Intro
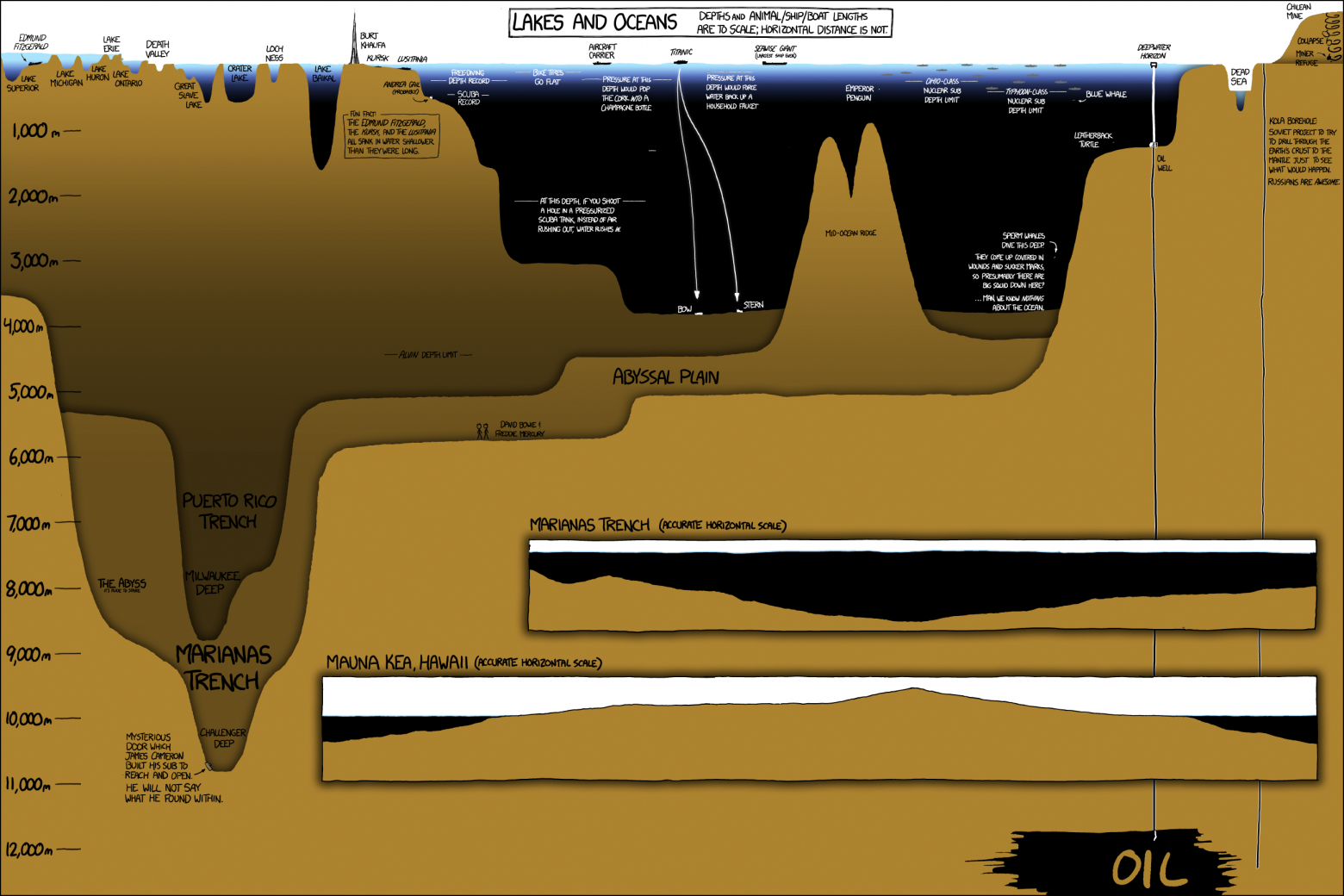
Поверхность планеты примерно на 71% покрыта океанами (порядка 361 млн. км²). Площадь РФ примерно 17 млн. км. Глубина океанов неравномерна, выделяют следующие зоны:
Шельф (shelf — полка) — глубина до 200—500 м;
Континентальный склон — глубина до 3500 м;
Океанское ложе — глубина до 6000 м;
Глубоководные желоба — глубина ниже 6000 м.
Средняя глубина также отличается:
Атлантический — 3600 м
Индийский — 3890 м
Северный ледовитый — 1225 м
Тихий — 4250 м
Зачем человек лезет под воду?
Исторически сначала за едой (рыбы, моллюски, членистоногие, водоросли). Затем для проведения инженерных работ (строительство гидротехнических сооружений, боевые действия). Последнее время для строительства линейных объектов (трубопроводы (газ, нефть) и подводные кабели) и добычи полезных ископаемых (газ, нефть, железномарганцевые конкреции). Для человека океан опасен, но полезен в качестве источника добряков.
Как человек покорял глубины
Ныряние на задержке дыхания
Если ныряльщики за жемчугом и прочими устрицами были во все времена, то вот погружение на значительные глубины стало возможным в новое время. Справедливости ради, нужно отметить рекордные глубины погружений у фридайверов [1]:
Погружение с постоянным весом на задержке дыхания:
Мужчины — 129 м (Алексей Молчанов, 2016-10-28)
Женщины — 104 м (Алессия Зеччини, 2017-05-10)
UPD:
Мужчины — 130 м (Алексей Молчанов, 2018-07-18)
Женщины — 107 м (Алессия Зеччини, 2018-07-26)
С сайта AIDA.
No-limits:
Мужчины — 253.2 м (Герберт Ницш, 2012-06-06)
UPD:
AIDA не засчитала попытку.
Мужчины — 214 м (Герберт Ницш, 2007-06-14)
С сайта AIDA.
Женщины — 160 м (Таня Стритер, 2002-08-17)
Также необходимо понимать, что для достижения таких результатов люди всю жизнь посвящают тренировкам, при этом очень многие гибнут в попытке побить рекорд.
Использование достижений науки и техники для работы на глубине

