Модель сегрегации Шеллинга – это агент-ориентированная модель, которая иллюстрирует, как индивидуальные тенденции в отношении соседей могут привести к сегрегации. Модель особенно полезна для изучения жилищной сегрегации этнических групп, где агенты представляют домовладельцев, которые переселяются в город. В модели каждый агент принадлежит к одной из двух групп и стремится жить в районе, где доля "друзей" достаточно высока: выше определенного порогового значения F. В зависимости от F, для групп равного размера, модель проживания по Шеллингу сходится либо к полной интеграции (случайное распределение), либо к сегрегации.
Изучение этнических жилых моделей израильских городов с высоким разрешением показывает, что реальность сложнее, чем эта простая дихотомия интеграции-сегрегации: некоторые районы этнически однородны, в то время как другие населены обеими группами в различном соотношении.
В данном исследовании мы изучаем, может ли модель Шеллинга воспроизвести такие модели; исследуем динамику модели с точки зрения зависимости от порогов толерантности для конкретных групп и от соотношения размеров двух групп; выявляем новый тип распределения, в которой часть одной группы сегрегированна, а другая часть остаётся интегрированной со второй; сравниваем характеристики этих новых моделей с моделями реальных городов и обсуждаем различия.
1. Введение
Модель сегрегации Шеллинга является одной из самых ранних агент-ориентированных моделей в социальной науке. Модель была представлена Томасом Шеллингом для иллюстрации того, как индивидуальные стимулы и индивидуальное восприятие различий могут привести к сегрегации. Хотя модель показательна для целого ряда явлений, когда люди склонны переселяться в зависимости от доли похожих соседей, она была признана особенно полезной для изучения сегрегации по месту жительства.
Исходная модель
В модели Шеллинга агенты занимают ячейки прямоугольного пространства. Ячейка может быть занята только одним агентом. Агенты принадлежат к одной из двух групп и могут перемещаться в зависимости от доли друзей (т.е. агентов своей группы) в окрестностях своего местоположения. Основное предположение модели заключается в следующем: агент, находящийся в центре района, где доля друзей f меньше предопределенного порога толерантности F (f < F), попытается переместиться в район, где доля друзей не меньше f (f ≥ F). Обратите внимание, что высокое пороговое значение F соответствует низкой толерантности агента к присутствию незнакомцев в районе.
Шеллинг изучил динамику, порождаемую этим простым правилом перемещения, для случая двух групп одинакового размера и общего порога толерантности F для обеих групп. Исследование показало существование критического порога толерантности Fsgr ≈ 1/3, при котором для F < Fsgr распределение остаётся случайным, а для F ≥ Fsgr сходится к сегрегированному виду.
 начальное состояние одного из экспериментов Шеллинга; (b) стабильный сегрегированный вид, полученный в результате нескольких итераций")
Два результата исследования Шеллинга считаются центральными:
значение Fsgr существенно ниже интуитивно ожидаемого значения 1/2;
изменение паттерна от псевдослучайного к сегрегированному, по мере того, как F переходит значение Fsgr, является резким, поэтому модель не производит промежуточных паттернов.
Модель Шеллинга в сравнении с реальными моделями проживания
Динамика реального проживания в основном определяется экономическими факторами, поэтому модели Шеллинга обычно рассматриваются как имеющие больше теоретическое, чем прикладное значение. Однако в некоторых случаях можно установить прямое соответствие между моделями и реальными распределениями населения. Наше исследование мотивировано одним из таких случаев: распределение еврейско-арабского этнического населения в городах Израиля. На основе переписи населения Израиля 1995 года мы смогли построить модели для этнически смешанных израильских городов на уровне отдельных домов, что эквивалентно разрешению модели Шеллинга.
Эмпирические данные подтверждают шеллинговский взгляд на взаимодействие между еврейскими и арабскими семьями в Израиле; и те, и другие стремятся жить в районах, где проживает достаточное количество представителей их этнической группы. Таким образом, мы можем рассматривать жилые модели в смешанных израильских городах как "стилизованный" результат выбора жилья агентами Шеллинга.
Мы рассмотрим структуру проживания арабов-мусульман, арабов-христиан и евреев в городах Яффa и Рамлa, расположенных в центральной части Израиля. Яффa фактически является южной частью города Тель-Авив-Яффa, а Рамлa расположен в 15 км к юго-востоку от Яффы. Этническая структура Яффы в 1995 году представлена на рисунке ниже. В городе есть сегрегированные арабские и еврейские районы; в Аджами, районе в центре (зона A), христиане и мусульмане живут вместе, а в Яффо-Далет, районе на юге (зона B), население составляют евреи. Некоторые границы между еврейскими и арабскими районами в Яффе резкие (район D), а некоторые – расширенные (район C).

Этническая структура проживания в Рамле является более сложной, чем в Яффе. Большие районы города населены почти исключительно евреями (район A), а некоторые – почти исключительно мусульманами (район B). В городе есть интегрированные районы (район C), которые, в отличие от Яффы, удалены от сегрегированных арабских районов. В городе также есть районы, населённые мусульманами и христианами (район D), и район, где сосуществуют христиане и евреи (район E).

Можно предложить несколько объяснений этого качественного различия между наблюдаемыми закономерностями и теоретическими закономерностями Шеллинга. Во-первых, игнорируя экономику, модели Яффы и Рамлы всё ещё находятся на стадии развития, поэтому некоторые из них могут быть временными. Во-вторых, малообеспеченные евреи и арабы, возможно, не могут избежать совместного проживания, в то время как более богатые евреи и арабы способны к сегрегации. В-третьих, вопреки предыдущему объяснению, бедные евреи и арабы могут быть нетерпимы друг к другу и поэтому стремиться к сегрегации, в то время как богатые домовладельцы могут быть терпимы и поэтому держаться вместе.
