Исследование методов SLAM для навигации мобильного робота внутри помещений. Опыт исследования R2 Robotics. (продолжение)
9 min
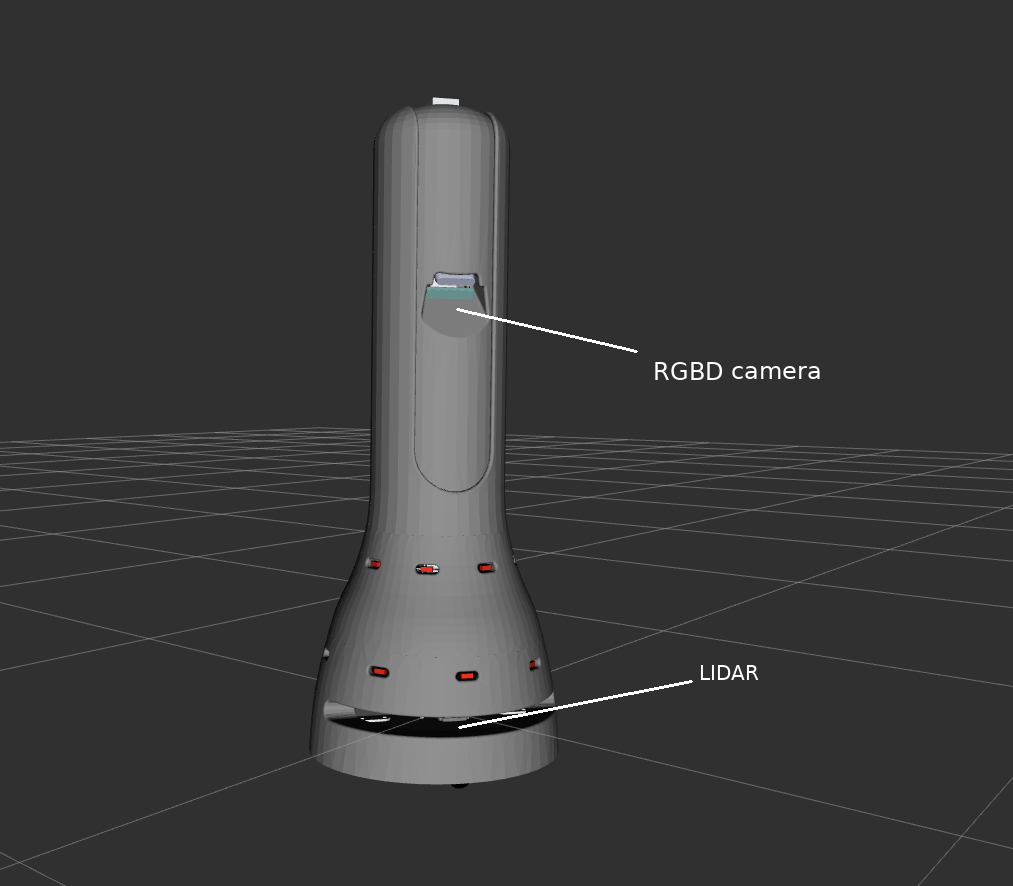
В прошлой статье мы рассмотрели несколько современных алгоритмов SLAM для ROS. Во данной статье будет рассмотрено применение SLAM на практике. В качестве робота используется опытный образец мобильного робота мерчандайзера компании «R2 Robotics». Робот имеет базу с двумя ведущими колесами, расположенными на одной оси в центре, что позволяет совершать развороты на месте и способствует высокой манёвренности. Диаметр робота составляет ~60 см, а его высота 1.5 метра.