Водолазная машина Лесбриджа
В 1715 г. англичанин Джон Лесбридж построил подводную машину, которая уже была прототипом современного жесткого скафандра. Человек помещался в металлическом цилиндре с крышкой. В цилиндре было три отверстия: два для рук и третье — смотровое, в которое было вставлено стекло. По описаниям, изобретатель опускался на глубину до 24 м и проводил под водой до 34 минут. Использовали машину для подъёма ценностей после кораблекрушений.

Тяжёлый водолазный костюм
Далее можно выделить 1819 год, когда Кристьяном Августом Сиебе был представлен первый тяжёлый водолазный костюм, различные модификации которого используются по сей день.

Например, трёхболтовка: данное стандартное водолазное снаряжение используется в российском ВМФ и гражданском флоте с XIX века и по сей день. Им комплектуются водолазные станции морских и рейдовых водолазных ботов, спасательных судов и буксиров. Не изолирует водолаза от давления внешней среды (воды). Оснащается переговорным устройством.
Рекорд погружения в тяжелом водолазном костюме, который удалось найти — это 317 метров [2]. В рамках отработки элементов курсовой задачи К-2 (действие одиночного корабля в море по предназначению) водолазные специалисты спасательного судна «Игорь Белоусов» Тихоокеанского флота ВМФ РФ в глубоководном полигоне впервые совершили экспериментальный спуск в водолазном колоколе на глубину 317 метров с выходом на грунт.
АСС ВМФ и командование ВМФ на основании результатов экспериментальных спусков на глубины до 305 м пришли к выводу, что для обеспечения безопасности водолазов при спусках методом кратковременных погружений глубину спусков следует ограничить 200 м, поскольку на больших глубинах водолазы оставались физически неработоспособными, и что самостоятельное спасение подводников из затонувшей подводной лодки способом подъема по буйрепу с глубин более 200 м невозможно [3].
Опять же такие глубины доступны после длительной профессиональной подготовки и использования барокамер для декомпрессии.
Аппарат Генри Флюсса
Далее можно выделить аппарат Генри Флюсса 1878 года патентования, который можно назвать SCUBA.

Акваланг
В 1945 году Жак-Ив Кусто вместе с Эмилем Ганьяном патентуют акваланг. Акваланг сейчас используют большинство любителей подводных погружений, профессиональные водолазы и спасатели.