Каждое из этих объяснений можно было бы проверить, если бы имелись данные о миграционной активности и индивидуальном богатстве. Однако, взяв за основу модели Яффы и Рамлы, можно ли объяснить наблюдаемые закономерности в рамках неэкономической концепции Шеллинга?
Для упрощения рассмотрим арабов-мусульман и арабов-христиан как единую группу. Концептуально, в еврейско-арабских жилых моделях в Яффе и Рамле можно выделить три качественно различных конфигурации:
 два сегрегированных паттерна; (b) сегрегированный паттерн, примыкающий к интегрированному паттерну; (в) интегрированный паттерн, примыкающий к двум сегрегированным паттернам.")
В первой модели (a) две сегрегированные группы разделены узкой границей перехода. Во второй модели (b) большинство членов одной из групп сегрегированы, в то время как некоторые из них интегрированы с членами другой группы. Третий и самый сложный паттерн (c) представляет собой две сегрегированные группы, каждая из которых примыкает к интегрированной области.
В данной работе мы демонстрируем, что разнообразие паттернов модели Шеллинга больше, чем дихотомия интегрированный-сегрегированный, и что паттерны (a) и (b) могут быть сгенерированы моделью, если количество двух групп или пороги толерантности групп различны. Однако модель Шеллинга не генерирует устойчивые паттерны, содержащие сегрегированные участки обеих групп вместе с интегрированными участками, как на модели (c).
Структура статьи выглядит следующим образом: в разделе 2 представлен современный уровень исследований модели Шеллинга и описан тип динамики, порождающей модели, которые не являются ни сегрегированными, ни интегрированными (мы называем их смешанными). В разделе 3 формально описывается модель и методология исследования. Результаты исследования представлены в разделе 4 и сопровождаются обсуждением в разделе 5.
2. Исследования модели Шеллинга
Неравномерное разделение пространства
Исследования модели Шеллинга сосредоточены на условиях способствующих сегрегации и на их характеристиках. Как и следовало ожидать, результаты модели качественно устойчивы к структуре распределения. Нерегулярное разбиение плоскости на полигональные единицы и определение соседства на основе смежности полигонов не меняют основных результатов дихотомии паттерна и резкого перехода от интегрированного к сегрегированному предельному виду (Flache and Hegselmann 2001). Laurie и Jaggi (2002, 2003) дополнили этот вывод, систематически исследуя динамику модели Шеллинга в зависимости от размера окрестностей, и обнаружили, как и следовало ожидать, что размер однородных пятен увеличивается с ростом радиуса окрестности, в то время как количество однородных пятен в паттернах уменьшается.
Асимметричные отношения, более двух групп
Portugali и др. (1994, 1995) показали, что модели Шеллинга сходятся к сегрегации, даже если только агенты одной группы реагируют на долю друзей, а агенты другой группы безразличны. Однако в этом случае порог толерантности, разделяющий системы, сходящиеся к интегрированным и сегрегационным моделям, существенно выше, чем значение 1/3, характерное для симметричного случая. Benenson (1998) исследовал модель Шеллинга для случая нескольких групп агентов, характеризующихся несколькими бинарными характеристиками. Помимо интегрированных и сегрегированных стабильных моделей, он выявил нестабильные, но устойчивые режимы, в которых однородные модели агентов одной или нескольких групп неоднократно самоорганизуются и исчезают.
Учёт экономических различий между агентами
В ряде исследований (Benard и Willer 2007; Benenson 1999; Fossett 2006; Portugali 2000; Benenson и Hatna 2009) рассматриваются агенты, характеризующиеся постоянным "экономическим статусом", который можно сопоставить с ценой клеток. Агенты ищут районы, которые одновременно являются "дружелюбными" и "достаточно богатыми". Как и следовало ожидать, динамика системы в этом случае становится более изменчивой, в зависимости от того, как предпочтения агентов в отношении жилья зависят от групповой принадлежности и статуса соседей.
Агенты, которые обмениваются местами
Качественно иной способ моделирования переселения агентов заключается в предположении, что неудовлетворённые агенты обмениваются своими местами, а не ищут вакантные места по всем незанятым клеткам. Эта точка зрения привлекла внимание ряда исследователей (Pollicott и Weiss 2001; Zhang 2004), которые также предполагают, что предпочтения агентов немонотонны, и они могут предпочитать районы с низкой долей иностранцев районам, занятым исключительно друзьями. Динамика моделей в этом случае также более сложна, чем дихотомия "интегрированный-сегрегированный". Однако математические свойства этих моделей качественно отличаются от стандартных установок, и поэтому мы рассматриваем эту формулировку как отличную от оригинальной модели Шеллинга.
Модель "ограниченного соседства"
Другим вариантом модели Шеллинга является модель "ограниченного соседства", которая также была представлена Шеллингом, но менее популярна, чем рассмотренная выше версия. В версии "ограниченного соседства" вместо регулярной сетки пространство делится на блоки, которые по сути больше, чем кварталы в популярной версии модели. Независимо от того, где находится агент в пределах блока, он реагирует на долю друзей по всему блоку и покидает блок, если доля друзей ниже порога толерантности F. Однако разные агенты могут реагировать на разные пороговые доли друзей в пределах блока, и основным параметром модели "ограниченного соседства" является распределение F-значений агентов.
Аналитическое исследование этой версии модели было начато Шеллингом, которое продолжил Clark (1991, 1993, 2002, 2006). Они показали, что обе группы могут сохраняться в блоке в том случае, если агенты каждого типа существенно различаются по своей толерантности к чужакам. Однако равновесие не является глобально стабильным, и, в зависимости от начальных условий, население блока может сходиться к сегрегированному или интегрированному состоянию при одинаковых распределениях толерантности.
