Comments 59
Еще в конце марта он расстрелял ее лазером спектрометра ChemCam, точки на стенке скважины — от него.Удивительно (хотя, возможно, наоборот — не удивительно), насколько точно он стреляет лазером — точки расположены ровненько одна над другой. А каков масштаб у этой картинки?
Уже несколько дней подряд он проделывает за день по несколько десятков метров, и всего километр отделяет его от абсолютного рекорда пробега по космическим телам за пределами Земли. Луноходу-2, сорок лет удерживающему рубеж в 37 км, скоро придется уступить первое место.Позволю себе вставить инфографику, недавно опубликованную NASA:
Скрытый текст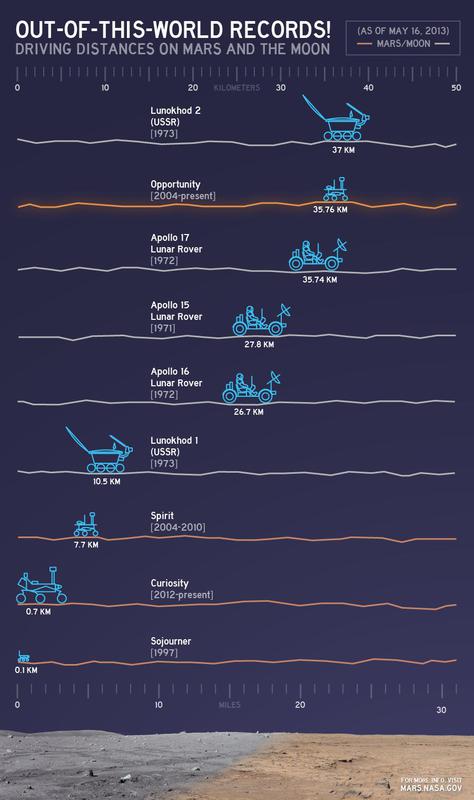
Так это Оппортьюнити пытается побить рекорд, судя по картинке?
Надежная техника, этот Луноход-2 — 40 лет, и все еще при жизни
Ага, как Ленин.
Функционирует? Нет, он всего 4 месяца проработал (просто быстро ездил). А то, что не разрушился, так на Луне нечему его разрушать, кроме метиоритов.
А, сорри, недогледел картинку, спирит сбил с толку
В отношении уголкового отражателя использовать термин «функционирует» — это как-то перебор, это все равно, что говорить, что функционирует зеркало. На Луне взвешенной пыли в атмосфере пыли нет, ветра нет — разве что случайным метеоритом ударило бы.
Погуглил немного, наткнулся ещё и на вот такую статью: ligaspace.my1.ru/news/2009-10-31-180 — интересно, насколько правда.
Что есть неровный предмет, похожий на камешек, посреди первой фотографии, на конце средней «трубки»? Бур?



С возвращением, Кури. Ждем новых данных от тебя ;)
Из чего, интересно, сделан бур?
Уже несколько дней подряд он проделывает за день по несколько десятков метров, и всего километр отделяет его от абсолютного рекорда пробега по космическим телам за пределами Земли. Луноходу-2, сорок лет удерживающему рубеж в 37 км, скоро придется уступить первое место.
А сколько сейчас он набегал? Недавно на Хабре был график, показывающий, что пробег у Любопытного всего то около 700 метров. Где правда?
P.S. Тем временем Opportunity закончил изучение холма Матиевича, нашел глину и теперь отправился в двухкилометровый вояж до новой цели — холма Solander Point.
Уже несколько дней подряд он проделывает за день по несколько десятков метров, и всего километр отделяет его от абсолютного рекорда пробега по космическим телам за пределами Земли. Луноходу-2, сорок лет удерживающему рубеж в 37 км, скоро придется уступить первое место.
Уже несколько дней подряд он проделывает за день по несколько десятков метров, и всего километр отделяет его от абсолютного рекорда пробега по космическим телам за пределами Земли. Луноходу-2, сорок лет удерживающему рубеж в 37 км, скоро придется уступить первое место.
Печально, что не было найдено органических отложений в наиболее подходящем для поиска месте — дне древнего водоема. Надежда на обнаружение жизни всё меньше. Впрочем, может это и не так плохо. Не будет эколого-этических проблем при заселении Марса земной флорой и фауной.