Акваланг: 1 — Шланг, 2 — Мундштук; 3 — Клапан (редуктор); 4 — Наплечный ремень; 5 — Наспинный щиток; 6 — Резервуар (газовый баллон)
Рекорд погружения с аквалангом на текущий момент принадлежит Ахмеду Габру. Ему удалось достичь отметки 332,4 метров ниже поверхности воды Красного моря неподалеку от города Дахаб. Всё погружение заняло 14 часов (всплытие скорее всего длилось не менее 10 ч.).
И опять же, для таких рекордов необходима длительная подготовка, барокамера и большая команда поддержки.
Какова максимальная глубина, на которую может погрузиться человек, испытывая на себе действие давления столба воды на этой глубине?
COMEX
534 м в открытой воде 1988 год, Марсель, Франция [4], с использованием дыхательной смеси COMEX Hydra 8 (49% водорода, 50% гелия, 1% кислорода) всего 6 человек (4 водолаза COMEX, 2 из ВМФ Франции). Сначала 8 дней в барокамере постепенное повышение давления до 53 атмосфер. Далее все 6 водолазов работали на глубинах от 520 м до 534 м. Один раз было выполнено упражнение по соединению труб. После выполнения запланированных задач в течение 18 дней водолазы проходили декомпрессию в барокамере.
701 м в экспериментальной барокамере 1992 год, Марсель, Франция [5]. Протокол эксперимента:
- 4 недели подготовительного периода перед «погружением»
- Двухдневная изоляция на глубине 10 м
- 13 дней для достижения давления, соответствующего глубине 675 м с использованием дыхательной смеси COMEX Hydra 8 (49% водорода, 50% гелия, 1% кислорода).
- 3 дня нахождения в давлении между 650 м и 675 м
- Затем один из водолазов Тео Мавростомос перешёл в отдельную барокамеру и продолжил погружение до глубины 701 м с использованием дыхательной смеси COMEX Hydro 10, где находился в течение 7 часов.
- Затем 24 дня декомпрессии.
- И 2,5 месяца наблюдений за участниками эксперимента.
По всей видимости, давление на глубине больше 700 метров с использованием для дыхания смеси газов является предельным.
Существуют изыскания по технологии жидкостного дыхания. Для этого в экспериментах применяют жидкий перфтороуглерод с растворённым в нём кислородом и углекислым газом. По состоянию на дату публикации проводятся эксперименты над лабораторными животными.
Тут стоит напомнить про средние глубины океанов от 1250 м до 4250 м.
Жёсткие водолазные скафандры
Следующем ответвлением для покорения глубин является создание костюмов, поддерживающих для человека нормальное атмосферное давление и защищающих от давления окружающей среды.
По ГОСТ Р 52119-2003: Жёсткий водолазный скафандр предназначен для подводного наблюдения и выполнения водолазных работ оператором находящимся в условиях нормального внутреннего давления (Техника водолазная. Термины и определения).
Снаряжение, предназначенное для глубоководных (до 600 метров) работ, во время которых на водолаза действует обычное атмосферное давление, что снимает проблему декомпрессии, исключает азотное, кислородное и иные отравления. Исторически можно выделить следующие изделия:
Водолазный костюм братьев Кармагноль
Водолазный костюм с 20 маленькими иллюминаторами Альфонса и Теодора Кармагноль, Марсель, Франция, 1878. Скафандр по задумке должен был быть способен безопасно погрузить человека на глубину в 60 м. Однако, он никогда не работал как надо и постоянно протекал. Сейчас находится в музее ВФМ Франции.

Костюмы «Нойфельд и Кунке»
Три поколения водолазных костюмов немецкой фирмы «Нойфельд и Кунке», 1917-1940.
Костюм третьего поколения (произведён между 1929 и 1940 годами) позволял погружаться на глубину 160 м. и был снабжён встроенным телефоном. Разработки компании «Нойфельд и Кунке» легли в основу жесткого скафандра итальянца Роберто Галеацци в начале 30-х годов прошлого столетия, была в том числе принята на вооружение военного флота недавно образованного Советского государства.

1-Man Sub
1933, Мини-подводная лодка на одного человека. Скафандр, позволяющий водолазу значительное время работать на глубине 300 метров без долгого процесса декомпрессии.

Jum suit
JIM suit 1974, Жесткий скафандр. Скафандр использовался в 70-х годах прошлого века в нефтяной промышленности. В 1979 женщина водолаз — Сильвия Эрл установила мировой рекорд в этом скафандре. Она спустилась на 381 метр и шла по морскому дну в течение двух с половиной часов.

Newtsuit
1985 год, разработка во главе с Филом Ньюттеном. Тестирован до глубины 900 м, сертифицирован до глубины 300 м.

Exosuit
Exosuit — это 240-килограммовый двухметровый костюм из алюминиевого сплава, который позволяет человеку работать на глубине до 305 метров. Для повышения мобильности и помощи слабым человеческим рукам и ногам, Exosuit оснащен 4 движителями мощностью по 1,6 л.с. (с возможностью увеличения до 8), а также 18 соединениями, которые обеспечивают подвижность рук. «Рукава» скафандра можно оснащать различными сменными насадками: захватом, резаком, буром и т.д.
Особенностью Exosuit является полностью автономное жизнеобеспечение, в то время как к большинству аналогичных подводных скафандров кислород и электричество подводятся с борта корабля. Exosuit имеет систему регенерации кислорода, которая очищает воздух от углекислого газа и пополняет его кислородом. Система имеет автономность в 50 часов. В Exosuit человек дышит обычным атмосферным воздухом под нормальным давлением, что избавляет от лишнего риска и длительной декомпрессионной процедуры. Стоимость Exosuit составляет $1,3 млн.

