Информацию о состоянии окружающей среды или, например, некоторого объекта управления можно получать, измеряя текущие значения параметров, характеризующих те или иные свойства среды или объекта. Для получения, обработки и передачи такой информации техническими средствами, значение измеряемого параметра необходимо преобразовать автоматическими измерительными устройствами в сигнал измерительной информации. Для этого реализуют информационно-измерительный канал (ИИК), как совокупность технических средств, каждое из которых будет выполнять свою определённую функцию, начиная от восприятия измеряемой величины и заканчивая получением измерительной информации в форме, удобной для восприятия человеком или для дальнейшей её обработки. И всё бы хорошо, да вот по пути следования информации на полезный сигнал y(t) измерительной информации накладывается помеха e(t) – случайная функция времени, которая может моделировать и случайную погрешность измерительного преобразователя, и электрические наводки в соединительных проводах, и случайные пульсации измеряемого параметра, и другие факторы.
Исходя из этого, возникает задача первичной обработки информации в ИИК – фильтрация сигнала y(t) измерительной информации от случайной помехи e(t). В основном, методы фильтрации основаны на различии частотных спектров функций y(t) и e(t), и помеху считают более высокочастотной.
Синтез оптимального реализуемого фильтра является сложной задачей, для решения которой необходимо точное задание характеристик полезного сигнала и помехи. Поэтому на практике обычно задают передаточную функцию фильтра и ограничиваются параметрическим синтезом, применяя простые алгоритмы фильтрации.
Методы фильтрации осуществляют, как на программном уровне, так и на аппаратном. Например, в датчике BMP280 (BOSCH) имеется возможность подключить БИХ-фильтр на аппаратном уровне, изменяя по необходимости коэффициент фильтрации k, [1].
Фильтры с бесконечной импульсной характеристикой относятся к рекурсивным фильтрам и вычисляют выходной сигнал на основании значений предыдущих входных и выходных отсчётов. Теоретически, импульсная характеристика БИХ-фильтра никогда не достигает нуля, поэтому выход получается бесконечным по длительности.
В общем виде, алгоритм фильтрации одномерного скалярного цифрового фильтра запишем, как [2]:
![$y[n] = T(x[n],x[n-1],…,x[n-M],y[n-1],…,y[n-N],n)$](https://habrastorage.org/getpro/habr/formulas/b8a/bf2/da6/b8abf2da66287da3a0e95b7d12889bbe.svg) , (1),
, (1),
где T – скалярная функция одной переменной.
Функция T зависит от текущего входного сигнала x[n], и предыдущих: M отсчётов входного сигнала и N отсчётов выходного сигнала
и N отсчётов выходного сигнала 
Выход БИХ-фильтра описывают разностным уравнением вида:
 (2),
(2),
где x[n], y[n] – вход и выход фильтра, соответственно, { } – набор прямых коэффициентов, M – число прямых коэффициентов, {
} – набор прямых коэффициентов, M – число прямых коэффициентов, { } – набор обратных коэффициентов, N – число обратных коэффициентов.
} – набор обратных коэффициентов, N – число обратных коэффициентов.
Применяя z-преобразование к обеим сторонам уравнения (2), получим:
 (3).
(3).
Тогда передаточная функция фильтра будет выглядеть следующим образом:
 (4)
(4)
В общем виде алгоритм фильтрации одномерного скалярного стационарного рекурсивного фильтра выглядит так:
![$y[n] = T(x[n],y[n-1])$](https://habrastorage.org/getpro/habr/formulas/5ad/76d/3fb/5ad76d3fb88ad5b313423e5472597674.svg) . (5)
. (5)
Запишем теперь разностное уравнение для БИХ-фильтра в виде [1]:
(6),
где k – коэффициент фильтра;
или
![$y[n]=ay[n-1]+bx[n]$](https://habrastorage.org/getpro/habr/formulas/d2f/678/2e0/d2f6782e06362db1ef64568d26eb7321.svg) (7),
(7),
где – обратный и прямой коэффициенты фильтра, соответственно.
– обратный и прямой коэффициенты фильтра, соответственно.
Из (7) очевидно, что при k=1 выходной сигнал фильтра будет повторять входной, и при увеличении коэффициента фильтра k вес предыдущего фильтрованного сигнала стремится к 1, а вес измеренного значения стремится к 0.
Алгоритм (6) реализован на примере информационно-измерительного канала абсолютного атмосферного давления для датчика BMP280, на программном уровне в среде разработки Arduino Software (IDE), листинг 1. Электрическая схема подключений компонентов ИИК представлена на рис. 1. Общий вид прототипа ИИК абсолютного атмосферного давления представлен на рис. 2. В прототипе предусмотрена возможность изменять коэффициент фильтрации в диапазоне 1…50 с шагом 1, вращением ручки потенциометра. На экране знакового жидкокристаллического дисплея отображается измеренное значение давления (при k = 1) или фильтрованное значение (при k = 2…50), и значение коэффициента фильтрации k.