Еще один вопрос. На Марсе очень слабое магнитное поле, нестабильное и вообще не везде. Компас не работает в Земном понимании.
Как работает система навигации Curiosity?
Этот вопрос как-то задавался водителю марсохода, когда была переписка с NASA, но полного ответа так и не поступило.
Т.е. интересует именно последовательность определения координат, дали команду с Земли проехать 100м вперед, повернуть на 30 градусов вправо и проехать еще 30 метров. Как далее определяется истинное положение аппарата в координатах планеты, широта, долгота и с какой точностью?
Навигация по звездам? Но они видны не всегда.
Определяют положения аппарата с орбитального телескопа? Но это не совсем точно и не всегда возможно увидеть аппарат с орбиты.
По Солнцу? Я не видел на Curiosity астролябии или секстанта, хотя, может не знаком с электронным аналогом.
«GPS» на Марсе, или его аналога, вроде как нет.
В общем, каков принцип работы навигационного комплекса и его составляющие?
Как работает система навигации Curiosity?
Этот вопрос как-то задавался водителю марсохода, когда была переписка с NASA, но полного ответа так и не поступило.
Т.е. интересует именно последовательность определения координат, дали команду с Земли проехать 100м вперед, повернуть на 30 градусов вправо и проехать еще 30 метров. Как далее определяется истинное положение аппарата в координатах планеты, широта, долгота и с какой точностью?
Навигация по звездам? Но они видны не всегда.
Определяют положения аппарата с орбитального телескопа? Но это не совсем точно и не всегда возможно увидеть аппарат с орбиты.
По Солнцу? Я не видел на Curiosity астролябии или секстанта, хотя, может не знаком с электронным аналогом.
«GPS» на Марсе, или его аналога, вроде как нет.
В общем, каков принцип работы навигационного комплекса и его составляющие?
Почему не гироскоп + звезды?
Возможно. Давайте представим технологию:
1. Звезды видны не всегда. Звезды — вспомогательный элемент.
2. Гироскоп не один. Минимум три, на тот случай когда один вышел из троя и должен быть хотя бы еще один запасной.
3. Гироскопов не 3 а 6 или 9, т.к. нужно сравнивать показания по группам и вовремя вычленять дефектный.
4. Масса гироскопов (возьмем хотя бы 4, пусть хотя бы два работают одновременно). До Марса каждый грамм на счету.
5. Где будем раскручивать, на Земле? Как потом юстировать? Как перенесет раскрученный гироскоп взлет и посадку, жесткую посадку?
6. Будем раскручивать на Марсе. А как определить начальную точку отсчета?! Где марсоход находится в момент посадки?!
Мне кажется, одних гироскопов мало и тяжело, хотя они скорее всего на аппарате есть.
Я бы предположил, что используется принцип GPS, но наоборот. Т.е. сам марсоход генерирует периодический сигнал — пипикает, проще говоря. А несколько орбитальных станций/спутников (как минимум три), которые точно знают свое положение относительно планеты и относительно друг-друга, ловят этот сигнал, и анализируют временную задержку при получении одного и того же сигнала на каждой станции/спутнике. Тогда несложным тригонометрическим путем можно получить координаты источника сигнала.
Пеленг, в общем, и триангуляция.
1. Звезды видны не всегда. Звезды — вспомогательный элемент.
2. Гироскоп не один. Минимум три, на тот случай когда один вышел из троя и должен быть хотя бы еще один запасной.
3. Гироскопов не 3 а 6 или 9, т.к. нужно сравнивать показания по группам и вовремя вычленять дефектный.
4. Масса гироскопов (возьмем хотя бы 4, пусть хотя бы два работают одновременно). До Марса каждый грамм на счету.
5. Где будем раскручивать, на Земле? Как потом юстировать? Как перенесет раскрученный гироскоп взлет и посадку, жесткую посадку?
6. Будем раскручивать на Марсе. А как определить начальную точку отсчета?! Где марсоход находится в момент посадки?!
Мне кажется, одних гироскопов мало и тяжело, хотя они скорее всего на аппарате есть.