Atmospheric Diving System (ADS 2000)
ADS 2000 был разработан совместно с OceanWorks International и ВМС США в 1997 году для удовлетворения требований ВМС США. Корпус из кованого алюминиевого сплава T6061, усовершенствованная конструкция шарнирного соединения. Способный работать на глубине до 610 м на протяжении 6 часов, имеет автономную автоматическую систему жизнеобеспечения. Интегрированная двойная система рулевого управления позволяет пилоту легко перемещаться под водой. Он был сертифицирован ВМС США 1 августа 2006 года, когда главный военно-морской водолаз Даниэль Джексон погрузился на глубину 2000 футов (610 м).


Даже с использованием скафандров, человек может погрузиться на глубину до 610 м.
А что же подводные лодки?
Современные подводные лодки позволяют погрузится на глубину около 600-650 м.

Кликабельно
Абсолютным рекордсменом максимального погружения пока остаётся советская АПЛ «Комсомолец», в 1985 году подводная лодка достигла глубины 1027 метров ниже поверхности моря. Рабочее значение для нее составляло 1000 м, а расчетное — 1250 м. Судьба АПЛ в дальнейшем сложилась трагически. «Комсомолец» затонул в 1989 году из-за сильного пожара, начавшегося на глубине около 300 метров. И хотя ему, в отличие от того же «Трешера», удалось всплыть, история все равно получилась очень трагической.
Для погружения человека на глубины свыше 600 метров были разработаны батискафы.
Батискафы
FNRS-2 и FNRS-3

FNRS-2 был первым батискафом, созданным Огюстом Пиккаром, Швейцария. Работа по созданию батискафа началась в 1937 году и была прервана Второй Мировой войной. Батискаф был достроен в 1948 году. Назван в честь бельгийского фонда национальных научных исследований (Fonds National de la Recherche Scientifique).
Фактическое строительство FNRS-2 велось в 1946-1948 годах. Батискаф был повреждён во время морских испытаний в 1948 году возле островов Зеленого Мыса.
На испытания в открытом море батискаф FNRS-2 отправился на 3500 тонном бельгийском судне Scaldis. Однако, кран Scaldis был недостаточно мощным, чтобы вытащить из воды FNRS-2 с заполненными бензином поплавковыми цистернами. Было успешно совершено беспилотное испытательное погружение на 1400 м, но из-за технических проблем не удалось опустошить поплавковые цистерны от бензина. Было принято решение отбуксировать FNRS-2 обратно в порт, но батискаф побило волнами о борта судна и возникла течь бензина из поплавковых цистерн. После обнаружения протечки бензин был слит в море, а FNRS-2 поднят на борт судна. Дальнейшие испытания были свёрнуты из-за отсутствия средств на починку.
После прекращения финансирования в 1948 году FNRS-2 был продан французскому военно-морскому флоту. Французские специалисты отремонтировали FNRS-2 и переименовали в FNRS-3. В феврале 1954 года FNRS-3 достиг глубины 4050 метров в Атлантике, в 160 милях от Дакара, предыдущий рекорд Пикара составлял 3150 м в 1953 году.
Trieste

Спроектированный в Швейцарии, построенный в Италии глубоководный обитаемый научно-исследовательский батискаф. Разработан Огюстом Пиккаром. Триест был спущен в Средиземное море 26 августа 1953 года недалеко от острова Капри. Проект был основан на предыдущем опыте использования батискафа FNRS-2. Триест управлялся французским флотом. После нескольких лет эксплуатации в Средиземном море Триест был куплен в 1958 году флотом Соединенных Штатов за 250 000 долларов. Изначально сфера для экипажа была рассчитана на погружение до 4000 м, однако ВМС США заказали у компании Krupp изготовление сферы, способной выдержать погружение на 11000м.
В ходе реализации проекта «Нектон» 23 января 1960 Жак Пикар и лейтенант ВМС США Дон Уолш совершили погружение на глубину 10 919 м. Таким образом впервые удалось покорить «Бездну Челленджера» в Марианской впадине.
Archimède

Разработка батискафа с предварительным названием B11000 (Bathyscaphe 11 000 метров) началось в 1957 году в арсенале Тулона. Финансирование осуществляли Национальный Центр Научных Исследований Франции (CNRS) и Бельгийский Национальный Фонд Научных Исследований (FNRS). Проектом руководил Пьер Вильм, значительное участие в проектировании принимал капитан FNRS-3 Жорж Уо. «Архимед» предназначался для погружения на дно Марианской впадины, однако батискаф «Триест» опередил «Архимеда»
Shinkai

Shinkai — обитаемый подводный аппарат, глубина погружения до 600 м. Спущен на воду в 1970 году, до 1981 года имел самую большую глубину погружения среди японских кораблей. Принадлежит и управляется береговой охраной Японии.
Shinkai 2000 — 1981 год постройки. Пределная глубина 2000 м.
Shinkai 6500 — 1990 года постройки. Предельная глубина 6500м.
Поиск-6

