В данной статье будут рассмотрены подходы и библиотеки, предоставляемые ROS для решения задач автономной и не очень навигации.
Также будут рассмотрены несколько специфичных для антропоморфных роботов пакетов. Любой робот (наверняка даже машинка со средне-мощным бортовым ПК под управлением Linux и парой веб камер) наверняка найдет здесь что — нибудь для себя.
Если же аппаратура слишком слаба для подобных вычислений, можно воспользоваться распределенностью ROS, которая позволяет нодам на разных машинах взаимодействовать между собой. Подобный вариант описан здесь.
Тезарус
Карта препятствий (Occupancy Map, Grid)

Двухмерная дискретная карта, в которой каждая ячейка может быть в одном из трех состояний:

Облако точек (PointCloud)
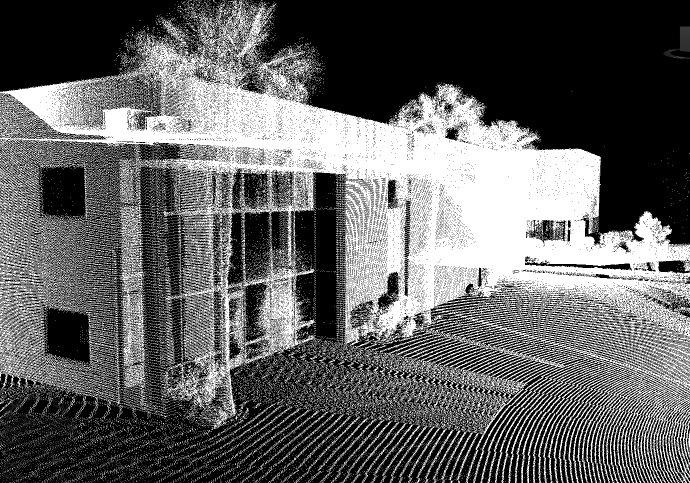
В ROS облака точек существуют в основном в виде sensor_msgs/PointCloud2.
Плотное облако точек

Аналог Occupancy Grid, но в 3D.
В данной статье по умолчанию будет подразумеваться реализация из библиотеки Octomap.
Хороший разбор данной библиотеки в этой презентации.
Концепция нод / топиков / подписчиков
Если кратко, то вы можете запустить свою программу в контексте ROS, где она будет нодой (Node).
Также существуют топики (Topics). Это своего рода именованные ящики, в которые ноды могут складывать и из которых забирать сообщения различных типов (например объекты типов geometry_msgs::Pose, sensor_msgs::PointCloud2, nav_msgs::Path и многих других).
Любая из нод может публиковать в любые топики, а также считывать из любых топиков сообщения.
Ноды работают асинхронно друг от друга.
Если не совсем кратко, то
ROS
Robot operating system — очень удобная платформа для реализации роботехнических проектов.

- Удачная концепция пакетов (можно использовать функционал библиотек, просто запустив соответствующую ноду)
- Предоставляет много нужных пакетов для робототехники
В частности хорошо развиты стеки:
- Навигации
- Локализации
- Картографии (SLAM алгоритмы)
- Предоставляет визуализаторы, удобную концепцию сообщений и подписчиков и много другого.
SLAM (с англ. одновременная локализация и картография)
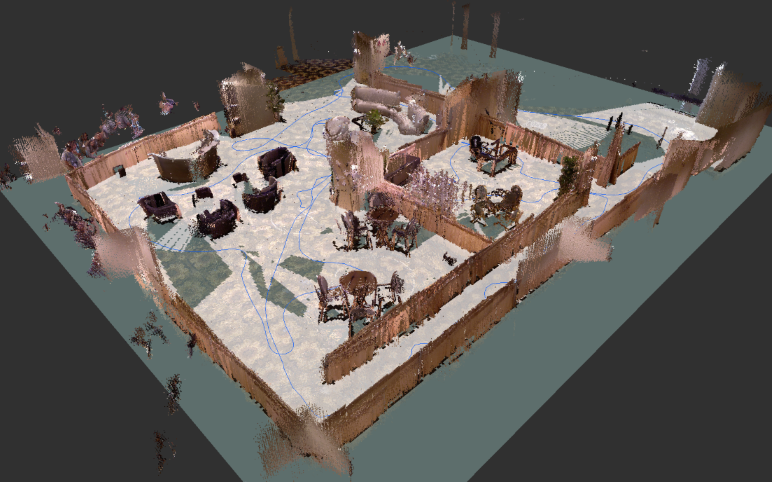
Для автономной навигации, да и вообще чего — либо, требующего полной информации об окружении нужна карта самого окружения.
Для этих задач хорошо подходит карта в виде облака точек, из которой в дальнейшем можно получить другие варианты карт (плотное облако точек, OccupancyGrid).
Vision-based SLAM алгоритмы позволяют строить карту окружения и приблизительно оценивать местоположение в ней.
На входе
Данные с датчиков, помогающих оценить местоположение.
Например:
- ИНС
- Данные с моторов
- и т.д.
Данные с Vision датчиков
RGB-D Camera