Я бы предположил, что используется принцип GPS, но наоборот. Т.е. сам марсоход генерирует периодический сигнал — пипикает, проще говоря. А несколько орбитальных станций/спутников (как минимум три), которые точно знают свое положение относительно планеты и относительно друг-друга, ловят этот сигнал, и анализируют временную задержку при получении одного и того же сигнала на каждой станции/спутнике. Тогда несложным тригонометрическим путем можно получить координаты источника сигнала.
Пеленг, в общем, и триангуляция.
Для определения местоположения Curoisity в том числе используется местоположение спутника Марса Фобоса относительно солнца.
www.sciencedaily.com/releases/2012/12/121213111732.htm
www.sciencedaily.com/releases/2012/12/121213111732.htm
Спасибо за ссылку!
Судя по этой фразе «The exact location of Curiosity on the surface of Mars is determined using data transmitted from its antennas as well as the space probes that orbit the red planet.» основная технология для определения координат действительно пеленг.
Вспомогательная технология, как я понял, это астровизирование. Т.к. Навигационный треугольник решить на борту марсохода не представляется возможным, у нас нет компаса, а метод равных высот светил требует как раз наличия секстанта и прочих премудростей, которых тоже нет.
Судя по этой фразе «The exact location of Curiosity on the surface of Mars is determined using data transmitted from its antennas as well as the space probes that orbit the red planet.» основная технология для определения координат действительно пеленг.
Вспомогательная технология, как я понял, это астровизирование. Т.к. Навигационный треугольник решить на борту марсохода не представляется возможным, у нас нет компаса, а метод равных высот светил требует как раз наличия секстанта и прочих премудростей, которых тоже нет.
The rover has an Inertial Measurement Unit (IMU) that provides 3-axis information on its position, which is used in rover navigation. The rover's computers are constantly self-monitoring to keep the rover operational, such as by regulating the rover's temperature. Activities such as taking pictures, driving, and operating the instruments are performed in a command sequence that is sent from the flight team to the rover. The rover installed its full surface operations software after the landing because its computers didn't have room for it during flight. The new software essentially replaced the flight software. (википедия со ссылкой на marsprogram.jpl.nasa.gov/msl/mission/rover/brains/)
Здесь, все таки, речь больше идет о рысканье и контроле предельных углов наклона ровера, для своевременного внесения корректировок в движение. Т.е. вы говорите роверу ехать 100м вперед. А его начинает сносить вниз по склону. Вот тут инерционная система вам и подскажет, что надо сделать поправку, чтобы двигаться именно по прямой.
Ну почему же, бывает еще инерциальная навигация.
Бесспорно, скорее всего на ровере именно подобный инерциальный комплекс и стоит. Но у автономной системы будет постоянно накапливаться ошибка — погрешность. И если речь идет о годах работы, то ее необходимо регулярно корректировать, т.е. по пеленгу. И гироскоп настраивается на «ноль», скорее всего, уже после посадки. Все, вроде бы, теперь стало логичным.
Таким образом, можно подытожить изыскания:
1. Основная система навигации — пеленг (триангуляция) и использованием орбитальных аппаратов. Сигнал генерирует ровер.
2. Астровизирование — вспомогательная система.
3. Инерциальная навигация. Для локального определения координат, скоростей, углов наклона. Используется для точности и корректировки движения. Корректируется первыми двумя системами.
Таким образом, можно подытожить изыскания:
1. Основная система навигации — пеленг (триангуляция) и использованием орбитальных аппаратов. Сигнал генерирует ровер.
2. Астровизирование — вспомогательная система.
3. Инерциальная навигация. Для локального определения координат, скоростей, углов наклона. Используется для точности и корректировки движения. Корректируется первыми двумя системами.
Бесспорно, скорее всего на ровере именно подобный инерциальный комплекс и стоит. Но у автономной системы будет постоянно накапливаться ошибка — погрешность.
Я не уверен, что для ровера, перемещающегося со скоростью в пару километров в год накопится ощутимая погрешность.
Ну и собственно:
www.exploremars.org/msl-picture-of-the-day-t-2-days-navigation
Поцитирую оттуда:
When using the blind-drive mode, rover planners have sufficient local imaging from the engineering cameras or Mast Camera to determine that a safe path exists, free of obstacles or hazards. They command the rover to drive a certain distance in a certain direction. In a blind drive, the rover’s computer calculates distance solely from wheel rotation; one full turn of a wheel with no slippage is nearly 63 centimeters (25 inches) of driving.
