
Робот Octobot. Фото: Институт бионической инженерии им. Висса
В последние годы учёные активно экспериментируют с мягкой электроникой. Мягкие эластичные предметы вообще удобнее в жизни, чем твёрдый металл и пластик. Это касается практически любых объектов. Электроника и роботы здесь не исключение. Поэтому вполне логично предположить, что будущее — именно за мягкими роботами. Такие эластичные и упругие кибернетические существа будут надеваться на голову и натягиваться на тело, приниматься внутрь. Они не боятся воды и коррозии, могут скользить или скатываться по наклонным поверхностям. Им не страшны повреждения, деформация и т.д. — у них много преимуществ перед жёсткими конструкциями [1] [2]. А ещё их так приятно гладить и похлопывать по упругому тельцу.
Полностью мягкие механизмы без единой твёрдой детали создавались и раньше, но это были довольно примитивные роботы вроде гусеницы. Сейчас инженеры из Гарвардского университета добились успеха, показав первого в мире полностью мягкого автономного робота Octobot в образе симпатичного осьминога, который двигается за счёт химической реакции восстановления перекиси водорода (H2O2).
Авторы изобретения из гарвадского Института бионической инженерии им. Висса считают, что такие роботы уже пригодны для массового производства по несложному техпроцессу, включая мягкие элементы питания и мягкие электронные схемы. Этот простой дизайн может стать ключевым компонентом для создания более сложных мягких роботов будущего.
Бóльшая часть деталей Octobot напечатана на 3D-принтере, а затем в его тело инкрустированы электропроводящие цепи и газовые сосуды методом литографии.

Газовые сосуды вдавливаются методом литографии. Иллюстрация: Институт бионической инженерии им. Висса
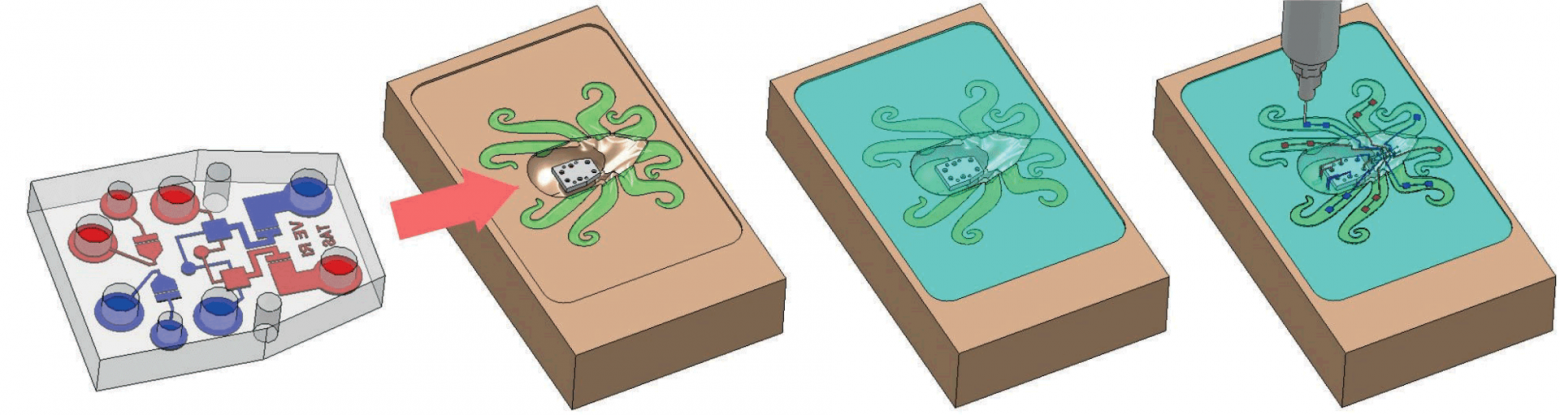
Технический процесс изготовления Octobot. Фото: Институт бионической инженерии им. Висса
Робот двигается за счёт газа, выделяемого из перекиси водорода — топлива. Жидкость перемещается по телу, а газ вздувает конечности. Учёные сконструировали хитрую сеть микрососудов для перемещения жидкости по всему телу. Эта сеть сосудов спланирована так, что при вздутии одних фрагментов конечностей сдуваются другие, в заранее определённой последовательности, которая позволяет роботу передвигаться. Алгоритм вздутия и сдутия реализован в простой логической схеме.

Логическая схема робота. Иллюстрация: Институт бионической инженерии им. Висса
Робот работает на 50% растворе перекиси водорода. Для сравнения, в большинстве бытовых продуктов обычно используется раствор 5%.
Робот может двигать конечностями самостоятельно, без внешнего управления, поэтому его считают автономным. Изменение давления в конечностях — основной способ передвижения для всех мягких роботов, и сейчас учёные впервые нашли способ запустить этот процесс полностью в автономном режиме.
Перекись водорода мгновенно распадается на воду и газообразный кислород при контакте с платиной на стенках каналов — в тех районах, где и происходит вздутие конечностей. Химическая реакция с перекисью водорода концентрацией 50% и 90% показана в видеоролике.
Газ занимает в 160 раз больше объёма, чем жидкость. За счёт этого Octobot двигает конечностями. Сейчас он может двигать щупальцами от 4 до 8 минут на одном миллилитре раствора перекиси водорода.
Сеть микрососудов спроектирована при участии известного химика Джорджа Уайтсайдса, лауреата множества престижных премий (согласно Википедии, это 1-й по цитируемости химик в мире за период с 1992 по 2002 годы, а также 1-й в мире по цитируемости из ныне живущих химиков в 2011 году, индекс Хирша = 169). Он тоже работает в Институте бионической инженерии им. Висса.

Сеть микрососудов робота Octobot под микроскопом. Иллюстрация: Институт бионической инженерии им. Висса
Конструкция выглядит многообещающе для некоторых сфер использования роботов, в том числе внутри человеческого тела. Конечно, физико-химическая автономная система сама по себе проще, чем привычные автономные роботы с компьютерным управлением, но это первая в мире такая конструкция, так сказать, proof-of-concept, то есть доказательство жизнеспособности идеи. Форм-фактор осьминога выбрали произвольно: «Мы решили, что осьминог просто выглядит классно, — говорит Майкл Венер (Michael Wehner), ведущий автор научной работы. — Мы подумали, что такой прикольный осьминог поможет привлечь людей в мягкую робототехнику».
В следующей версии разработчики хотят научить Octobot плавать и взаимодействовать с окружающими объектами. Для этого придётся усложнить его логическую схему и, возможно, усложнить сеть микрососудов.
Сейчас этот осьминог выглядит смешно и бесполезно, но он даёт возможность представить будущее, в котором мягкие автономные роботы станут реальными.
Научная работа «Интегрированный дизайн и стратегия производства полностью мягких, автономных роботов» опубликована 24 августа 2016 года в журнале Nature (doi:10.1038/nature19100, pdf).
Литература
[1] Rus, D. & Tolley, M. T. Design, fabrication and control of soft robots. Nature 521, 467–475 (2015). Вернуться к статье
[2] Wang, L. & Iida, F. Deformation in soft-matter robotics: a categorization and quantitative characterization. IEEE Robot. Autom. Mag. 22, 125–139 (2015). Вернуться к статье