Пространственная версия модели, в которой население агентов состоит из более чем двух этнических групп, а агенты реагируют на структуру населения и мигрируют между соседними кварталами в случае неудовлетворения, была подробно исследована в серии симуляций (Fossett и Waren 2005; Fossett 2006; Fossett 2006), в которых автор также напрямую связал результаты модели с моделями проживания в реальных городах. Автор стремился отразить ситуацию в США и рассматривал три этнические группы населения, которые также различаются по своему экономическому статусу. В качестве агрегатных единиц использовались блоки ячеек 7×7, а город был представлен сеткой блоков 12×12. Автор исследовал взаимосвязь между этнической и статусной сегрегацией и пришел к выводу, что это взаимодействие может ограничить нашу способность интегрировать этнические группы. В частности, он отметил, что снижение дискриминации в жилищной сфере по расовому признаку не обязательно приведёт к значительному снижению этнической сегрегации.
Применение модели Шеллинга для реальных городов
Несколько попыток применить модель Шеллинга к реальной ситуации (Benenson и др. 2002; Koehler и Skvoretz 2002; Bruch и Mare 2006) дают приближение к сегрегации или более сложному распределению жилья, наблюдаемых в городах. В дальнейшем мы ограничиваемся абстрактными моделями и не углубляемся в детали этих реализаций.
"Жидкая" и "твёрдая" динамика
Общее представление о связи между правилами и закономерностями, порождаемыми моделью Шеллинга, предложили Vinkovic и Kirman (2006), которые рассматривают непрерывный аналог модели Шеллинга. А именно, они начинают с представления восьми клеток окрестности 3×3 как восьми равных секторов, а затем ослабляют дискретное представление пространства, рассматривая угол каждого сектора как непрерывную переменную. Непрерывное представление позволяет описать динамику модели с помощью дифференциальных уравнений и далее исследовать динамику границ однородных кластеров.
Анализ непрерывной модели приводит к выделению двух основных типов правил перемещения для модели Шеллинга: правила, которые определяют систему Шеллинга с "жидкой" и "твёрдой" динамикой (Vinkovic и Kirman 2006). "Твёрдая" динамика возникает если правила позволяют только перемещение в лучшее место. В этом случае система замирает при сближении с моделью, в которой ни один из агентов не может улучшить свое состояние. Обычно твёрдая модель Шеллинга замирает примерно через десять шагов, при этом существенная доля агентов недовольна своим местоположением, но не может найти лучшее. Правила, позволяющие перемещаться в клетки с одинаковой удовлетворённостью, приводят к подвижной системе. "Жидкая" модель Шеллинга не останавливается, даже если все агенты довольны своим местоположением, и, в конце концов, достигает устойчивого состояния, когда характеристики паттерна (такие как уровень сегрегации) не меняются. В этом состоянии подавляющее большинство агентов довольны своим местоположением, а редкие миграции приводят к медленной и ненаправленной эволюции границ участка.
Авторы работы демонстрируют, что устойчивые паттерны модели, допускающей переселение только в лучшие места, многочисленны и зависят от деталей правил модели, в то время как устойчивых паттернов "жидкого" представления о переселении всего два: интегрированный и сегрегированный. Они также утверждают, что динамика модели устойчива к изменениям в деталях правил в той мере, в какой набор правил приводит к динамике "твёрдой" или "жидкой" модели.
Дихотомия твёрдое-жидкое является относительно новой, и в известных нам исследованиях модели Шеллинга не уточняется, разрешают ли правила модели переселяться агентам между клетками с одинаковой удовлетворённостью. Однако, если применить взгляд Шеллинга к реальному миру, представляется необходимым разрешить переселение между такими клетками, чтобы отразить многочисленные причины миграции, которые не учитываются взглядом, основанным на соседстве и этнической принадлежности, например, расстояние до социальных объектов или работы.
Следуя взглядам авторов, мы исследовали набор правил, который, с одной стороны, напрямую интерпретирует идею Шеллинга о реакции жителя на долю друзей по соседству как критерию выбора места жительства, а с другой – позволяет миграцию между клетками с одинаковой удовлетворённостью, то есть соответствует жидкоподобной динамике (Benenson и Hatna 2011). Исследование модели выявило качественно новые результаты: разнообразие ее паттернов превосходит интегрированно-сегрегированную дихотомию. А именно, для достаточно широкого диапазона параметров модель сходится к смешанному состоянию, в котором существенная часть одной группы отделяется, а остальные её члены остаются интегрированными с другой группой.
Смешанные паттерны
Смешанные паттерны качественно отличаются от хорошо известных сегрегированных и интегрированных. Для иллюстрации рассмотрим город с соотношением размеров групп 0.2:0.8. В этом случае для значений F в интервале (0.08, 0.17) изначально случайный паттерн со временем сходится к состоянию, при котором часть территории занята исключительно большей группой, а остальная часть агрегирована. Как мы показали численно и подтвердили аналитически (Benenson и Hatna 2009; Benenson and Hatna 2011), значения F, которые генерируют смешанные паттерны, ниже, чем Fsgr.
 интегрированные (b) смешанные и (c) сегрегированные устойчивые паттерны, полученные с помощью модели Шеллинга для соотношения размеров 0.2:0.8 синего и зелёного цветов")
Смешанные паттерны ещё больше подрывают мнение о том, что модель Шеллинга устойчива к вариациям предположений. Качественно разные паттерны, полученные для неравных групп, показывают возможность того, что возникновение реальных паттернов проживания, представленных на рисунках 2-4, всё же может быть качественно объяснено моделью Шеллинга. Отклонение от соотношения размеров групп 1:1 является лишь одним из нескольких возможных изменений "общепринятых" параметров. Эти установки, однако, являются лишь традицией и не связаны с основным предположением Шеллинга об агентах, которые стремятся жить в дружественных районах. Существует ещё несколько классических установок, например, предположения о равном пороге толерантности членов обеих групп, одинаковой реакции агентов данной группы на соседей и одинаковом представлении агентов о размере и форме района.
