Рассказ об уровне взаимодействия с хост-контроллерами растянулся на
две статьи и всё равно оставил за кадром некоторые детали — которые, как я надеюсь, заинтересованный читатель может восполнить непосредственно из
исходников. Уровень поддержки каналов куда проще и в основном занят тем, что преобразует вызовы API для вышележащих уровней в нужную последовательность действий, включая блокировки, с нужным хост-контроллером.
Открытие канала
Функция
USBOpenPipe из API, названная
usb_open_pipe в коде
pipe.inc, открывает новый канал по указанным характеристикам канала и «родительскому» каналу, где записаны характеристики устройства. Для этого она:
- выделяет пару структур
*hci_pipe+usb_pipe, описывающих канал и выравненных на контроллеро-специфичную границу, вызовом контроллеро-специфичной функции usb_hardware_func.AllocPipe;
- выделяет пару структур
*hci_gtd+usb_gtd, описывающих пустой дескриптор передачи и выравненных на контроллеро-специфичную границу, вызовом контроллеро-специфичной функции usb_hardware_func.AllocTD;
- заполняет указатели: в структуре канала копирует указатель на структуру контроллера и указатель на данные устройства, общие для всех каналов, из «родительского» канала; между структурой канала и структурой пустого дескриптора заполняет указатели туда-обратно; структуру пустого дескриптора делает единственным элементом двусвязного списка каналов;
- инициализирует мьютекс, который будет охранять все операции с этим каналом. Хотя вся обработка событий от USB-контроллеров происходит в потоке USB, про обращения к API нельзя сказать того же: чтение приложением файла с USB-флешки инициирует постановку передачи — и даже не одной — в очередь в контексте потока приложения. Чтобы новая передача не мешала USB-потоку обрабатывать завершение старой передачи, и нужен этот мьютекс;
- захватывает мьютекс набора каналов устройства и убеждается, что устройство ещё не отключено;
- вызывает контроллеро-специфичную инициализацию
usb_hardware_func.InitPipe, охраняемую мьютексом, глобальным для контроллера;
- добавляет новый канал в набор каналов устройства и отпускает мьютекс набора каналов;
- при ошибке на одном из этапов откатывает все предыдущие этапы. Поскольку откатить контроллеро-специфичную инициализацию сложнее всего, она сделана на последнем этапе, после которого ошибок быть не может.
Контроллеро-специфичная инициализация последним действием добавляет новый канал в соответствующий список. Для управляющих каналов, равно как и для каналов массивов данных, есть всего один список, а вот для каналов прерываний нужно ещё выбрать один из нескольких вариантов.
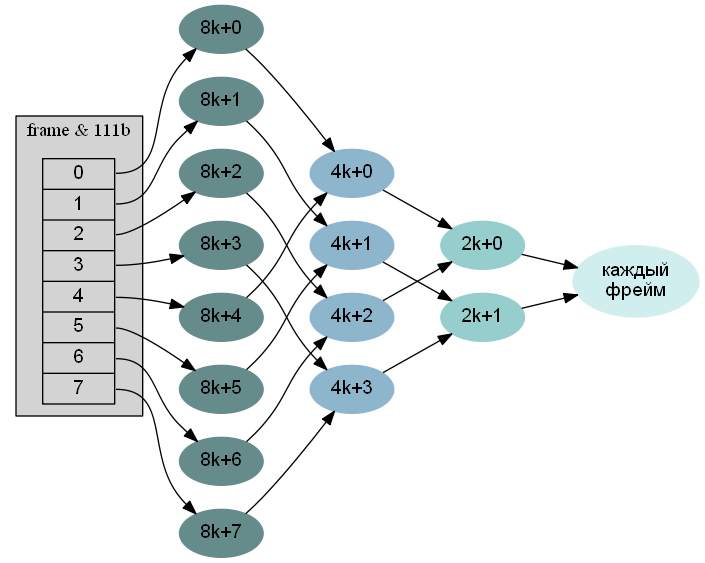
Здесь в игру вступает планировщик
scheduler.inc. Он как раз и выбирает один из списков каналов прерываний, а также убеждается, что для нового канала «достаточно места». Я напомню, что в каждом фрейме FullSpeed-шины под периодические передачи нельзя использовать более 90% времени, а в каждом микрофрейме HighSpeed-шины — более 80% времени.
