализовать проще всего так как кругом полно готовых пультов.
Телевизорный пульт для управления автомобилем - максимально неподходящий из готовых.
Зато на нем 49 кнопок
А нужен контроллер с рулем и педалями. Да, для телевизора он будет максимально неудобный ;)
Разработчик может позже решить расширить функционал. Типа: миниатюрный руль в кабине крутится, рычаг КПП ходит, стрелки на приборной панели шевелятся (при помощи SSD1306), сирена включается, если пошевелить, когда неподвижно стоит, лебёдка трос наматывает, и так далее. Или добавить режим работы по заранее набранной программе, как на Электронике ИМ-11. Как раз возможности пульта с большим количеством кнопок будут раскрыты.
Типа: миниатюрный руль в кабине крутится, рычаг КПП ходит, стрелки на приборной панели шевелятся
Очень смешно. Это же модель. Вы предлагаете какие-то нанотехнологи.


А нужен контроллер с рулем и педалями.
Как же тогда катать модель на улице?
Возрождение отечественного автопрома. Начало. /sarcasm
Как по мне надо просто брать старые советские автомобили (волги, москвичи, оки) и делать их на новом техпроцессе: карбоновый корпус, электрическая тяга, CAN-FD.
Нельзя. В тех машинах нет места под аккумулятор.
Ну хотя бы на бензине. Лишь бы из карбона и с нормальной электроникой.
+ автономное вождение
Лишь бы из карбона
Отвратительный материал. Не варится, не рихтуется. В случае чего - под замену.
с нормальной электроникой
А что там не так? нормальная электроника ;)
автономное вождение
От старого советского автомобиля останется чуть менее чем ничего ;)
что там не так? нормальная электроника
ECU для форсунок вместо карбюратора, автоматическая коробка передач, АБС, ESP. Стеклоопускатели, подушка безопасности, телематика.
Can-fd, Automotive Ethernet, a2b.
Не варится, не рихтуется. В случае чего - под замену.
Это не баг. Это фича.
Карбоновые детали можно лупить кувалдой и они восстанавливают свою форму.
От старого советского автомобиля останется чуть менее чем ничего ;)
Останется дизайн. Внешний вид. Аэродинамика.
Управлять такой машинкой на тротуарах это то же, что играть в GTA 3.
Теперь то же самое, но с настоящей буханкой :)
в опросе не хватает:
[x] - мне нравятся мнемосхемы автора!
Это не мои схемы.
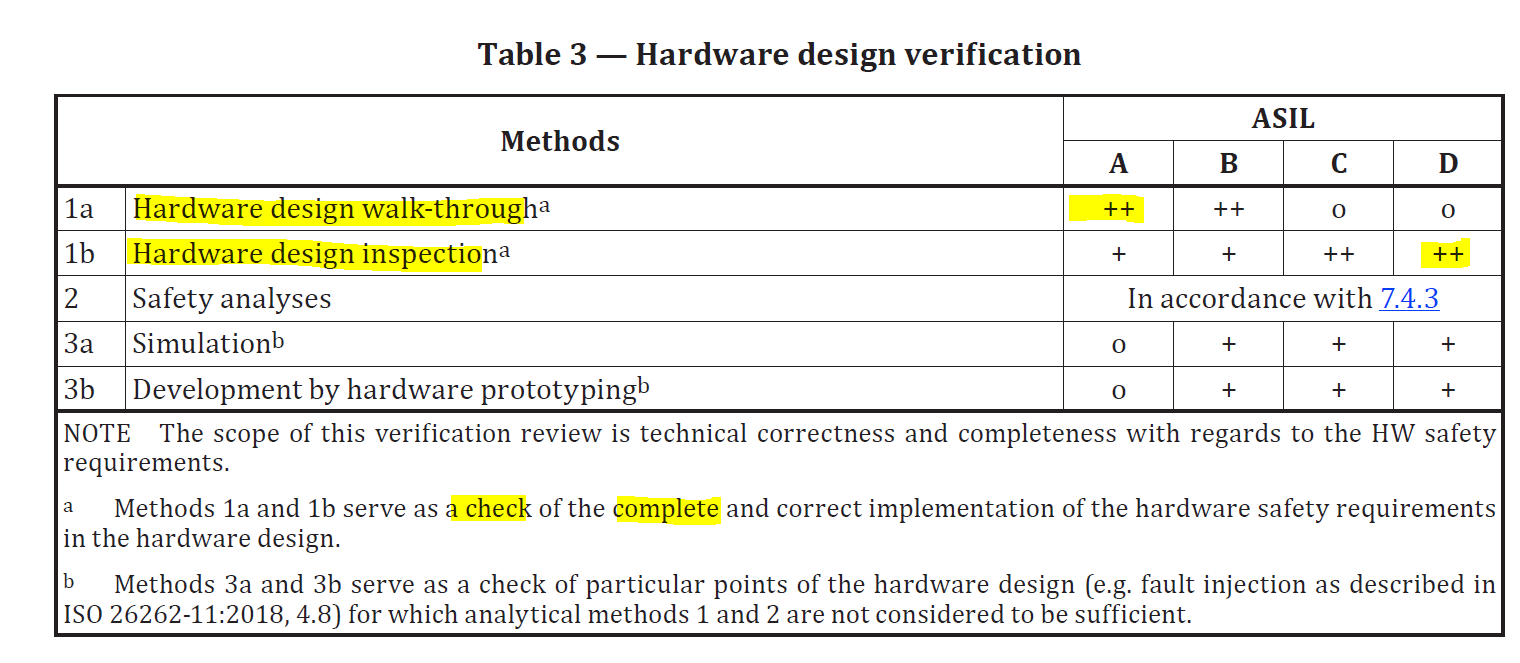
Инспекция аппаратного дизайна это требование международного автомобильного стандарта функциональной безопасности продукта ISO26262-5
это обсуждается тут
Правила Хорошей Структурной Схемы для Электронных Платhttps://habr.com/ru/articles/667030/
Все кто в своей жизни программировали хоть что-то сложнее очередного пресловутого СКУД-а знают что такое ISO-26262
1--Надо подавить питание на MCU со всех сторон. У MCU не случайно несколько пинов VCC.
а на примененной вами "DevEBox_STM32F4XX_M_V3_0" этот момент не учтен?
Ей бы для пущего реализма полный привод, причём подключаемый, и такой, чтобы в моноприводном режиме не прокручивать вхолостую его механизмы, что означает отсутствие индивидуального электропривода и применение раздаточной коробки с муфтой отключения привода переднего моста.
Сам хочу построить действующую модель тросового экскаватора типа ЭО-5111Б, проблема в том, что для реализма требуется возможность свободного вращения двух лебёдочных барабанов, чтобы например, можно было забросить с размаху ковш драглайна или пользоваться шар-бабой как в "Ну, погоди!". Проблема в реализации этой функции, в идеале должно быть управляемое вращение барабанов в обе стороны и свободная размотка.
Сам хочу построить действующую модель тросового экскаватора типа ЭО-5111Б
Это для Копальни?
ты зашёл за этим комментом