В данной работе мы исследуем два изменения стандартных предположений: мы изучаем динамику модели Шеллинга в случае неравных групп и неравных порогов толерантности групп (которые по-прежнему одинаковы для всех агентов внутри группы). Мы демонстрируем, что смешанные паттерны типичны для высоко, но не абсолютно толерантных агентов, и обсуждаем, в какой степени этот формальный результат может объяснить реальные модели проживания, наблюдаемые в Яффе и Рамле.
3. Формализация модели и методология исследования
В данной работе мы применяем правила моделирования, определенные в Benenson и Hatna 2011.
Формальное представление правил модели
Обозначения: агент – a; клетка – h; окрестность h, исключая саму h – U(h).
Мы рассматриваем U(h) как квадратную окрестность Мура размером n×n и обозначаем долю "друзей" агента a (т.е. агентов, принадлежащих к группе агента a) среди всех агентов, находящихся в окрестности U(h), как fa(h). Обратите внимание, что мы игнорируем пустые клетки в пределах U(h).
Городское пространство: N×N сетка ячеек на торе, где последний используется для предотвращения граничных эффектов. В одной клетке не может находиться более одного агента. Эмиграция и иммиграция отсутствуют.
Существуют две группы агентов: синие (B) и зелёные (G).
Время: дискретное время, асинхронное обновление (Cornforth и др. 2005). Мы следуем взгляду Шеллинга на поведение жителей и предполагаем, что агенты наблюдают за изменениями в системе сразу после их возникновения. На каждом временном шаге каждый агент решает, переселяться ли ему и куда. Агенты рассматриваются в случайном порядке, который устанавливается заново на каждом временном шаге.
Порог толерантности агента Fa: следуя мнению Шеллинга, мы предполагаем, что агент a, находящийся в h, удовлетворён, если доля друзей в U(h) равна Fa или выше. Поскольку порог толерантности является общим для всех агентов синей или зелёной группы, мы обозначаем его как FB и FG соответственно.
Удовлетворённость U(h) соседства для a: мы определяем удовлетворённость ua(h) соседства U(h) для a как:
ua(h) = min(fa(h), Fa)/Fa, если Fa > 0
и предположим, что ua(h) = 1, если Fa = 0 (абсолютно толерантный агент a)
: (a) абсолютно терпимый агент (Fa = 0) (b) агент, ищущий 50% друзей (Fa = 0.5) (c) абсолютно нетерпимый агент (Fa = 1)")
Поведение агента: на каждом временном шаге t агент a, находящийся в h, решает, переехать или остаться в h. При переезде агент a рассматривает w вакантных мест и сравнивает потенциальную удовлетворённость ими с удовлетворённостью своим текущим местом h. Информированность агента a о вакантных местах не зависит от расстояния до h.
Агент a принимает решение о перемещении в два этапа:
Этап 1. Решает, стоит ли переезжать:
Генерируется случайное число p, равномерно распределённое на (0, 1).
Если (ua(h) < 1 или (ua(h) = 1 и p < m)), то пытается переместиться, иначе остаётся на h. [m – вероятность спонтанного переселения]
Этап 2. Если принято решение "переехать", то производится поиск нового места и решается, стоит ли туда переезжать:
Сохраняется удовлетворённость ua(h) текущим местоположением h.
Строится набор V(a) возможностей для переезда, выбирая случайным образом w вакансий из всех клеток, которые свободны в данный момент.
Оценивается потенциальная удовлетворённость ua(v) каждого v ∈ V(a) для a, и выбирается одно из мест с наибольшей удовлетворённостью ua(vbest). Если в V(a) есть несколько лучших вакантных мест, одно из них выбирается случайным образом.
Осуществляется переезд на vbest, если либо:
ua(h) < 1 и ua(vbest) > ua(h), удовлетворённость vbest выше, чем удовлетворённость h
ua(h) = 1 и ua(vbest) = 1, удовлетворённость h достаточно высока, и переход в vbest не связан с количеством друзей по соседству.
В противном случае остаётся на h.
Для m > 0 приведённые выше правила модели влекут за собой жидкоподобную динамику. Заметим, однако, что только агентам, удовлетворённым своим местоположением, разрешается переезжать на место с той же удовлетворённостью; неудовлетворённые агенты могут переезжать только на места с более высокой потенциальной удовлетворённостью.
Важно подчеркнуть, каким образом агенты выбирают вакантные места. Агенты считают место h удовлетворительным, если доля друзей fa в пределах U(h) равна или выше их порога терпимости Fa. Все удовлетворительные места имеют одинаковую оценку 1, и агенты не делают различий между ними.
Методология исследования модели
Мы исследуем устойчивые модели на основе тора 50×50, предполагая, что 2% клеток пусты (d = 2%). Мы предполагаем, что частота спонтанных попыток переселения составляет 1% за итерацию (m = 0.01) и агент рассматривает не более 30 вакансий при попытке переселения (w = 30).
В пространстве дискретных клеток количество клеток в окрестности, исключая центральную, определяет ряд возможных порогов толерантности F. Для полностью заполненной окрестности Мура 3×3 из восьми клеток этот ряд будет F = 0/8, 1/8, ... 7/8, 8/8. Шеллинг использовал окрестность Мура 3×3. Однако девяти возможных значений F недостаточно для понимания динамики модели. Поэтому мы используем окрестность Мура 5×5, что приводит к серии из 25 значений F (0/24, 1/24, ..., 24/24), достаточной для полного представления явлений модели.
Далее мы исследуем паттерны модели в зависимости от:
Доли синих агентов – β
Порога толерантности FB синих агентов
Порога толерантности FG зелёных агентов.
Мы предполагаем, что синие агенты являются меньшинством, и исследуем паттерны модели для ряда β-значений: 0.05, 0.15, ..., 0.5. Как объяснялось выше, серии значений для FB и FG составляют 0/24, 1/24, ..., 24/24.