На погрешность повлияет не дистанция, а сыпучий грунт, по которому ровер скользит на склонах и в котором проскальзывают колеса. Плюс, ровер движется не постоянно, а короткими перебежками, очень много start-stop(ов).
Далее, я понимаю текст следующим образом. Что при планировании очередного маршрута движения, например на следующий день, неделю, месяц, водитель ориентируется в первую очередь на визуальные снимки — что вокруг, нет ли видимых препятствия. Далее, исходя из 63 см пути на оборот колеса планируется маршрут до следующей точки останова, составляется программа.
Но грунт то сыпучий, дорога в гору/с горы/по склону. Выполнив строго загруженную программу вслепую мы можем на следующий день, посмотрев на новые фотографии бортовых камер, увидеть себя (ровер) совсем не в том месте, в котором планировали, и, возможно, не в том виде, а уже на боку или на голове.
Очевидно, инерциальная система должна отслеживать возмущения со стороны, влияние среды на ровер, и вносить своевременные коррективы в движение, чтобы в итоге ровер оказался там, где его хотели бы увидеть «если бы почва была твердой а колеса не проскальзывали», как сказано выше. В конце концов, в предыдущей ссылки они говорили, что критические углы наклона они отслеживают, т.е. как минимум в этот момент ровар остановится и дальше не пойдет.
Я никак не хочу умалять технические возможности Curiosity,
но в 1988г. на «Мире» (он же Венероход ХМ-ВД-2 и далее с 1995г проект LAMA) было реализовано:
… ходовой макет «Мир» с шарнирной рамой и бесклиренсным колесно-шагающим движителем. Преодолеваемый подъём с сыпучим грунтом 34°, уступ – 1 м. Оснащён автоматическим устройством определения опасных препятствий, их объезда по заданному алгоритму и выходу в заданную точку намеченного маршрута.


Здесь можно и видео посмотреть.
Далее, я понимаю текст следующим образом. Что при планировании очередного маршрута движения, например на следующий день, неделю, месяц, водитель ориентируется в первую очередь на визуальные снимки — что вокруг, нет ли видимых препятствия. Далее, исходя из 63 см пути на оборот колеса планируется маршрут до следующей точки останова, составляется программа.
Но грунт то сыпучий, дорога в гору/с горы/по склону. Выполнив строго загруженную программу вслепую мы можем на следующий день, посмотрев на новые фотографии бортовых камер, увидеть себя (ровер) совсем не в том месте, в котором планировали, и, возможно, не в том виде, а уже на боку или на голове.
Очевидно, инерциальная система должна отслеживать возмущения со стороны, влияние среды на ровер, и вносить своевременные коррективы в движение, чтобы в итоге ровер оказался там, где его хотели бы увидеть «если бы почва была твердой а колеса не проскальзывали», как сказано выше. В конце концов, в предыдущей ссылки они говорили, что критические углы наклона они отслеживают, т.е. как минимум в этот момент ровар остановится и дальше не пойдет.
Я никак не хочу умалять технические возможности Curiosity,
но в 1988г. на «Мире» (он же Венероход ХМ-ВД-2 и далее с 1995г проект LAMA) было реализовано:
… ходовой макет «Мир» с шарнирной рамой и бесклиренсным колесно-шагающим движителем. Преодолеваемый подъём с сыпучим грунтом 34°, уступ – 1 м. Оснащён автоматическим устройством определения опасных препятствий, их объезда по заданному алгоритму и выходу в заданную точку намеченного маршрута.
Здесь можно и видео посмотреть.
Очень нетривиальный и очень крутой движитель.
У этой схемы есть недостаток — слишком мало оборудования можно разместить. Т.е. проходимость в ущерб объему исследований.
Насколько я понимаю, такое шасси требует довольно много энергии (равно как и само лазание через завалы). На венере есть халявная энергия — ветер (там плотная атмосфера), на марсе же условия другие. Поэтому это шасси для марса, в текущих условиях, малопригодно.