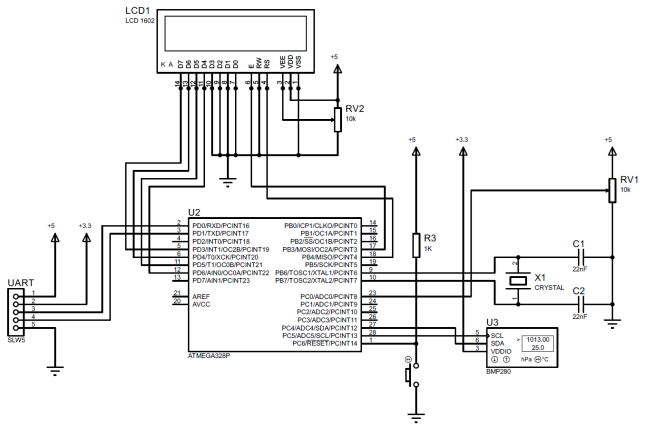
Рис. 1 – Электрическая схема подключений компонентов прототипа ИИК

Рис. 2 – Общий вид прототипа ИИК
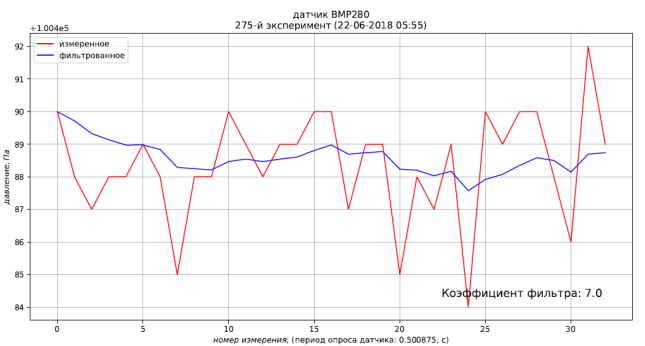
На листинге 2 представлен Python-cкрипт для исследования БИХ-фильтров. Коэффициент фильтрации k прописываем в скрипте. Измеренные значения давления последовательно считываются с виртуального COM-порта и фильтруются. В графическое окно и на консоль выводятся измеренные и фильтрованные значения измеряемого параметра в реальном режиме времени. Результаты эксперимента записываются таблицей в файл, а в графическое окно выводятся временные графики измеренных и фильтрованных значений.

Приведенный алгоритм фильтрации очень прост в программной реализации и, практически, может быть использован в ИИК, подобных рассмотренному в этой статье.
В работе принимал участие Лосихин Д.А., с.в. каф. КИТиМ.
Исходя из этого, возникает задача первичной обработки информации в ИИК – фильтрация сигнала y(t) измерительной информации от случайной помехи e(t). В основном, методы фильтрации основаны на различии частотных спектров функций y(t) и e(t), и помеху считают более высокочастотной.
Синтез оптимального реализуемого фильтра является сложной задачей, для решения которой необходимо точное задание характеристик полезного сигнала и помехи. Поэтому на практике обычно задают передаточную функцию фильтра и ограничиваются параметрическим синтезом, применяя простые алгоритмы фильтрации.
Методы фильтрации осуществляют, как на программном уровне, так и на аппаратном. Например, в датчике BMP280 (BOSCH) имеется возможность подключить БИХ-фильтр на аппаратном уровне, изменяя по необходимости коэффициент фильтрации k, [1].
БИХ-фильтр
Фильтры с бесконечной импульсной характеристикой относятся к рекурсивным фильтрам и вычисляют выходной сигнал на основании значений предыдущих входных и выходных отсчётов. Теоретически, импульсная характеристика БИХ-фильтра никогда не достигает нуля, поэтому выход получается бесконечным по длительности.
В общем виде, алгоритм фильтрации одномерного скалярного цифрового фильтра запишем, как [2]:
, (1),где T – скалярная функция одной переменной.
Функция T зависит от текущего входного сигнала x[n], и предыдущих: M отсчётов входного сигнала
и N отсчётов выходного сигнала Выход БИХ-фильтра описывают разностным уравнением вида:
(2),где x[n], y[n] – вход и выход фильтра, соответственно, {
} – набор прямых коэффициентов, M – число прямых коэффициентов, {} – набор обратных коэффициентов, N – число обратных коэффициентов.Применяя z-преобразование к обеим сторонам уравнения (2), получим:
(3).Тогда передаточная функция фильтра будет выглядеть следующим образом:
(4)Алгоритм фильтрации одномерного БИХ-фильтра
В общем виде алгоритм фильтрации одномерного скалярного стационарного рекурсивного фильтра выглядит так:
. (5)Запишем теперь разностное уравнение для БИХ-фильтра в виде [1]:
(6),где k – коэффициент фильтра;
или
(7),где
– обратный и прямой коэффициенты фильтра, соответственно.Из (7) очевидно, что при k=1 выходной сигнал фильтра будет повторять входной, и при увеличении коэффициента фильтра k вес предыдущего фильтрованного сигнала стремится к 1, а вес измеренного значения стремится к 0.