Обитаемый самоходный глубоководный подводный аппарат батискафного типа АС-7 «Поиск-6» проекта 1906 был спроектирован ЛМПБ «Рубин» и СПМБМ «Малахит» и построен на Ново-Адмиралтейском заводе в Ленинграде в 1975-1979 годах. Испытания аппарата производились на Черном море и на Тихом океане, при этом была превышена глубина погружения 6000 метров. Испытания аппарата выявили его значительные конструктивные недостатки и сопровождались многократными отказами техники. В итоге в сентябре 1987 года государственная приемная комиссия, учитывая физическое и моральное старение аппарата АС-7, не приняла его в состав ВМФ СССР и дальнейшие работы признала нецелесообразными.
Мир-1 и Мир-2
Пожалуй самые известные подводные батискафы.

Мир-1 и Мир-2 — два советских и российских научно-исследовательских глубоководных обитаемых аппарата для океанологических исследований и спасательных работ. Основные идеи по конструкции аппарата, устройству его отдельных систем, узлов, элементов, по комплектованию научного и навигационного оборудования принадлежат И. Е. Михальцеву, его заместителю А. М. Сагалевичу и главному инженеру проекта от финской судостроительной компании Саули Руохонену, возглавлявшему группу финских инженеров и техников, принимавших участие в строительстве аппаратов. Глубоководные аппараты изготовлены в 1987 году финской компанией Rauma-Repola Oceanics, причём контракт на создание аппаратов был подписан 16 мая 1985 года, а приёмо-сдаточный акт — 17 декабря 1987 года, после успешных испытательных погружений в Ботническом заливе и в Атлантическом океане на максимальную глубину 6170 метров («Мир-1») и на глубину 6120 метров («Мир-2»). Огромное значение для научных исследований имеет рабочая глубина погружения «Миров» — 6000 метров, благодаря чему эти аппараты могут достигать глубин, на которых расположено 98,5 % дна Мирового океана. Стоимость постройки каждого аппарата в 1987 году составила 100 млн. финских марок (17 млн. евро).
Цзяолун

«Цзяолун» — китайский беспоплавковый глубоководный обитаемый аппарат. За период с 31 мая по 18 июля 2010 года совершил 17 погружений в Южно-Китайском море, самое глубоководное из которых — на глубину 6759 метров. Это событие сделало Китай пятой страной после США, Франции, России и Японии, обладающей современными технологиями погружений на глубину более 6500 метров.
Deepsea Challenger

Deepsea Challenger (DCV 1) — батискаф, на котором 26 марта 2012 года канадский режиссёр Джеймс Кэмерон в одиночку осуществил погружение в «Бездну Челленджера» (Марианская впадина). Подводный аппарат построен в Сиднее, Австралия, проектно-исследовательской компанией Acheron Project Pty Ltd. и содержит научное оборудование и 3D камеры с высоким разрешением. Deepsea Challenger был втайне построен в Австралии, в сотрудничестве с National Geographic и при поддержке Rolex. В строительстве батискафа и реализации миссии помощь оказали Скриппсовский институт океанографии, Лаборатория реактивного движения и Гавайский университет. Руководил строительством австралийский инженер Рон Аллум. Оценочная стоимость аппарата 7 млн. долларов.

В батискафе человек может погрузиться на любую глубину в океане и даже провести манипуляции по водой и что-нибудь поднять, но стоимость самих батискафов и их обслуживания достаточно высока.
Использование возможностей океана.
На картинке кратко приведены основные направления работы в океане, не считая поисково-спасательных работ:
- выращивание и добыча морепродуктов (рыба, моллюски, членистоногие, водоросли);
- добыча и транспортировка углеводородов (нефть, газ, газогидраты);
- добыча и транспортировка руды из железномарганцевых конкреций;
- захоронение опасных отходов;
- строительство и ремонт линейных сооружений (подводные оптоволоконные кабели, подводные электрические кабели, трубопроводы);
- поиск объектов под водой и картографирование.

Строительство и ремонт линейных сооружений
Испанская электроснабжающая компания Red Eléctrica de EspaÑa внедрила систему передачи электроэнергии постоянным током высокого напряжения (HVDC), соединяющую остров Майорка с единой энергосистемой континентальной Испании.
244-километровая система линий электропередачи постоянным током высокого напряжения соединяет район Морведре (близ Валенсии) с деревней Санта-Понса, расположенной рядом со столицей Майорки — Пальма-де-Мальорка. Электрическая мощность 400 МВт передается по кабелю, идущему по морскому дну, потери на передачу постоянного тока минимальные: 250 кВт.