Ну и где видео тестовых испытаний?
YouTube же забанили. Не выложить.
А вы айтишник же?
Программисты микроконтроллеров не IT-шники.
Я когда работал в aВтоВАЗ-е нам даже IT аккредитация была не положена.
Повседневно езжу на этой машине). Ну и ремонтирую тоже конечно же. Вижу что автору даже удалось немного подправить заводскую багофичу с развесовкой и перед стал полегче).
Мне очень повезло, что у меня программатор с гальванической изоляцией. Это позволило мне делать пошаговую отладку прошивки прямо при питании от батареи.
Отладку при питании от АКБ можно сделать и гальванически связанным программатором, если подключить к чипу только GND, SWDIO, SWCLK, может быть помех будет чуть больше, решается короткими проводками от программатора к чипу и удлиннителем USB с ферритами.
Что Вы имеете ввиду под PDM управлением, за счёт чего может улучшится плавность хода?
Что Вы имеете ввиду под PDM управлением
PDM это не что иное как Delta-sigma модуляция.
https://en.wikipedia.org/wiki/Delta-sigma_modulation
Плавность достигается за счет равномерного размазывания битов заполнения по всему периоду.

PDM лучше PWM так как при том же заполнении амплитуда пульсаций тока в обмотках меньше.
Электрическая УАЗ Буханка на Телеуправлении