- Представители: Kinect, Real Sence, Asus Xtion
- Предоставляет RGB снимок и карту глубины
- Хорошо поддерживаются мними библиотеками
- Дает приемлемую точность (зависит от расстояния. От 1 мм до 5 см)
- Дальность 4 метра
- Слепая зона 0.5 метра
- sensor_msgs/PointCloud2
Stereo Camera
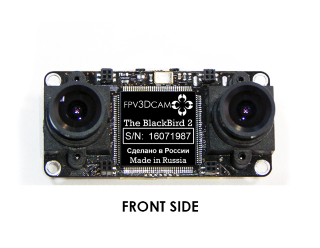
- Высокая дальность
- Практически нет слепой зоны
- Точность ниже, чем у RGB-D камер
- Пара веб камер — не являются хорошей стереокамерой (но чем черт не шутит)
Lidar

- Очень высокая дальность
- Не менее высокая стоимость
- sensor_msgs/LaserScan
На выходе
- Карта окружения
- Аппроксимация местоположения
SLAM пакеты в ROS
Примечание: в ROS можно получать облака точек со стереокамер или RGB-D камер. В свою очередь облака точек можно преобразовывать в LaserScan, который является ходовым форматом ROS сообщений для лидаров и принимается некоторыми из описанных ниже пакетов.
Это значит, что имея на руках стереокамеру, вы скорее всего сможете использовать SLAM алгоритмы, принимающие данные от Лидаров или RGB-D камер. Аналогично для RGB-D камер, вы сможете использовать их в качестве Лидаров.
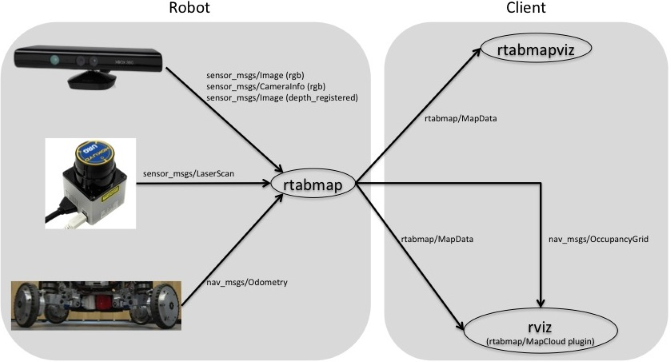
rtabmap_ros
ROS пакет, предоставляющий обвертку над бибилотекой rtabmap. Наверное, самый популярный, удобный в использовании и многосторонний пакет.
- Качественная документация
- Поддерживает многие датчики в качестве источников данных (ряд RGB-D камер, стерео камеры, лидары)
- В меру требовательна к ресурсам даже при создании больших карт (хватает ноутбука с Intel Core i3 + 4 Гб RAM)
- Имеет множество интересных настроек, влияющих на скорость работы / качество
- Предоставляет много дополнительных функций.
Например:
- строит карту препятствий путем проецирования групп точек, начиная с некой высоты
- имеет интеграцию с move_base (см ниже)
- имеет ноду сегментации облака точек на 2 других облака (препятствия и земля)
- Интеграция с библиотекой Octomap (спец. структуры для создания, хранения и обработки плотных облаков точек)
hector_slam
SLAM алгоритм, строящий 2D карту препятствий.
По умолчанию использует данные от лидара, но
с тем же успехом ему на вход можно подавать данные со стереокамеры, RGB-D камеры (см примечание вначале главы).
Близкий родственний: slam_gmapping.
Наверняка это самые легковесные реализации SLAM алгоритмов.
ElasticFusion
- строит мешь
- высокие требования к ресурсам (GPU)
- Не имеет пакета в ROS
Эта библиотека хорошо рассмотрена в этой статье.
Подходы к решению задачи автономной (и не очень) навигации
В этом разделе будут разобраны основные подходы для решения вышеупомянутой задачи, которые предоставляет ROS. В официальном туториале представлена лишь малая часть из них. Для ряда роботов имеются готовые решения (разделы 6.2 — 6.6 по ссылке выше). Также советую посмотреть эту ссылку. Возможно имеет смысл немного переписать их код, если ваш робот похож на одного из представленного там списка.
Также есть ряд пакетов, не упомянутых в источниках выше. Особенно решения для коптеров.
Планирование по Карте Препятствий (OccupancyMap)