На рисунке ниже представлен трёхмерный "полукуб" пространства исследуемых параметров. Мы начинаем исследование паттернов моделей со значений параметров на поверхности куба, а затем объединяем результаты, чтобы описать паттерны для всех значений β, FB и FG.

Чтобы убедиться, что паттерны модели не зависят от начальных условий, все прогоны модели повторяются, начиная с двух стартовых: случайной и полностью сегрегированной.
 случайные, (b) полностью сегрегированные")
Характеристика паттернов модели
Использование индекса Морана для распознавания интегрированных и сегрегированных паттернов
Далее мы характеризуем глобальные свойства паттернов синих и зелёных агентов, используя индекс Морана I пространственной автокорреляции (Anselin 1995; Getis and Ord 1992; Zhang and Linb 2007), применяемый к бинарным данным (Lee 2001; Griffith 2010).
Индекс Морана I рассчитывается для пространственной переменной xh по занятым ячейкам в соответствии с формулой ниже. Переменная xh определяется следующим образом: xh = 0, если h занята синим агентом, и xh = 1, если h занята зелёным агентом.
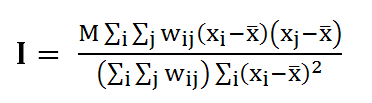
где xi, xj обозначают значения xh в клетках i, j;
M = Round((1-d)×N2) – общее количество занятых клеток;
x̄ - среднее значение xh по занятым клеткам;
wij = 1, если j ∈ U(i), в противном случае wij = 0.
Значение индекса Морана, близкое к 0, представляет случайный (интегрированный) паттерн, в то время как значение, близкое к 1, представляет полную сегрегацию (Zhang и Linb 2007). На основе проб перестановок для города 50×50, критическое значение I равно 0.002 при p = 0.01. В дальнейшем мы считаем модель города случайной, если I меньше 0.002. Мы проводим моделирование в течение 50 000 временных шагов, что достаточно для того, чтобы модель достигла устойчивого состояния, если таковое существует, или продемонстрировала колебания (см. ниже). Состояния паттернов рассчитываются для 10 000 шагов между итерациями 40 000 и 50 000.
Три возможные части смешанного паттерна
Индекс Морана, рассчитанный для всей территории города, полезен для определения полностью интегрированных (случайных) моделей, для которых I близок к нулю, сегрегированных моделей, для которых I близок к 1, и других (смешанных) моделей, для которых I выше 0, но ниже 1. Однако значение I не может различить два типа смешанных моделей, представленных на рисунках 4b и 4c; для обоих случаев значение индекса Морана будет промежуточным. Чтобы различить эти типы моделей, мы используем следующий алгоритм, который распознает две сегрегированные и "остаточные" части города, представленные на рисунках 4a-c (размеры всех кварталов 5×5):
Определим разделённые (синие и зелёные) части:
Пройдёмся по всем занятым клеткам и определим синие клетки, имеющие только синих соседей, и зелёные клетки, имеющие только зелёных соседей. Обозначим эти два набора клеток как B^ и G^ соответственно.Определим границу разделённых частей:
Пройдёмся по всем занятым клеткам, не принадлежащим B^ или G^, и определим клетки, окрестности которых имеют пересечение с B^ или G^. Обозначим это множество клеток как E1^.Определим границу остаточной части города и объединим её с границей сегрегированных частей:
Пройдёмся по всем занятым клеткам, которые не принадлежат B^, G^ или E1^, и определим те, окрестности которых имеют пересечение с E1^. Обозначим эти клетки как E2^ и объединим E1^ и E2^ в E^.Обозначим клетки, не принадлежащие B^, G^ или E^, как M^.
На рисунке ниже представлены шаги алгоритма для моделей на рисунках 4b и 4c. Как было сказано выше, модель города представляет собой тор.
, граничных (E^) и остаточных (M^) частей, применённый к образцу (b) и (c) на рисунке 4")
Ниже мы разделяем модели на рисунках 4b и 4c в зависимости от размера сегрегированных синих c(B^), сегрегированных зелёных c(G^) и остаточных c(M^) частей города. А именно, мы определяем С-индекс как:
C = min(c(B^), c(G^), c(M^))/N2
Реальные и абстрактные паттерны на рисунке 4 содержат либо две, либо все три возможные части, и относительная площадь каждой части высока. Таким образом, мы относим паттерн к типу 4c, если значение C составляет не менее 10% (C ≥ 10%). Высокий порог значения C в 10% гарантирует, что каждая из трёх частей может быть визуально распознана в паттерне, что характерно для реальных паттернов на рисунке 4.
Устойчивые и колеблющиеся модели
Наша настройка модели Шеллинга допускает спонтанное переселение, и, таким образом, модель никогда не замирает. Однако для большинства значений β, FB и FG модель переходит в устойчивое состояние, в котором ее сегрегационные характеристики существенно не меняются. Хоть это ясно из контекста, мы используем выражение "паттерн модели", когда говорим об "устойчивом паттерне модели".
Для некоторых комбинаций параметров паттерны не стабилизируются. Краевым примером является случай FG = 3/24, FB = 7/24, β = 0.5. Как видно из части (a) на рисунке ниже, индекс Морана для этого набора параметров колеблется между 0.35 и 0.70, как и C-индекс, который колеблется между 0 и 15%. На части (b) представлены два паттерна, созданных с этим набором параметров: один сегрегационный, качественно схожий с паттерном, представленным на рисунке 4a, а другой смешанный, качественно схожий с паттерном, представленным на рисунке 4c. Левая модель характеризуется относительно высоким значением I и низким значением C, а правая модель характеризуется относительно низким значением I и высоким значением C-индекса.
 Динамика индекса Морана и C-индекса для первых 200 000 итераций (b) Типичные наблюдаемые смешанные и сегрегационные паттерны.")