Здесь я должна отметить, что если вы зачем-то пишете реализацию USB, которая должна
работать в ваших условиях, на планировщике можно серьёзно сэкономить. Вам придётся в том или ином виде реализовать всё остальное, что описано в этой серии статей, но при отсутствии большой нагрузки можно вместо полного дерева обойтись всего одним списком каналов прерываний, обрабатываемым каждый фрейм/микрофрейм. Чуть более экономная схема, не слишком усложняющая реализацию, — один список каналов для каждого интервала обработки 1, 2, 4, 8, 16, 32 фреймов. Пока не нужно одновременно обрабатывать более одного устройства с большим трафиком на один хост-контроллер, такой подход ничем не уступает полноценному планировщику. Простая схема «сломается» в некоторых специфичных конфигурациях с двумя или более изохронными каналами FullSpeed-устройств или тремя или более изохронными каналами HighSpeed-устройств, но, быть может, никто и не будет запускать вашу реализацию в столь специфичных условиях?
Если же вы пишете реализацию USB, которая должна работать
везде и всегда, планировщик вам тоже придётся написать.
 Пожалуй, самый частый вопрос, который разработчики KolibriOS слышат в свой адрес: "Когда вы собираетесь портировать Колибри на ARM?" Мы всегда отвечаем, что это невозможно, KolibriOS написана на ассемблере FASM с использованием инструкций x86, и портирование её на ARM будет означать практически полное переписывание с нуля. Но главная причина в том, что на рынке есть достаточно компьютеров на x86-совместимых процессорах, размером как Raspberry Pi и стоимостью всего на $5-$35 дороже, а это делает портирование не только невозможным, но также и бесполезным занятием. Чтобы читатели не говорили, что x86-совместимый компьютер за $40 — это «сферический конь в вакууме», я решил написать обзорный цикл из 3 статей о нескольких таких компьютерах. Сразу оговорюсь, что статьи не спонсируются — всё это железо я покупал на свои деньги, и на части него я практически каждую неделю тестирую Колибри — не стала ли она, случаем, слишком медленной? Кому интересно — прошу под кат.
Пожалуй, самый частый вопрос, который разработчики KolibriOS слышат в свой адрес: "Когда вы собираетесь портировать Колибри на ARM?" Мы всегда отвечаем, что это невозможно, KolibriOS написана на ассемблере FASM с использованием инструкций x86, и портирование её на ARM будет означать практически полное переписывание с нуля. Но главная причина в том, что на рынке есть достаточно компьютеров на x86-совместимых процессорах, размером как Raspberry Pi и стоимостью всего на $5-$35 дороже, а это делает портирование не только невозможным, но также и бесполезным занятием. Чтобы читатели не говорили, что x86-совместимый компьютер за $40 — это «сферический конь в вакууме», я решил написать обзорный цикл из 3 статей о нескольких таких компьютерах. Сразу оговорюсь, что статьи не спонсируются — всё это железо я покупал на свои деньги, и на части него я практически каждую неделю тестирую Колибри — не стала ли она, случаем, слишком медленной? Кому интересно — прошу под кат.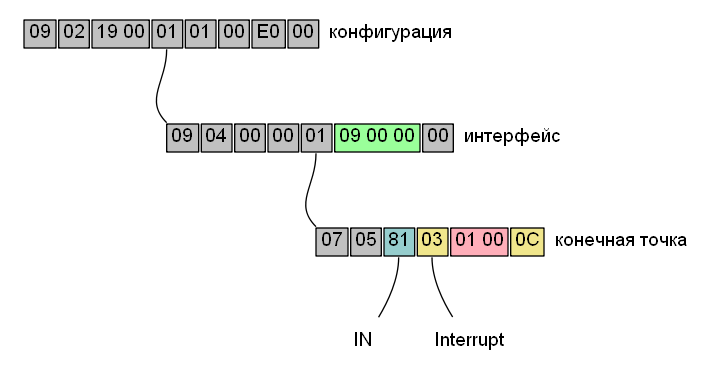
 Сегодня, 21 октября 2013 г., формально окончился KSoC (
Сегодня, 21 октября 2013 г., формально окончился KSoC ( Сегодня,
Сегодня,  Несколько дней назад, на
Несколько дней назад, на  То, что в KolibriOS есть не русскоговорящие разработчики (хоть их и очень мало), некоторым из вас уже известно по моему
То, что в KolibriOS есть не русскоговорящие разработчики (хоть их и очень мало), некоторым из вас уже известно по моему 
 Для тех, кто интересуется проектом
Для тех, кто интересуется проектом 