Как можно видеть на рисунке, при работе на глубинах были использованы специальные механизмы. Для укладки кабеля используется специальный аппарат capjet [6], укладка контролируется необитаемыми телеуправляемыми подводными аппаратами (ROV).
Примерно также происходит укладка кабелей связи:

Операция по подъёма истребителя F14 Tomcat с глубины 1140 м возле мексиканского побережья. Во время операции использовались телеуправляемые подводные аппараты.

Очистка дна от сюрпризов войны при строительстве северного потока:

Добыча нефти на шельфе:

Примерно также, с помощью телеуправляемых аппаратов осваивается штокмановское месторождение.
Так аппарат выглядит живьём:

Так им управляют:

А вот что при этом видит оператор:

Телеуправляемые аппараты (ROV) производятся разных классов с разной глубиной погружения. Есть те, которые можно опускать на 4000 м, есть те, которые нельзя больше 300 м, стоимость их также отличается на порядки. Если аппараты, которые пригодны для работы на большой глубине стоят от 1 млн. долларов, то аппараты, которые работают на глубинах до 300 м стоят несколько десятков тысяч долларов в промышленном исполнении.
Помимо телеуправляемых аппаратов используются автономные необитаемые подводные аппараты (AUV). В основном их используют для поисковых операций, до июля 2018 года с 2014 года в Индийском океане искали пропавший самолёт малазийских авиалиний с помощью таких аппаратов.

Автономные подводные аппараты используются для мониторинга состояния подводных линейных сооружений (трубопроводы, кабельные линии), для картографирования поверхности дна и проведения научных исследований на большой площади. Большинство автономных аппаратов выполняется в виде торпеды, чтобы уменьшить лобовое сопротивление воды и тем самым увеличить длительность работы под водой на одном заряде батарей.

Также создаются гибридные системы, т.к. автономные аппараты, которые можно подключить кабелем для подачи питания и получения изображения с камер и данных с датчиков в режиме реального времени. Предполагается, что в ближайшие 5 лет AUV вытеснят ROV при работах на шельфе и обследовании трубопроводов, т.к. для работы с ROV требуется судно с динамическим позиционированием, которое может обходится до 250000 долларов в день, при этом работа промышленных AUV обходится в 30000 долларов в день [7]. Но для такой замены необходима мощная вычислительная бортовая система, производительная видеосистема, мощные и ёмкие аккумуляторы, точные датчики и сонары, а также разработка алгоритмов, которые смогут выполнять все те задачи в автономном режиме, которые выполняет оператор ROV в телеуправляемом режиме.