4. Результаты исследования модели
Далее мы кратко повторим результаты классической модели и перейдём к исследованию поведения модели в зависимости от всех трёх параметров β, FB и FG. После рассмотрим специальные подмножества пространства параметров (β, FB и FG). В конце рассмотрим общую ситуацию.
Базовый случай: равные группы с одинаковыми порогами толерантности (β = 0.5, FG = FB = F)
Чтобы проверить выводы Шеллинга относительно случая групп одинакового размера и порогов толерантности, мы выполнили 25 прогонов модели, для которых FG = FB = F = 0/24, 1/24, ..., 24/24, и, кроме того, девять прогонов с FG = FB = F = 0/8, 1/8, ..., 8/8, целью которых было исследовать влияние размера окрестности на паттерны модели.

 3×3 (b) 5×5 районов")
Качественно наши результаты полностью соответствуют выводам Шеллинга. А именно, интервал F-значений состоит из двух подмножеств: F ≤ 4/24 и F ≥ 5/24. При F ≤ 4/24 паттерны случайны (интегрированы), в то время как при F ≥ 5/24 паттерны сегрегированы. Переход между двумя подмножествами происходит резко. В случае окрестности 3×3 результаты качественно такие же, но менее точные: случайные паттерны характерны для F ≤ 1/8 = 3/24, а для F ≥ 2/8 = 6/24 паттерны сегрегированы.
Паттерны для размера 5×5 представлены на рисунке 13. Негладкая граница сегрегированного паттерна F = 5/24, похоже, соответствует концептуальному паттерну на рисунке 4a. Для сегрегированных паттернов (F ≥ 5/24), чем выше F, тем более гладкая граница между кластерами агентов одного цвета. Это объясняет медленный рост индекса Морана I с ростом F на рисунке 12.

Устойчивые паттерны для двумерных подмножеств параметров
Далее мы исследуем устойчивые паттерны модели для случая зелёного большинства против синего меньшинства и значений параметров, ограниченных тремя двумерными подпространствами трехмерного полукуба (рис. 14):
β ∈ (0, 0.5], FG = FB: равная толерантность обеих групп (а)
β ∈ (0, 0.5], FG = 0, FB ∈ [0, 1]: абсолютно толерантное "зелёное" большинство (b)
β ∈ (0, 0.5], FG ∈ [0, 1], FB = 0: абсолютно толерантное "синее" меньшинство (c)
![рис.14 Три исследованных 2D-подмножества параметров: (a) β ∈ (0, 0.5], FB = FG (b) β ∈ (0, 0.5], FG = 0, FB ∈ [0, 1] (c) β ∈ (0, 0.5], FG ∈ [0, 1], FB = 0](https://habrastorage.org/r/w1560/getpro/habr/upload_files/162/a7b/970/162a7b970cacc49b66399b220f4b9b4a.png "рис.14 Три исследованных 2D-подмножества параметров: (a) β ∈ (0, 0.5], FB = FG (b) β ∈ (0, 0.5], FG = 0, FB ∈ [0, 1] (c) β ∈ (0, 0.5], FG ∈ [0, 1], FB = 0")
Мы обозначаем для данного β, Frnd,β как наибольшее значение F, которое порождает случайный (интегрированный) устойчивый паттерн (характеризующийся близким к нулю значением индекса Морана), а Fsgr,β как наименьшее значение F, которое приводит к сегрегированному паттерну (характеризующийся близким к единице значением I). Как показано выше, для β = 0.5 значения Frnd,0.5 и Fsgr,0.5 смежны, т.е. Frnd,0.5 = 4/24, а Fsgr,0.5 = 5/24.
Синее меньшинство против зелёного большинства, одинаковый порог толерантности в обеих группах (β ∈ (0, 0.5], FB = FG = F)
Как было представлено в §2.14, случай неравных групп демонстрирует смешанные модели. Для иллюстрации рассмотрим случай β = 0.2. Значения индекса Морана для стойкого паттерна в зависимости от F = FB = FG и паттерны для отдельных значений F представлены на рисунке 15.
Как видно на рисунке 15а, зависимость паттерна модели от F в случае β = 0.2 иная, чем в случае β = 0.5. А именно, для F = 2/24, 3/24 и 4/24 значения I ненулевые, но всё же ниже, чем для сегрегированных паттернов. Как видно из рисунка 15b, паттерны для этих трёх значений F не являются ни случайными, ни сегрегированными. Согласно рисунку 15, Frnd,0.2 = 1/24, а Fsgr,0.2 = 5/24 (обратите внимание, что значения Fsgr,0.2 и Fsgr,0.5 одинаковы и равны 5/24). При значениях F ∈ (Frnd,0.2, Fsgr,0.2) часть территории города занята исключительно зелёным большинством, в то время как остальная часть территории интегрирована. С ростом F интегрированная часть интегрированного региона становится более компактной, что влечёт за собой рост индекса Морана. При увеличении F с 4/24 до 5/24 происходит резкая сегрегация города. Для F ≥ 5/24 значение I медленно увеличивается с ростом F, а граница между зелёным и синим кластерами становится более плавной, как и при β = 0.5.
 Индекс Морана и (b) устойчивые паттерны в зависимости от F, для β = 0.2")
Полный вид зависимости индекса Морана от F и β представлен на рисунке 16a. Обратите внимание, что (a) при β > 0.05 паттерн резко сегрегирует, когда F проходит пороговое значение Fsgr,β = 5/25, тогда как при β = 0.05, Fsgr,0.5 = 6/25; (b) значение Frnd,β линейно уменьшается, а ширина интервала значений F, генерирующих смешанные паттерны, увеличивается с уменьшением β. Зависимость C-индекса от F и β представлена на рисунке 16b. Она показывает, что для всех F ≠ 5/24 паттерны состоят только из двух частей, либо из сегрегированных синих и зелёных, либо из сегрегированных зелёных и смешанных частей. Для F = 5/25 максимальные значения C положительны, но намного ниже 10% уровня, который мы приняли как характерный для сложного паттерна на рисунке 4c. Ненулевой C-индекс, полученный для F = 5/24, характеризует существенную негладкость границы между сегрегированными синей и зелёной областями. Вид паттерна в зависимости от β, FB, FG показан на рисунке 16c. В теоретическом исследовании (Benenson и Hatna 2009) мы показали, что для F ∈ (Frnd,β, Fsgr,β), в случае смешанного паттерна, распределение зелёных и синих агентов внутри интегрированной части является случайным. Важно отметить, что доля меньшинства внутри этих участков всегда больше β, растет с ростом β и достигает 0.5, когда F приближается к Fsgr,β. Последнее объясняет резкий переход от смешанного к сегрегационному паттерну, когда F переходит пороговое значение Fsgr,β.
