Прорыв в инженерии, о котором говорит весь интернет. Почему-то на Хабре нет, так что решил рассказать.
Итак, ABENICS — это Active Ball Joint Mechanism. Проект разработан Университетом Ямагата в Японии, и являет собой специальную сферическую механическую конструкцию для возможных новых сервоприводов с шаровым шарниром. По сути, это новая форма шестеренки, которая стала возможна благодаря развитию технологий и повышению точности производства. Проект, возможно, назван также в честь бывшего премьер-министра Японии Синдзо Абэ.
Принцип работы механизма проще всего понять из видео. Вместо тысячи слов:
На первом этапе видео показано, как при стандартной форме обычной шлицевой шестерни и обычном вращении её вокруг одной оси за счет конструкции механизма ABENICS на выходе получается трехмерное сферическое движение объекта в любом необходимом направлении. Которое при этом очень точно можно контролировать. Все три степени свободы обеспечиваются одной точкой контакта. Между, как ученые их называют, «сферической» шестерней (СS) и «шестерней-монополем» (MP).
Добавив ещё одну MP-шестерню и повторив ту же схему, можно создать сферическую шестерню с несколькими смещенными осями, которая может приводиться в движение двумя или более монопольными шестернями. Сложность итоговой конструкции практически ничем не ограничена. А тем временем умельцы уже делают их в CAD и пытаются напечатать на принтере.
Для тех, кто хочет попробовать, тут нужно отметить, что в последнем случае добиться бесперебойного движения практически нельзя: необходимой точности при принте «зубьев» добиться будет слишком сложно, и конструкц��я постоянно будет заедать. Максимум можно добиться чего-нибудь такого. Так что домашних роботов с вращающимися человекоподобными суставами нам пока можно не ждать.
Но факт есть факт. Эти новые конструкции зубчатых колес обеспечивают невозможное ранее механическое движение в уютном ламповом форм-факторе шарового шарнира. Один маленький блок решает задачи, на которые раньше требовалось несколько сложных систем. Это может стать огромным прорывом для сферы мобильной робототехники и вообще выпуска любых устройств, в которых нужны компактные универсальные шарниры.
Технические детали
По словам японцев, за прошедшие годы было предложено множество механизмов и приводов, пытающихся решить задачу объединения нескольких степеней свободы в одном механизме (одной контактной поверхности). Классический сферический механизм, в котором для передачи силы используется трение, состоит из сферической шестерни и трех-четырех стратегически расположенных фрикционных колес. Такие классические механизмы допускают неограниченные варианты движения с тремя вращательными степенями свободы,но это довольно сложные конструкции. Кроме того, и в такой передаче много энергии теряется на трение — в том числе из-за необходимости вращать все остальные колеса, даже когда они не задействованы.
В последние годы эта проблема была решена заменой фрикционного колеса на омни-колесо. Оно способно эффективно вращаться в одном направлении и при этом может легко скользить вбок (влево или вправо), то есть у него есть две степени свободы. Но его конструкция тоже является механически довольно сложной. К тому же проскальзывание в омни-колесе препятствует полноценной передаче крутящего момента, а точное позиционирование колеса невозможно без внешних трехмерных датчиков. Все эти проблемы решаются в конструкции ABENICS, к тому же у механизма появляется третья степень свободы.

Другой подход использовал высокочастотные колебания от пьезоэлектрических или магнитострикционных элементов для вращения механизмов. Он допускал широкий диапазон скоростей и компактность конструкции благодаря своей простоте, но не решал вышеуказанных проблем, за исключением точности. Также в разное время предлагались бесконтактные трансмиссионные сферические приводы. Хотя они обеспечивали высокую мощность, они потребляли много электричества и требовали больших вычислительных ресурсов для регулирования движения. К тому же для таких приводов сложно было сконструировать зубчатый редуктор, чтобы передавать высокий крутящий момент на низкой скорости.
Вместо сферической конструкции некоторые исследователи предлагали использовать рычажный механизм со сферическим рычагом. Он мог обеспечить высокую точность позиционирования и отличные динамические характеристики, поскольку исполнительные механизмы могли размещаться в основании системы. Но физические помехи между звеньями ограничивали диапазон движения. Если пытались создать конструкцию с тремя степенями свободы, чем-то приходилось жертвовать — или диапазоном движения, или прочностью механизма, или эффективностью передачи вращения. Чаще всего приходилось допускать большое проскальзывание. То есть точностью движений такие суставы бы не обладали.