Как же происходило в те времена распознание непреодолимых препятсвий?
Если и гироскоп — то конечно же не механический, а волоконно-оптический. Его раскручивать не надо, довольно лёгкий, крепкий, точный. Но увод конечно же есть, коррекции обязательно нужны.
44 конференция Луны и планет. Хотя тематика охватывала практически всю Солнечную систему, всё мероприятие прошло под знаком Curiosity и Марса
Звучит футуристично.
Я один пытался прочитать Гленлг на другой раскладке?
>> Луноходу-2, сорок лет удерживающему рубеж в 37 км, скоро придется уступить первое место.
Суки.
Суки.
Вы это о НАСА или Роскосмосе?
Посмотрел в зеркало — согласен, суки. Все просрали.
Юра, прости нас.
Юра, прости нас.
Кстати, а почему все пишут «Юра, прости нас»? Логичней было бы извиняться не перед Гагариным, а перед Королёвым: «Серёжа, прости нас».
Или перед Циолковским.
ИМХО, это все идет вот от этой картинки:
Скрытый текст
Не умаляя достоинств Королева Сергея Павловича, Вы представляете насколько был исследован космос в 1961? Это было нечто. Это как если сейчас (чисто гипотетически) найдут портал в потусторонний мир (обсуждение верю не верю не к месту). И будет группа людей готовящая условного Юру туда отправить.
Внимание вопрос: кто достоин большего уважения за отвагу?
Повторюсь, Королев тоже хапнул в ссвое время неслабо, что уж тут поделать время в нашей стране такое было. Да и в случае неудачи ему тоже не позавидовать было. Хорошо, что все благополучно получилось.
Внимание вопрос: кто достоин большего уважения за отвагу?
Повторюсь, Королев тоже хапнул в ссвое время неслабо, что уж тут поделать время в нашей стране такое было. Да и в случае неудачи ему тоже не позавидовать было. Хорошо, что все благополучно получилось.
Мы же тут не решаем у кого яйца из более крепкого материала. Гагарин был военным лётчиком, солдатом, ему дали приказ и он его с честью выполнил. А Королёв именно двигал ракетостроение в СССР, он выбивал финансирование у министров, доказывал, что космос нам необходим. Космос не был для Гагарина делом всей жизни, а для Королёва был, поэтому за то, что мы что-то там просрали логичней извиняться перед ним.
В принципе, если судить о личной отваге, то так оно и есть — непосредственно жизнью рискую космонавты, а не конструкторы. Но, с другой стороны, вклад конструкторов, а тем более таких как Сергей Королев или Вернер фон Браун в освоение космоса несопоставим с вкладом самих космонавтов. На них же и выше степень ответственности.
Гагарин — это просто наиболее яркий символ.
Впрочем не все так плохо, как на фото с его памятником. Следующим своим постом я это докажу.
Впрочем не все так плохо, как на фото с его памятником. Следующим своим постом я это докажу.
Согласен, мне тоже не кажется что всё плохо. Как мне думается просто в СССР информация о неудачах в космической отрасли была по большей части недоступна простому обывателю, в смысле по новостям тогда не трубили, что мол «дорогие товарищи, сегодня из-за ошибки в расчетах разбилась автоматическая станция Луна-15», а сейчас инфа более доступна, и все кругом трубят про Фобос-Грунт. Из-за этого кажется, что сейчас всё хуже чем раньше.
Тогда о разбившихся станциях проще было молчать, потому, что всегда можно было поговорить о неразбившихся…
Дело в том, что тогда на каждую провалившуюся миссию было несколько успешных, поэтому все неудачи укладывались в пределы допустимой погрешности.
Это справедливо для лунных аппаратов (точнее — для лунных аппаратов 70-х годов) и отчасти венерианских (хотя там тоже хватало неуспешных пусков, совсем все хорошо пошло только к концу программы). С Марсом СССР патологически не везло: из всех пусков (около двух десятков) по Марсу только Марс-3 полностью выполнил поставленные задачи. Частично успешным можно считать Марс-5, хоть и проработал он намного меньше ожидаемого.
Отличные посты! Спасибо за освещение процесса освоения марса!
Sign up to leave a comment.
Curiosity вышел из отпуска