 индекса Морана и (b) C-индекса от F для β = 0.05, 0.15, ..., 0.5 и FB = FG = F (c) наборов параметров, характерных для случайных, смешанных и сегрегированных паттернов в полукубе")
Абсолютно толерантная группа (β ∈ (0, 0.5], FG = 0 или FB =0)
В этом разделе мы рассмотрим случай, когда агенты одной группы полностью толерантны. Мы начнём с описания случая равных по размеру групп (β = 0.5) и полностью толерантных зелёных агентов (FG = 0), а затем опишем случай, когда толерантная группа является либо большинством, либо меньшинством.
Случай равных групп (β = 0.5) и полностью толерантных агентов одной из групп кратко упоминается в работе Portugali и др. (1997), которые отметили, что, несмотря на абсолютную нейтральность членов одной из групп, при достаточно высоком пороге толерантности другой группы происходит сегрегация. Наше моделирование существенно расширяет этот результат. Как и выше, для данного β мы обозначаем как FB,rnd,β наибольшее значение FB, которое влечёт за собой случайный паттерн, и как FB,sgr,β наименьшее значение FB, которое влечет за собой сегрегированный паттерн.
На рисунке 17 представлена зависимость индекса Морана от FB для случая β = 0.5 и FG = 0 и закономерности для выбранных значений F. Согласно рисунку 17а начиная с FB,rnd,0.5 = 4/24, значение I линейно увеличивается при дальнейшем увеличении FB, пока FB не достигнет FB,sgr,0.5 = 13/24. В отличие от случая FG = FB, нет резкого изменения в уровне сегрегации, когда FB приближается к FB,sgr,0.5. Для FB ∈ [5/24, 12/24] картина неоднозначна.
Соответствующие устойчивые паттерны показаны на рисунке 17b. Часть территории смешанных паттернов занята исключительно полностью толерантными зелёными агентами, в то время как в интегрированной части паттернов проживает мало зелёных агентов. Синие агенты избегают районов, где их доля ниже FB, и, таким образом, доля полностью толерантных зелёных, проживающих в районах с преобладанием синих, уменьшается с увеличением FB. Для FB = 10/24, 11/24 и 12/23 модели слегка колеблются во времени из-за небольшого количества зелёных агентов, проживающих в районе с преобладанием синих. Однако C-индекс всегда остаётся ниже 3%.
 зависимость I от FB; (b) устойчивые паттерны для выбранных значений FB")
Зависимости I и C от β и FB для случая абсолютно толерантного большинства или меньшинства представлены на рисунке 18. Для толерантного большинства (рис. 18c) уменьшение β влечет за собой уменьшение FB,rnd,β и FB,sgr,β, но с разной скоростью и с увеличением длины интервала (FB,rnd,β, FB,sgr,β). Зависимость I от FG и β для случая абсолютно толерантного синего меньшинства представлена на рисунке 18а. В этом случае уменьшение β приводит к росту как FG,rnd,β, так и FG,sgr,β и уменьшению интервала смешанных паттернов до нуля при уменьшении β до 0.15. Три области параметров для обоих случаев представлены на рисунке 18e. C-индекс (рис. 18b, 18d) ненулевой для значений F чуть ниже порога, гарантирующего полную сегрегацию, а именно FB, FG = 10/24 11/24 и 12/23. Паттерны модели для этих значений F слегка колеблются во времени.
 абсолютно толерантное синее меньшинство (FB = 0); (c, d) абсолютно толерантное зелёное большинство (FG = 0); (e) параметры, характерные для случайных, смешанных и сегрегированных паттернов")
Устойчивые паттерны для случая абсолютно толерантного зелёного большинства и β = 0.3 представлены на рисунке 19a (FB,rnd,0.2 = 3/24, FB,sgr,0.2 = 13/24). Как и для β = 0.5, с ростом FB в пределах (FB,rnd,0.2, FB,sgr,0.2), доля абсолютно толерантных зелёных агентов, проживающих в областях с преобладанием синих, уменьшается с ростом F, пока при FB = 13/24 не будет достигнута полная сегрегация. На рисунке 19b представлена серия устойчивых закономерностей для случая абсолютно толерантного синего меньшинства β = 0.3. Как и в случае абсолютно толерантного большинства, доля меньшинства в области, где доминирует большинство, уменьшается с увеличением FG, и параллельно увеличивается размер участков меньшинства.
 полностью толерантное зелёное большинство (FG = 0); (b) полностью толерантное синее меньшинство (FB = 0)")
В целом, устойчивые паттерны в случае абсолютно толерантного меньшинства не отличаются от закономерностей, полученных для случая абсолютно толерантного большинства. Интервал F-значений, для которых возникают эти закономерности, становится более узким и смещается в сторону больших значений F с уменьшением β.
Общий случай
Чтобы завершить описание устойчивых паттернов моделей, рассмотрим их зависимость от всех трёх параметров: β, FB и FG. Мы сделаем это для четырёх горизонтальных сечений полукуба при β = 0.05, 0.2, 0.35 и 0.5. Четыре вида индекса Морана и C-индекса для FG ≤ 17/24 и FB ≤ 17/24 и соответствующая 3D иллюстрация полных (FB, FG, β) участков, создающих случайные, смешанные и сегрегированные паттерны, представлены на рисунке 20.