Алгоритм (6) реализован на примере информационно-измерительного канала абсолютного атмосферного давления для датчика BMP280, на программном уровне в среде разработки Arduino Software (IDE), листинг 1. Электрическая схема подключений компонентов ИИК представлена на рис. 1. Общий вид прототипа ИИК абсолютного атмосферного давления представлен на рис. 2. В прототипе предусмотрена возможность изменять коэффициент фильтрации в диапазоне 1…50 с шагом 1, вращением ручки потенциометра. На экране знакового жидкокристаллического дисплея отображается измеренное значение давления (при k = 1) или фильтрованное значение (при k = 2…50), и значение коэффициента фильтрации k.
Листинг 1
//ИИК абсолютного атмосферного давления (температуры) //цель - исследование БИХ-фильтров //https://github.com/orgua/iLib/blob/master/src/i2c.h #include "i2c.h" //https://github.com/orgua/iLib/blob/master/src/i2c_BMP280.h #include "i2c_BMP280.h" //https://github.com/arduino-libraries/LiquidCrystal #include <LiquidCrystal.h> //https://github.com/orgua/iLib/tree/master/examples/i2c_BMP280 BMP280 bmp280; const int rs = 12, en = 11, d4 = 6, d5 = 5, d6 = 4, d7 = 3; //const int rs = PB4, en = PB3, d4 = PD6, d5 = PD5, d6 = PD4, d7 = PD3; LiquidCrystal lcd(rs, en, d4, d5, d6, d7); float pascal_f = 100500; float filter_K = 1; const int analogInPin = A0; //аналоговый вход от потенциометра int sensorValue = 0; //сигнал от потенциометра int outputValue = 0; void setup() { Serial.begin(9600); //Serial.print("Probe BMP280: "); if (bmp280.initialize()) { //Serial.println("Sensor found"); ; } else { Serial.println("Sensor missing"); while (1) {} } bmp280.setEnabled(0); bmp280.triggerMeasurement(); bmp280.setFilterRatio(0); lcd.begin(16, 2); lcd.setCursor(0, 0); lcd.print("measure"); lcd.setCursor(7, 1); lcd.print("Pa"); lcd.setCursor(10, 0); lcd.print("filter"); } void loop() { float temperature; float pascal, hpascal; sensorValue = analogRead(analogInPin); outputValue = map(sensorValue, 0, 1023, 1, 50); filter_K = outputValue; bmp280.awaitMeasurement(); bmp280.getTemperature(temperature); temperature -= 1.7; //поправка bmp280.getPressure(pascal); pascal -= 50;//поправка hpascal = pascal/100.; bmp280.triggerMeasurement(); pascal_f = (pascal_f * (filter_K - 1) + pascal) / filter_K; //(6) Serial.println(pascal_f,0); if(pascal_f < 100000) lcd.setCursor(6, 1); lcd.print(" "); lcd.setCursor(0, 1); lcd.print(pascal_f,0); if(filter_K < 10) lcd.setCursor(13, 1); lcd.print(" "); lcd.setCursor(10, 1); lcd.print(filter_K,1); delay(300); }
Рис. 1 – Электрическая схема подключений компонентов прототипа ИИК
Рис. 2 – Общий вид прототипа ИИК
Python-cкрипт для исследования БИХ-фильтров
На листинге 2 представлен Python-cкрипт для исследования БИХ-фильтров. Коэффициент фильтрации k прописываем в скрипте. Измеренные значения давления последовательно считываются с виртуального COM-порта и фильтруются. В графическое окно и на консоль выводятся измеренные и фильтрованные значения измеряемого параметра в реальном режиме времени. Результаты эксперимента записываются таблицей в файл, а в графическое окно выводятся временные графики измеренных и фильтрованных значений.