Этот подход позволяет решать задачу навигации на плоскости, что довольно просто в алгоритмическом смысле.
Карту препятствий (см в тезарусе статьи) можно получить из облака точек несколькими способами:
- На основе среза на определенной высоте из облака точек
- Как проекцию всех точек на плоскость z = 0 начиная с какой — нибудь заданной высоты z =?..
Такой вариант предоставляет rtabmap.
У него имеется много параметров, как то:
- допустимый угол наклона "плоскости"
- количество точек вблизи, которые стоит считать за препятствие
- многое другое
- Некоторые реализации SLAM алгоритмов изначально строят лишь карту препятствий (см. выше)
ROS концепция move_base

Хорошо пододит для колесных роботов. Это концепция ROS, которая состоит из 2 планеров.
Global Planner
Ищет по Карте Препятствий глобальный маршрут в виде линии.
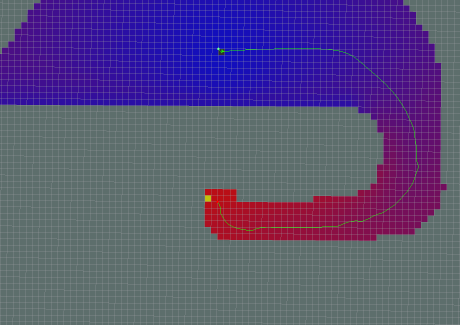
Local Planner
На локальный планер ложится рассчет скоростей и углов, так чтобы избежать столкновений.

Далее скорость и углы подаются на ноду, управляющую роботом. Хорошо подойдет для колесных платформ.
footstep_planners
Данный подход рассчитан в основном на антропоморфных роботов. Один из сценариев использования карты препятствий в контексте навигации и движения антропоморфного робота это построение безопасной траектории шагов для робота, по которой он впоследствии сможет пройти.
Затем траектория в виде набора ступней поступет на исполнение роботу.
Применение такого варианта возможно, если контроллер робота может "выполнять" задания вида "наступить в точку с заданными координатами".
На мой взгляд, при планировании должны быть учтены условия равновесия робота, хоть планирование и осуществляется из набора "безопасных шагов". Или при реализации шага контроллер робота должен оценивать возможность реализовать его, не упав при этом.
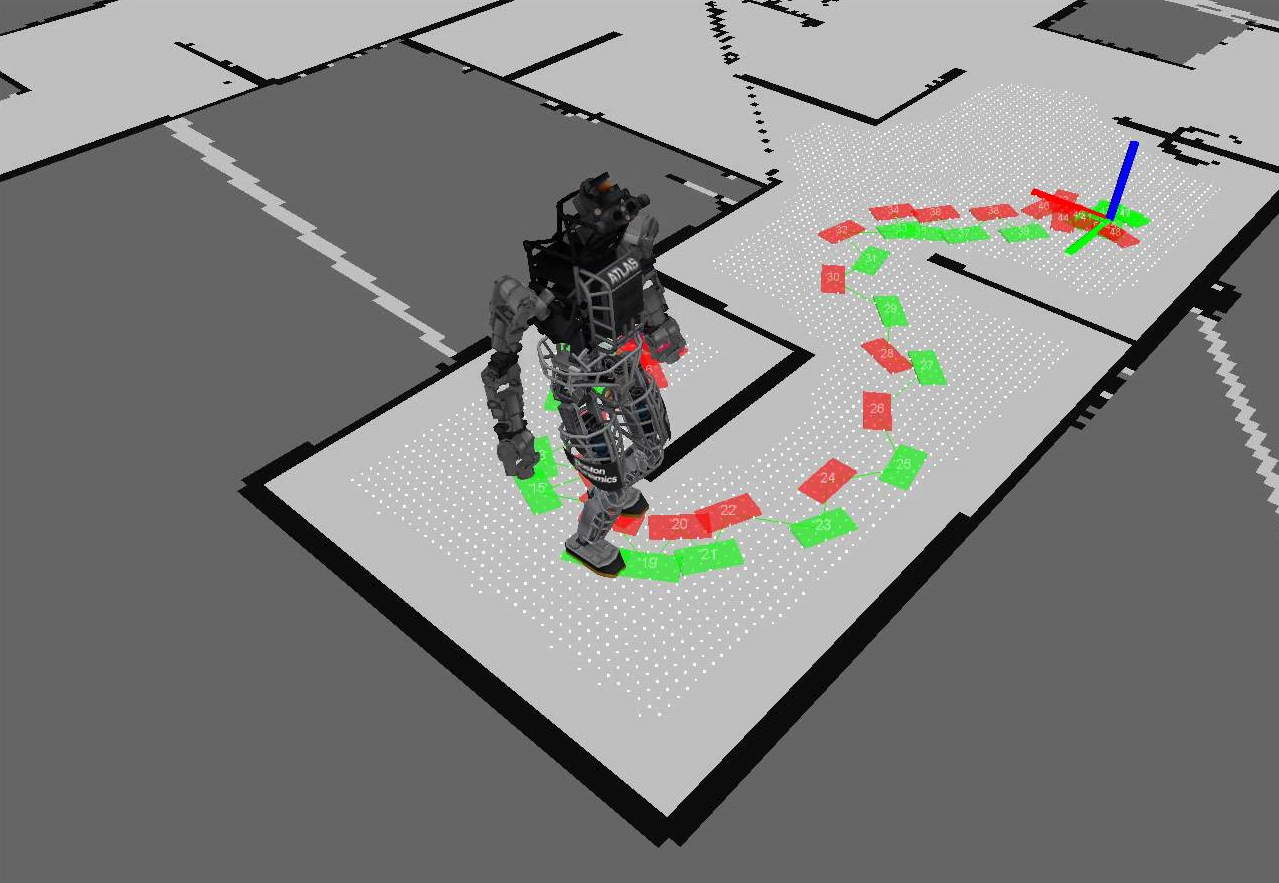
footstep_planner & humanoid_navigation