 Индекс Морана и (b) C-индекс в зависимости от (FG, FB) для FG ≤ 17/24, FB ≤ 17/24 (при больших FG или FB паттерны всегда сегрегированы) и β = 0.05, 0.2, 0.35 и 0.5 (отмечены случаи FB = FG); (c) 3D-представление областей (FB, FG, β), создающих случайные, смешанные и сегрегированные паттерны.")
С увеличением β увеличивается область значений (FB, FG), создающих смешанные паттерны в левой верхней части. Эта область представляет случай толерантной группы меньшинства, которая становится более многочисленной с увеличением β и, таким образом, вносит больший вклад в возникновение смешанных паттернов. Соответственно, с увеличением β область значений (FB, FG), порождающих смешанные паттерны в правой части, уменьшается, так как количество агентов толерантного большинства уменьшается. Область (FB, FG) становится симметричной для FB = FG, когда β достигает 0.5. Область значений (FB, FG), создающих интегрированные паттерны, наибольшая для β = 0.5 и сокращается с уменьшением β; область смешанного паттерна растёт за счёт него.
Все устойчивые паттерны, полученные в области (β, FB, FG), характеризуются нулевым или очень низким значением C-индекса (рис. 20b). Ненулевые значения C получены для значений параметров, лежащих на границе области, гарантирующей сегрегацию, а именно, для значений FB и FG, удовлетворяющих условию FB + FG = 10/24, 11/24, 12/24. Для этих значений FB и FG паттерны колеблются во времени, причем амплитуда колебаний I и C-индекса не зависит от β. Для нескольких пар (FB, FG) на этой границе амплитуда колебаний достигает уровня FG = 3/24, FB = 7/24, β = 0.5 (рис. 10). Мы откладываем исследование этого явления на будущее.
5. Обсуждение
Наша версия модели Шеллинга основана на двух качественных предположениях: во-первых, агенты являются довольствующимися, т.е. они не делают различий между местами, где количество друзей выше их порога терпимости; во-вторых, правила перемещения позволяют удовлетворённым агентам мигрировать между вакантными местами с одинаковой удовлетворённостью. Принцип удовлетворения потребностей соответствует оригинальной формулировке Шеллинга, а правила перемещения влекут за собой жидкоподобную динамику, которая не позволяет моделям застопориться в состоянии, когда некоторые агенты недовольны, потому что нет удовлетворительных вакантных мест.
Мы показали, что агенты, которые могут перемещаться между районами с одинаковой удовлетворённостью, остаются случайно распределёнными в пространстве, если их требования к наличию друзей в пределах района низкие; сегрегированными, если их требования высокие; и смешанными, если их требования к друзьям в пределах района промежуточные. В последнем случае структура популяции зависит от исследуемых параметров: доли меньшинства β и уровня толерантности FB и FG агентов каждой группы.
Можем ли мы соотнести эти результаты с реальной картиной, наблюдаемой в Рамле и Яффе (рис. 2-4)? В принципе, да: арабские домовладельцы являются меньшинством в Яффе и Рамле, а эмпирические данные свидетельствуют о том, что представители арабских меньшинств, живущие в смешанных городах Израиля, в некоторой степени безразличны к присутствию еврейских соседей в их доме или в соседних домах (Benenson и др. 2002). Мы также можем предположить, что израильские арабы и евреи являются довольствующимися в отношении этнической структуры своих жилых кварталов и, вероятно, используют дополнительные критерии, помимо этнической принадлежности соседей, при поиске жилья. Наше исследование показывает, что если эти тенденции характерны для всех групп населения, то динамика расселения влечёт за собой смешанные модели, которые действительно наблюдаются в некоторых районах Яффы и Рамлы.
Модель создала устойчивые паттерны, которые соответствуют двум из трёх случаев, представленных на рисунке 4: сегрегированные, как на рисунке 4a, и смешанные, как на рисунке 4b. Однако модели в Яффе и Рамле более сложны, чем те, которые были получены в модельных сценариях, исследованных в данной работе: они обе содержат смешанные части бок о бок с сегрегированными, как схематично представлено на рисунке 4c. Как мы показали выше, модель Шеллинга даже в расширенном, трёхмерном пространстве параметров не даёт таких устойчивых паттернов. Говоря формально, в рамках модели, которую мы исследовали в данной работе, независимо от доли меньшинства или порогов толерантности двух групп, сегрегированные и смешанные районы не могут постоянно сосуществовать.
Паттерны, в которых сосуществуют сегрегированные и смешанные районы, периодически возникают и исчезают для значений F, которые лежат на границе между областями параметров, которые влекут за собой устойчиво сегрегированные и устойчиво смешанные модели. Эти колеблющиеся паттерны должны быть исследованы далее, чтобы оценить их устойчивость к вариациям правил модели, особенно если мы далее расширим модель и предположим, что уровень толерантности среди зелёных и синих агентов может варьироваться.
Предварительное исследование показывает, что в этом случае действительно могут быть получены более сложные паттерны, чем те, которые были получены в данной работе, и эти паттерны содержат одну интегрированную и две сегрегированные области для диапазона параметров, который шире, чем тот, который был выявлен в данной работе. Мы считаем, что такое обобщение приближает модель к реальности. Действительно, предположение о том, что члены одной этнической группы идентичны в своём отношении к членам другой этнической группы, кажется искусственным, независимо от того, какие группы обсуждаются. Однако единственным результатом в этом отношении, касающимся арабов и евреев, является продолжающееся эмпирическое исследование (Omer и др. 2012), которое демонстрирует, что евреи и арабы в Яффе существенно различаются в своей толерантности к членам другой группы.
Нашли опечатку или неточность в переводе? Выделите и нажмите
CTRL/⌘+Enter