Чаще всего в роботах, используемых в промышленности и быту, запястно-плечевой механизм для манипуляторов работает на обычной зубчатой передаче. Которая состоит из нескольких десятков или сотен конических шестеренок. С такой конструкцией мы все знакомы. Но степень своб��ды там только одна. Так что механизмов в одном «суставе» приходится размещать несколько. Выходная мощность такой конструкции сильно ограничена из-за сложной вложенности вала и наличия осевой нагрузки на коническую шестерню. Больших нагрузок подобный механизм сам по себе не выдерживает, его приходится дополнительно страховать, что ещё сильнее утяжеляет и усложняет конструкцию.
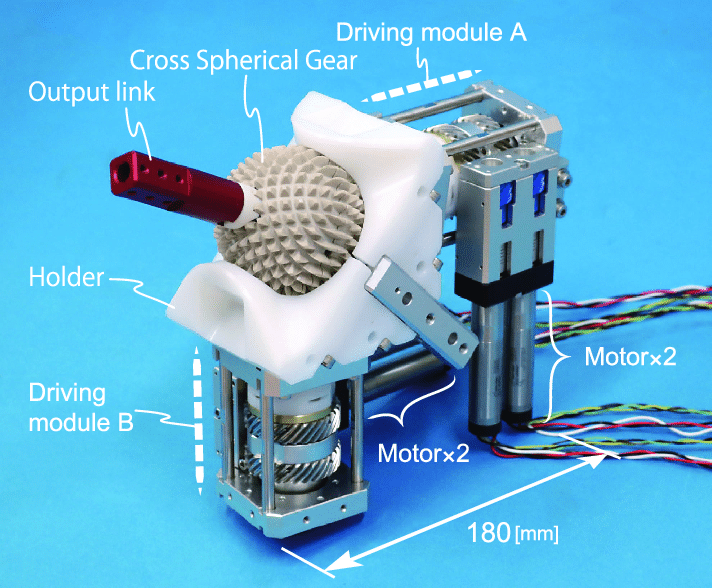
Японские ученые предлагают новый механизм активного шарнира, дополненный взаимодействием сферических шестерен. Он имеет высокую точность движений и достаточную прочность, а также позволяет избежать потерь на лишнем трении. ABENICS использует уникальное взаимодействие между инновационными шестернями, а именно поперечной сферической шестерней (CS) и монопольной шестерней (MP), чтобы достичь трех степеней свободы без проскальзывания.

Механизм, основанный на нескользящем зубчатом зацеплении, как говорят японцы, обеспечивает передачу высокого крутящего момента и надежное позиционирование без использования трехмерных датчиков. Кроме того, поскольку привод и выходное звено могут быть расположены как угодно, механизм может принимать различные конфигурации. А за счет встроенной точности его система управления не требует больших вычислительных ресурсов.
По словам ученых, хотя предлагаемые ими зубчатые «шестеренки» имеют очень сложную форму, они считают, что последние достижения в технологиях производства делают возможным их практическое изготовление, в том числе массовое. Такой механизм позволяет собирать суставы робота в одной точке (т. е. на активном шаровом шарнире), снижая потребление ресурсов и повышая экономичность работы робота.
В тестовом образце шестерни CS и MP были изготовлены из полиэфирэфиркетона (PEEK), супертехнического пластика с высокой смазывающей способностью, обрабатываемостью, прочностью и стабильностью. Держатель был изготовлен из полиоксиметилена (ПОМ), и контактные поверхности зубчатого колеса и держателя при работе не требовали смазки. Основание и корпус устройства производились из легкого и прочного алюминиевого сплава А2017. В тестах этот пластиковый прототип выдерживал вес до 6 кг, не проворачиваясь. Ученые говорят, если сделать сустав из металла, можно достичь куда более высокой прочности.
В общем, вот так.
На Реддите штука собрала рекордные 106 тысяч лайков. В основном народ прогнозирует, как такое устройство можно использовать для замены тазобедренного сустава или суставов руки. Так что можно будет и заменять потерянные конечности более совершенными протезами, и строить более эффективных андроидов. Говорят, идеей уже заинтересовались в Boston Dynamics. Будущее из «Терминатора» становится ближе с каждой минутой.
Так что да, ура! В 21 веке человечество снова изобрело колесо.
НЛО прилетело и оставило здесь промокод для читателей нашего блога:
— 15% на все тарифы VDS (кроме тарифа Прогрев) — HABRFIRSTVDS.