Листинг 2
import numpy as np import matplotlib.pyplot as plt import serial from drawnow import drawnow import datetime, time k = 6.0 #коэффициент фильтрации + 1 filter_K = 1 + k #вывод выборки в графическое окно def cur_graf(): plt.title("BMP280") plt.ylim( 100450, 100510 ) plt.plot(nw, lw1, "r.-", label='измеренное') plt.plot(nw, lw1f, "b.-", label='фильтрованное') plt.legend(loc='best') plt.ylabel(r'$давление, Па$') plt.xlabel(r'$номер \ измерения$') plt.grid(True) #вывод всех списков в графическое окно def all_graf(): plt.close() fig=plt.figure() ax = fig.add_subplot(111) fig.subplots_adjust(top=0.85) ax.set_title("датчик BMP280\n" + str(count_v) + "-й эксперимент " + "(" + now.strftime("%d-%m-%Y %H:%M") + ")") ax.set_ylabel(r'$давление, Па$') ax.set_xlabel(r'$номер \ измерения$' + '; (период опроса датчика: {:.6f}, c)'.format(Ts)) ax.text(0.95, 0.03, "Коэффициент фильтра: " + str(filter_K) + "\n", verticalalignment='bottom', horizontalalignment='right', transform=ax.transAxes, color='black', fontsize=14) plt.plot( n, l1, "r-", label='измеренное') plt.plot( n, l1f, "b-", label='фильтрованное') plt.legend(loc='best') plt.grid(True) plt.show() #определяем количество измерений # общее количество измерений str_m = input("введите количество измерений: ") m = eval(str_m) # количество элементов выборки mw = 16 #настроить параметры последовательного порта ser = serial.Serial() ser.baudrate = 9600 port_num = input("введите номер последовательного порта: ") ser.port = 'COM' + port_num ser #открыть последовательный порт try: ser.open() ser.is_open print("соединились с: " + ser.portstr) except serial.SerialException: print("нет соединения с портом: " + ser.portstr) raise SystemExit(1) #определяем списки l1 = [] # для значений давления l1f = [] # для фильтрованных значений давления t1 = [] # для значений моментов времени lw1 = [] # для значений выборки давления lw1f= [] # для фильтрованных значений выборки давления n = [] # для значений моментов выборки nw = [] # для значений выборки моментов времени #подготовить файлы на диске для записи filename = 'count.txt' in_file = open(filename,"r") count = in_file.read() count_v = eval(count) + 1 in_file.close() in_file = open(filename,"w") count = str(count_v) in_file.write(count) in_file.close() filename = count + '_' + filename out_file = open(filename,"w") #вывод информации для оператора на консоль print("\nпараметры:\n") print("n - номер измерения;") print("P - давление, Па;") print("\nизмеряемые значения величины давления\n") print('{0}{1}\n'.format('n'.rjust(4),'P'.rjust(10))) #считывание данных из последовательного порта #накопление списков #формирование текущей выборки #вывод значений текущей выборки в графическое окно i = 0 while i < m: n.append(i) nw.append(n[i]) if i >= mw: nw.pop(0) line1 = ser.readline().decode('utf-8')[:-2] t1.append(time.time()) if line1: l1.append(eval(line1)) lw1.append(l1[i]) if i : l1f.append( (l1f[i-1]*(filter_K - 1) + l1[i])/filter_K ) #(6) lw1f.append(l1f[i]) else : l1f.append(l1[i]) lw1f.append(l1f[i]) if i >= mw: lw1.pop(0) lw1f.pop(0) print('{0:4d} {1:10.2f} {2:10.2f}'.format(n[i],l1[i],l1f[i]) ) drawnow(cur_graf) i += 1 #закрыть последовательный порт ser.close() ser.is_open time_tm = t1[m - 1] - t1[0] print("\nпродолжительность времени измерений: {0:.3f}, c".format(time_tm)) Ts = time_tm / (m - 1) print("\nпериод опроса датчика: {0:.6f}, c".format(Ts)) #запись таблицы в файл print("\nтаблица находится в файле {}\n".format(filename)) for i in np.arange(0,len(n),1): count = str(n[i]) + "\t" + str(l1[i]) + "\n" out_file.write(count) #закрыть файл с таблицей out_file.close() out_file.closed #получить дату и время now = datetime.datetime.now() #вывести график в графическое окно all_graf() end = input("\nнажмите Ctrl-C, чтобы выйти ")
Результаты эксперимента
введите количество измерений: 33 введите номер последовательного порта: 6 соединились с: COM6 параметры: n - номер измерения; P - давление, Па; измеряемые значения величины давления n P 0 100490.00 100490.00 1 100488.00 100489.71 2 100487.00 100489.33 3 100488.00 100489.14 4 100488.00 100488.97 … 30 100486.00 100488.14 31 100492.00 100488.70 32 100489.00 100488.74 продолжительность времени измерений: 16.028, c период опроса датчика: 0.500875, c таблица находится в файле 275_count.txt нажмите Ctrl-C, чтобы выйти
Выводы
Приведенный алгоритм фильтрации очень прост в программной реализации и, практически, может быть использован в ИИК, подобных рассмотренному в этой статье.
В работе принимал участие Лосихин Д.А., с.в. каф. КИТиМ.