Добыча железомарганцевых конкреций

Железомарганцевые конкреции — аутигенные минеральные стяжения гидрооксидов железа и марганца, а также других элементов на дне озёр, морей и океанов. Наиболее широко распространены в пелагических районах Мирового океана. Впервые изучены английской экспедицией на судне «Челленджер» в 1872-76. Подробные сведения о железомарганцевых конкрециях (пространственное размещение, фациальная обстановка формирования, петрография, минералогия и геохимия) получены в результате исследований дна Мирового океана, проведённых исследователями различных стран (Великобритания, CCCP, США, ФРГ, Япония и др.) в период Международного геофизического года (1957-1958) и в последующие годы.
Оцениваемые запасы трех океанов составляют 200 млрд т., в Атлантическом океане содержится 45 млрд т., в Тихом — 112 млрд т., в Индийском океане — 41 млрд т. Месторождения, залегающие на относительно небольшой глубине и являющиеся типичными разновидностями залежей марганца, встречаются на глубине до 400 метров недалеко от берега Байя, Калифорнии и Японии. Конкреции у берегов Японии находятся на глубине от 100 до 360 метров на верхнем слое морского дна вдоль архипелага Аузу около Токио.
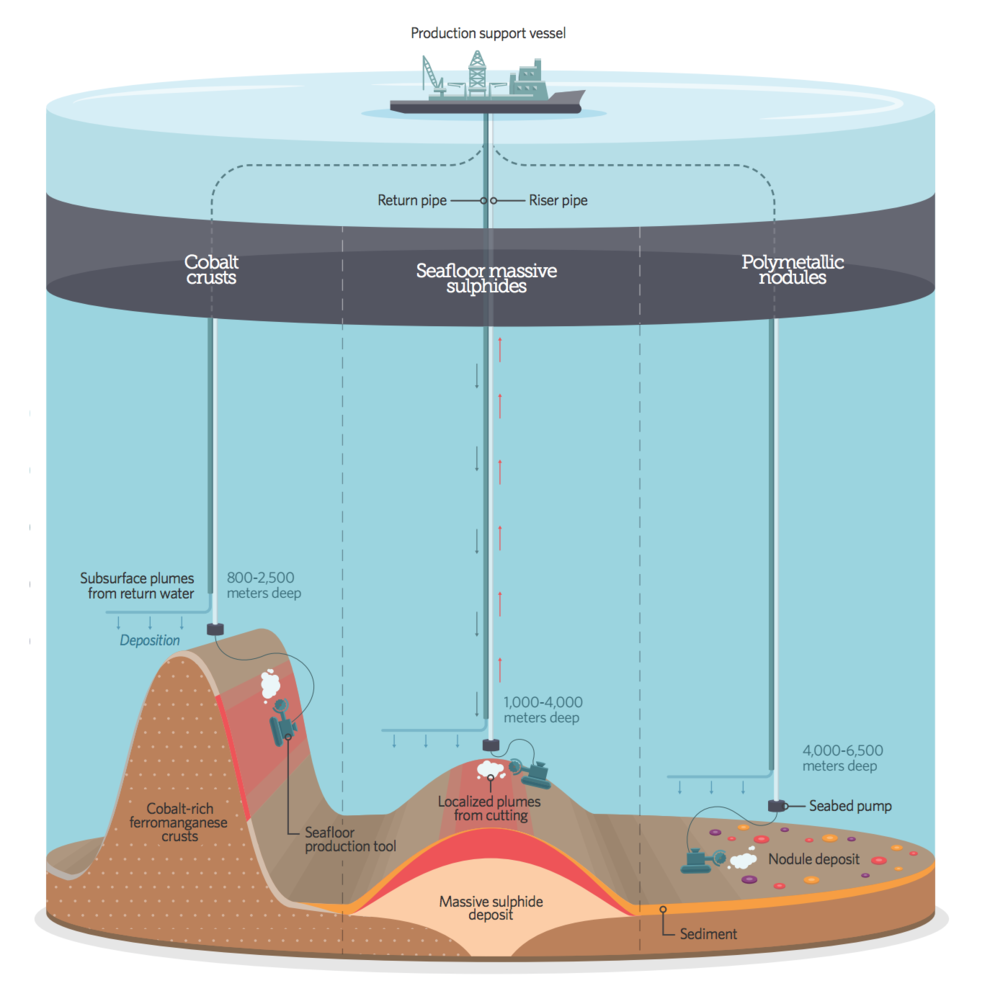
Фирма Nautilus Minerals Ltd. строит специальное судно для переработки руды, поднятой с дна океана [7].

Железомарганцевые конкреции Мирового океана в среднем содержат следующие рудные компоненты (%): Na 1,9409; Mg 1,8234; Al 2,82; Si 8,624; Р 0,2244; К 0,6427; Ca 2,47; Ti 0,647; V 0,0558; Cr 0,0035; Mn 16,02; Fe 15,55; Ni 0,480; Co 0,284; Cu 0,259; Zn 0,078; Sr 0,0825; Zr 0,0648; Mo 0,0412; Tl 0,0129; Pb 0,0900. Характерно наличие Ag, Ir, В, Cd, Yb, W, Bi, Y, Hg и других элементов, концентрации которых значительно превышают средние значения для земной коры. По средним содержаниям основных рудных компонентов (Ni, Cu, Co, Mn) железомарганцевые конкреции в пределах отдельных изученных районов сопоставимы с рудами месторождений, разрабатываемых на континентах.
На поверхности руда выглядит так:

Совсем скоро обещают наладить промышленную добычу.
Интерес
В целом, подводные аппараты или роботы с 2015 года рассматриваются как новый передний край роботов (The Next Big Drone Frontier)[8].
По прогнозам, рынок необитаемых подводных аппаратов (UUV) достигнет 5,20 млрд. долл. США к 2022 году, при этом CAGR составит 14,07% с 2017 года по 2022 год. Рост рынка можно объяснить ростом числа глубоководной морской добычи нефти и газа и увеличения угроз морской безопасности.
В целом интерес к подводной робототехнике достаточно высок в США, Китае, ЕС и Сингапуре.
Патентные исследования подтверждают это.
География стран, которые регистрировали патенты в области подводной робототехники:

Распределение по количеству поданных заявок:

Видно, что на первое место сейчас вырвался Китай и через несколько лет мы увидим разработки в железе и далее в росте экономических показателей.
Сегментация используемых технологий по данному направлению:

Список производителей подводной робототехники.
Естественно работа ведётся со студентами и школьниками. Ведь в ближайшие несколько лет все эти разработки пойдут в промышленность и потребуются специалисты для работы с создаваемыми подводными аппаратами.
Показателем наличия такой работы является наличие соревнований по подводной робототехнике:
- MATE International ROV Competition (ежегодно с 2002 года)
- AUVSI RoboSub Competition (ежегодно с 1997 года)
- Singapure AUV Challenge (ежегодно с 2013 года)
- Student Autonomous Underwater Challenge-Europe (SAUC-E) (ежегодно с 2006 года)
MATE International ROV Competition