footstep_planner — часть решения humanoid_navigation по навигации антропоморфного робота в известном окружении.
footstep_planner предоставляет возможность планировать маршрут в виде набора положений ступней, ведущей из стартовой в конечную позицию.
Планирование осуществляется на 2D карте препятствий.
Следует заметить, что данный пакет предоставляет много нужных настроек, что позволяет применять его практически на любых антропоморфных роботах.
Начиная с физических параметров ступней и их положений друг относительно друга при шаге,
заканчивая выбором алгоритма поиска, используемого при планировании.
Навигация в плотных (и не очень) облаках точек
Vigir_footstep_planner
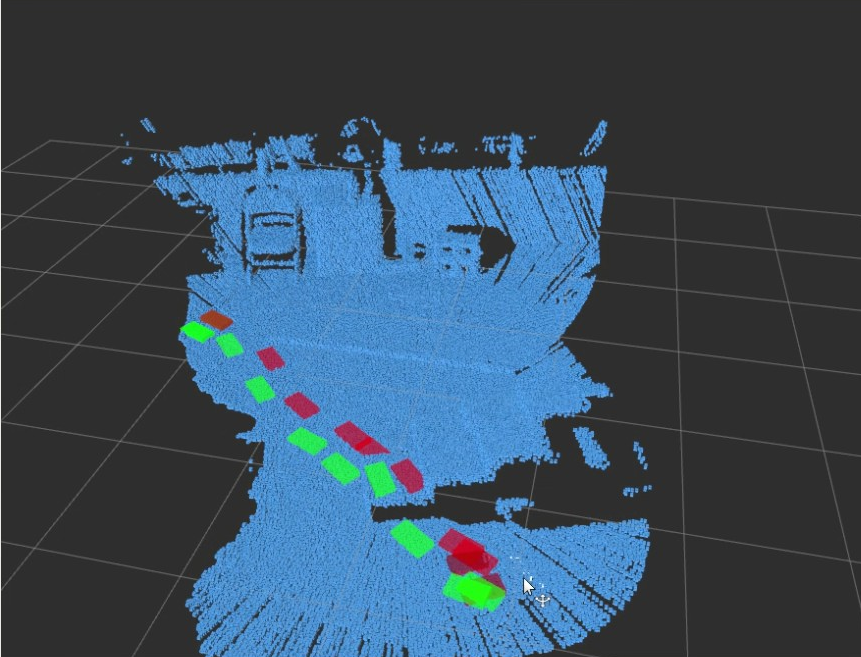
Это идейный продолжатель footstep_planner'a в 3D пространстве. При помощи него можно прокладывать маршрут прямо в плотных облаках точек. В комплекте — плагин к Rviz, позволяющий редактировать полученный маршрут.
Подробности в публикации
3D navigation

