
Overdetection или SFTE. Другие возможности применения YOLO
В этой статье будет описан подход (идея), как при помощи детектирующей нейросети решать более сложные задачи, чем детекция. Идея, лежащая в основе: давайте решать не задачу детекции объекта, а задачу детекции ситуации. Причем, вместо того, чтобы конструировать новую нейросетевую архитектуру, мы будем конструировать входящий кадр. А решать саму задачу будем при помощи стандартных предобученных сетей.
В качестве детектирующей нейросети использована архитектура YOLO, и все гипотезы этого подхода проверены для неё. Вероятно, эти же подходы будут работать и на других архитектурах. Действительно ли они будут работать, надо проверять отдельно.
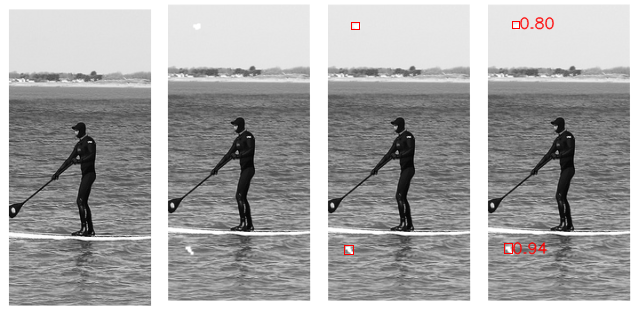
В заметке я покажу как «переформулировать» задачу детекции так, чтобы решать другие, более сложные задачи. А именно, при помощи YOLO можно не только решать задачу детекции, но и задачу трекинга. И даже больше.