Наиболее массовые соревнования. В США порядка 600 учебных заведений заявляют об участии в отборочных турах. Делятся на школьные и студенческие соревнования в различных классах:
- Explorer — студенческие;
- Ranger — старшие школьники;
- Navigator — средняя школа;
- Scout — младшие школьники.
Успешно выступают команды из Владивостока:
Российская команда на международных соревнованиях по подводной робототехнике (2009 год)
The DVFU ROV Team 2010
Российская команда стала двукратным чемпионом мира по подводной робототехнике (2012 год)
2013 год
Школьники Центр развития робототехники (2015 год)
Школьники и студенты Центр развития робототехники (2018 год)
ROBOSUB


Наиболее престижные соревнования для студентов. Спонсируется ассоциацией фонда беспилотных транспортных средств и Управлением военно-морских исследований. Участвуют студенческие команды со всего мира. В 2018 году победили китайцы из Harbin Engineering University, второе место National University of Singapore. Успешно выступают студенты ДВФУ и МГУ им. Невельского.
RoboSub 2012 разведка боем и выход в финал
Singapure AUV Challenge
Соревнование по автономным подводным аппаратам. Участвуют студенты стран АТР. Успешно выступают студенты ДВФУ.
Student Autonomous Underwater Challenge-Europe
К сожалению, не знаю участников из России.
Что же у нас?
До 600+ команд, как в США, нам пока далеко, но интерес тоже есть:
- MATE ROV Competition Vladivostok (отборочный тур на большой MATE, с 2015 года);
- ВРО Водные ИРС (в Иннополисе с 2016 года);
- Олимпиада НТИ водный профиль (с 2017 года);
- Первые всероссийские соревнования по подводной робототехнике Владивосток 2018 (август-сентябрь 2018);
- Первый конкурс по подводной робототехнике для учеников 1-4 классов (2018-2019 год).
MATE ROV Competition Vladivostok
Проводятся во Владивостоке на базе бассейна МГУ им. Невельского. Регистрация с декабря по март.
Описание тут.
Новости тут и тут.
Видео тут.







ВРО Водные ИРС
Проводились в рамках финала Всероссийской робототехнической олимпиады в г. Иннополис в конце июня. На 2019 года пока неизвестно будет ли Иннополис проводить финал ВРО.
Регистрация открывается весной.
Олимпиада НТИ водный профиль
Регистрация уже началась
Первые всероссийские соревнования по подводной робототехнике Владивосток 2018 (Аквароботех 2018)
Уже прошли. Почитать можно про них тут и тут.
Посмотреть тут.
Первый конкурс по подводной робототехнике для учеников 1-4 классов
Правила конкурса тут.
Регистрация заканчивается 30 сентября.
Предложение
Мы можем предложить следующие наборы для занятий подводной робототехникой:
- Micro Underwater Robot (MUR) — набор рекомендован для НТИ и ВРО.
- Набор для сборки телеуправляемого робота MUR MiddleROV
- Набор для сборки телеуправляемого робота MUR ElementaryROV
- MUR HighROV — для участия в MATE (под заказ)
Подробнее на сайте Центра робототехники
Источники
[1]https://en.wikipedia.org/wiki/Freediving
[2]https://topwar.ru/128503-vodolazy-tof-ustanovili-rekord-po-glubine-pogruzheniya.html
[3]http://www.dive-tek.ru/archiv/2008/2/38-41.html
[4]http://divingalmanac.com/deepest-saturation-dive-open-sea/#!
[5]http://divingalmanac.com/deepest-saturation-dive-experimental/
[6] http://www.nortech.com/pdf-subsea/Capjet%20trenching%20system.pdf
[7]http://nus.live.irmau.com/irm/content/default.aspx
[8]http://sophiccapital.com/wp-content/uploads/2016/02/Sophic-Capital-Second-Underwater-Drones-Report.pdf
[2]https://topwar.ru/128503-vodolazy-tof-ustanovili-rekord-po-glubine-pogruzheniya.html
[3]http://www.dive-tek.ru/archiv/2008/2/38-41.html
[4]http://divingalmanac.com/deepest-saturation-dive-open-sea/#!
[5]http://divingalmanac.com/deepest-saturation-dive-experimental/
[6] http://www.nortech.com/pdf-subsea/Capjet%20trenching%20system.pdf
[7]http://nus.live.irmau.com/irm/content/default.aspx
[8]http://sophiccapital.com/wp-content/uploads/2016/02/Sophic-Capital-Second-Underwater-Drones-Report.pdf

