Доброго времени суток! При просмотре экшн-фильмов (фильмов с хорошо продуманными динамичными сценами) иногда закрадывается в голову: а реально ли это в действительности? Например, мог ли автомобиль перевернуться на маленькой скорости, как быстро можно раскачаться на верёвке без начальной скорости над пропастью…

Что говорит на это физика? Интересно ли писать на бумажечке и потом хвастаться клочком с формулами и парой-тройкой векторов? Давайте сделаем это безопасно и наглядно.
Начнём с обычного математического маятника:
Разделим уравнение на два первого порядка и запишем в стандартном виде
И теперь смело это кормим нашему змею (подробнее об scipy.integrate.odeint, увы, в оригинале).
На первом курсе в лаборатории механики были маятники, возможности каждого из них почти исчерпывало задание к работе. Авот с одним было что-то не то, потому что так было нельзя больше всего привлекал внимание маятник Обербека: «Что будет, если не закрепить грузики?»
И вот спустя N лет я увидела в фильме (очередные пираты Карибского моря) что же произойдёт!
Хмммм а действительно ли это так? Для этого достаточно записать всего два уравнения, первое из которых записано в системе покоя направляющей лезвия с учётом переносного и ускорения Кориолиса.
Куда делась масса гильотины? Как и в большинстве задачек без трения она была и справа, и слева от равенства, и ни на что не влияет.
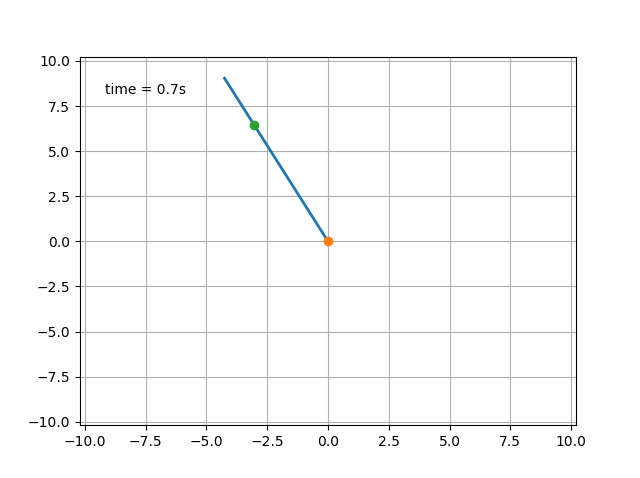
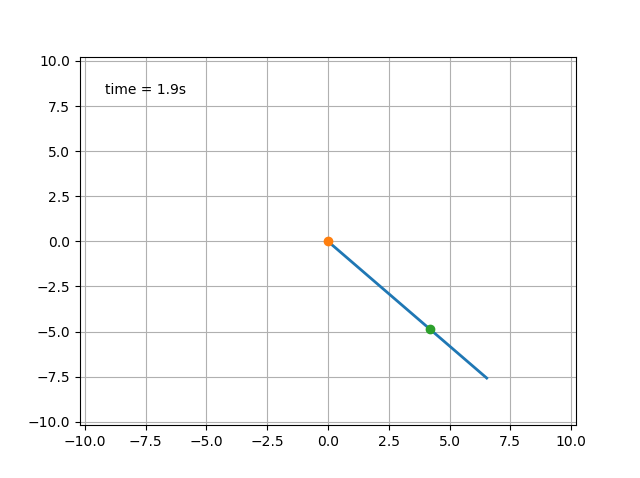
Наслаждаемся результатами:
Если начальная скорость велика, то этот «аттракцион» безопасен после прохождения горизонтального положения.
P.S. здесь начала копать.
P.S.S. поигравшись с начальными параметрами (для маленьких углов отклонения от вертикали или небольших начальных угловых скоростей) можно прийти к «плоскому» пониманию устойчивости гироскопов.
А лучше будем добрыми и не попадать под гильотины!
Что говорит на это физика? Интересно ли писать на бумажечке и потом хвастаться клочком с формулами и парой-тройкой векторов? Давайте сделаем это безопасно и наглядно.
Начнём с обычного математического маятника:



