
Хабр Курсы для всех
РЕКЛАМА
Практикум, Хекслет, SkyPro, авторские курсы — собрали всех и попросили скидки. Осталось выбрать!
Наверное, у каждого, кто изучал теорию автоматического управления, в душе не раз появлялись сомнения, каким образом эти два, три или даже десять квадратиков передаточных функций в модели, представляют собой динамику сложного агрегата, типа ядерного реактора или авиационного двигателя.
Это полный провал, регулятор ПИД, настроенный на повышение частоты оборотов, не справился с понижением частоты.
Да перебор параметров блоком оптимизации по критерию минимизации среднеквадратичного отклонения.
Но и нечеткая логика настроена таким же методом.
Смело. С чего бы это?
 "
" Симулинк отлично умеет подключать внешние библиотеки, хоть на фортране, хоть на Си, хоть собственно скомпилированные. Это ответ и на моделирование физики, и на количество блоков.
Все верно, только вопрос времени и наглядности. В этом случае пришлось бы прикручивать чужой код на Фортране (двигатель) чужой код на Паскале (Гидравликa) алгоритмы в SimInTech к Simulink. Задача небольшого проекта месяцев так на 2-5. Зачем? Что бы оптимизировать? Так проще специализированные оптимизаторы прицепить к модели общей SimInTech.
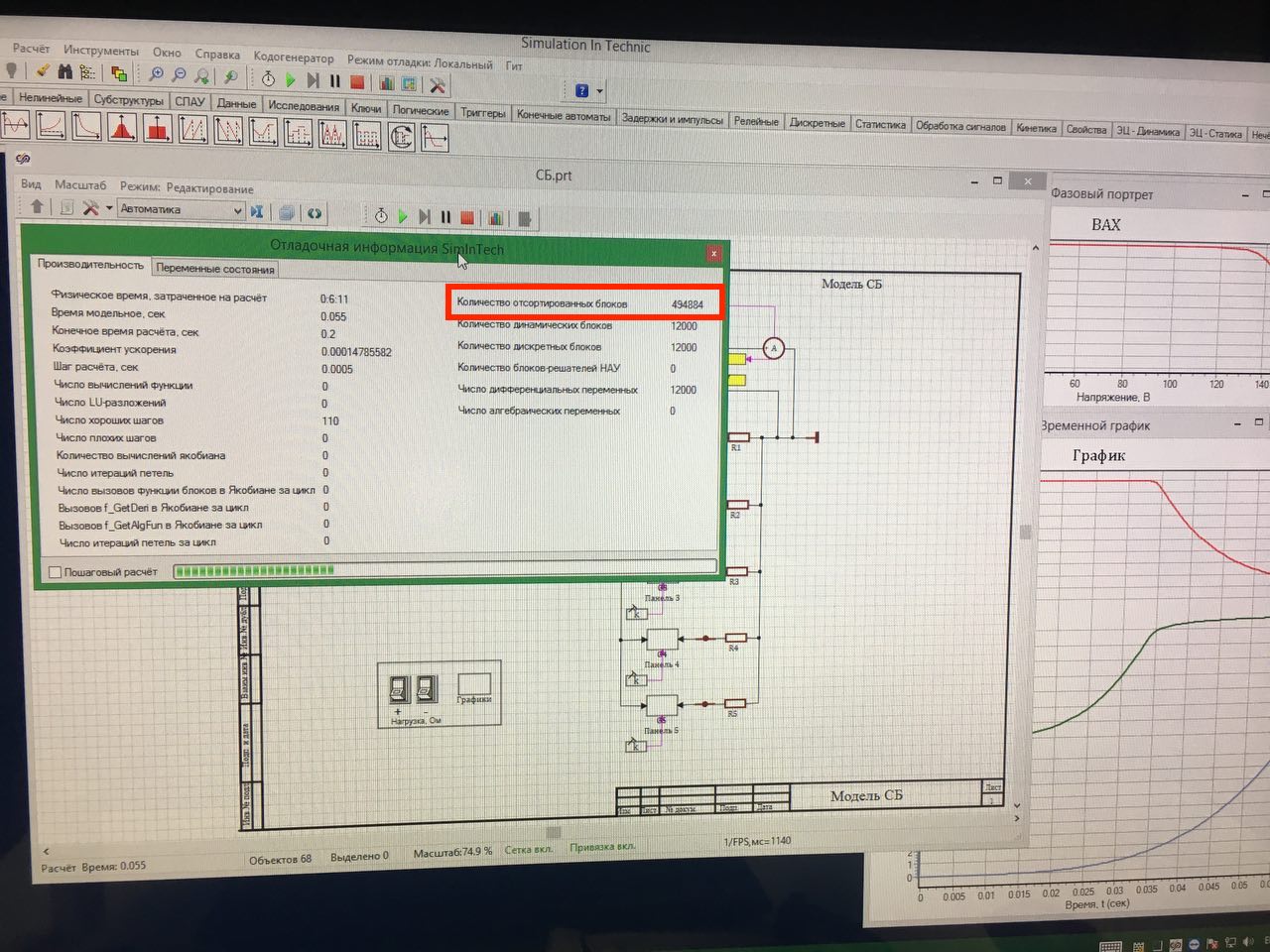
А сам Симулинк плохо переносит увеличение количества блоков в модели за 500
Вы поясните, а о чем речь? Если вы говорите о моделировании, то слабо верится, так как симулинк при инициализации моедли её "компилирует", и после этой стадии дальнейшие процессы на количество блоков не завязаны.
Видимо, вы говорите о написанном на Java кросс-платформенном графическом интерфейсе. Я сейчас быстро сделал модель с 3000 блоков (вложенных), у меня все отлично работает. Может, вы 500 элементов на один лист накидали?
Если вы продвигаете свою альтернтивную разработку, то может лучше делать это за счет её преимуществ, а не поиска недостатков у лидера рынка?
 "
"А можно картинки в более высоком разрешении выложить?
Просто на картинках в статье ничего не разобрать. В частности ПИД-регулятор интересен, отклик на сброс уставки очень напоминает integral windup, как это по русски, интегральное насыщение? В регуляторе на этот случай что предусмотрено?
В турбореактивном двигателе полезная мощность это реактивная тяга
В гражданских самолётах основную тягу создаёт передний вентилятор, кстати.
Зона нечувствительности у нас 1% от максимальных оборотов – это 40 об/мин. Зададим белый шум равным 50 об/мин.
Управлять ПИД регулятором на низких оборотах оказалось невозможно.Не совсем корректный вывод. Объекты разные, и коэффициенты ПИД регулятора надо подбирать либо под наихудший объект, либо делать переменными и варьировать от параметров.
клапан. Давление на одной стороне трубы задаём постоянным, считая что там работает топливный насос

 "
"Внесу свои 2 копеек:

Нечеткая логика против ПИД. Скрещиваем ежа и ужа. Авиадвигатель и алгоритмы управления АЭС