Расширение move_base, описанного выше до 3D с проверкой коллизий. Используется моделька робота и плотная 3D карта окружения.
Интересная публикация по этому пакету
Move It
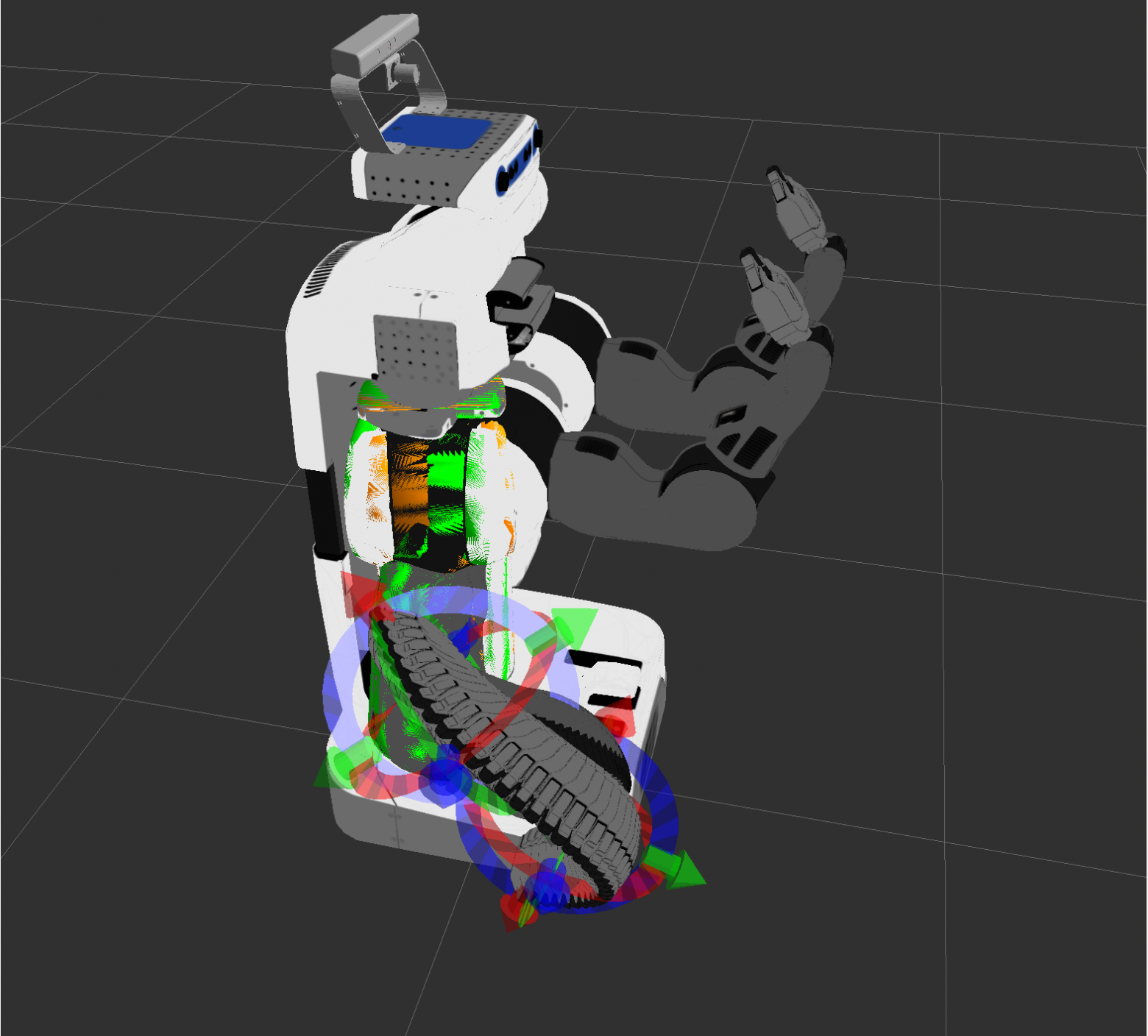
Пакет планирования сложных движений для роботов любой конструкции. Робот представляется в виде модели с учетом всех подвижных частей и ограничений на их передвижения. Далее можно рассчитать траекторию всех конечностей робота при его переходе из одного состояния в другое. Возможен учет коллизий с окружением в виде плотных облаков точек (by Octomap).
В доументации к MoveIt можно найти ряд моделек, которые можно экспортировать и поиграться с ними. Среди туториалов хорош этот, показывающий работу с библиотекой из C++ кода.
Интересные ссылки
Качественный разбор SLAM алгоритмов (англ.)
- Книга Probabilistic Robotics
- Курс по SLAM алгоритмам и навигации
На протяжении курса досконально разбирается мат. база SLAM алгоритмов.
В качестве практических заданий — реализация с 0 на Python с визуализацией.