Разделим уравнение на два первого порядка и запишем в стандартном виде

И теперь смело это кормим нашему змею (подробнее об scipy.integrate.odeint, увы, в оригинале).
t = linspace(0,15,100) G = 9.8 L = 1.0 def diffeq(state, t): th, w = state return [w, -G/L*sin(th)] dt = 0.05 t = np.arange(0.0, 20, dt) th1 = 179.0 w1 = 0.0 state = np.radians([th1, w1]) y = odeint(diffeq, state, t)
На первом курсе в лаборатории механики были маятники, возможности каждого из них почти исчерпывало задание к работе. А
И вот спустя N лет я увидела в фильме (очередные пираты Карибского моря) что же произойдёт!
Хмммм а действительно ли это так? Для этого достаточно записать всего два уравнения, первое из которых записано в системе покоя направляющей лезвия с учётом переносного и ускорения Кориолиса.
![$a = - g \ cos \ \theta - [w[wr]] - [\dot{w}r] - 2[wv], \\ \ddot{\theta} = -\dfrac{g}{r} \ sin \ \theta$](https://habrastorage.org/getpro/habr/formulas/f8c/e26/446/f8ce2644609388049f64773268a844f7.svg)
Куда делась масса гильотины? Как и в большинстве задачек без трения она была и справа, и слева от равенства, и ни на что не влияет.
Наслаждаемся результатами:
Если начальная скорость велика, то этот «аттракцион» безопасен после прохождения горизонтального положения.
import matplotlib.animation as animation from pylab import * from scipy.integrate import * import matplotlib.pyplot as plt t = linspace(0,15,100) G = 9.8 L = 10.0 def derivs(state, t): th, w, r, v = state if 0.<r<L or w**2*r>G*cos(th): return [w, -G/r*sin(th), -v, (-w**2*r-G*cos(th)-G*sin(th)-2*w*v)] elif w**2*r<G*cos(th): return [w,-G/r*sin(th),-v, w**2*r-G*cos(th)] return [w,-G/r*sin(th), 0,0] dt = 0.01 t = np.arange(0.0, 20, dt) th1 = 180.0 w1 = 50. r1 = L*0.9 v1 = 0.0 state = np.radians([th1, w1]) state = np.append(state, [r1, v1]) y = odeint(derivs, state, t) x1 = L*sin(y[:, 0]) y1 = -L*cos(y[:, 0]) x2 = (y[:,2].clip(min = 0, max = L))*sin(y[:, 0]) y2 = -(y[:,2].clip(min = 0, max = L))*cos(y[:, 0]) fig = plt.figure() ax = fig.add_subplot(111, autoscale_on=False, xlim=(-L-0.2, L+0.2), ylim=(-L-0.2, L+0.2)) ax.grid() line, = ax.plot([], [], '-', lw=2) point, = ax.plot(0,0,'o', lw=2) extra, = ax.plot(x1/L*r1,y1/L*r1,'o', lw=2) time_template = 'time = %.1fs' time_text = ax.text(0.05, 0.9, '', transform=ax.transAxes) def init(): line.set_data([], []) point.set_data(0,0) time_text.set_text('') extra.set_data(x1/L*r1,y1/L*r1) return line, time_text, point, extra def animate(i): thisx = [0, x1[i]] thisy = [0, y1[i]] thisx2 = x2[i] thisy2 = y2[i] point.set_data(thisx[0],thisy[0]) line.set_data(thisx, thisy) time_text.set_text(time_template % (i*dt)) extra.set_data([thisx2,thisy2]) return line, time_text, point, extra ani = animation.FuncAnimation(fig, animate, np.arange(1, len(y)), interval=25, blit=True, init_func=init, repeat = False) show()
P.S. здесь начала копать.
P.S.S. поигравшись с начальными параметрами (для маленьких углов отклонения от вертикали или небольших начальных угловых скоростей) можно прийти к «плоскому» пониманию устойчивости гироскопов.
А лучше будем добрыми и не попадать под гильотины!
