В данной статье хочу поделиться своим опытом написания linux драйвера для цветного дисплея 320х240 от производителя Newhavendisplays, а именно NHD-5.7-320240WFB-CTXI-T1 под embedded linux. Идея написать статью созрела именно по причине того, что ресурсов по написанию framebufer(FB) драйверов не так уж и много, тем более, на русском языке. Модуль был написан далеко не под самое новое ядро(2.6.30), поэтому допускаю, что в интерфейсах FB много чего поменялось с тех пор. Но, тем не менее, надеюсь, статья будет интересна интересующимся разработкой уровня ядра linux. Не исключаю, что реализацию можно было бы сделать проще и изящней, поэтому комментарии и замечания приветствуются.


Предистория
Изначально стояла задача написать драйвер, к которому можно было бы обращаться с помощью стандартных средств типа QT embedded, чтобы в конечном итоге соорудить простую менюшку с иконками и текстом для взаимодействия с пользователем. Платформой служила платка на AT91SAM9G45, a точнее www.armdevs.com/IPC-SAM9G45.html
Стримить видео не планировалось. AT91SAM9G45 содержит вполне себе работоспособный встроенный LCD контроллер с поддержкой DMA и довольно скоростной шиной, с которыми потенциально можно было бы добиться приличной скорости и для видео, но увы, хардварно он не совместим с SSD1963. Поэтому было принято решение заюзать для этой цели обычный GPIO интерфейс, как единственную доступную альтернативу.
Интерфейс контроллера SSD1963
Интерфейс контроллера проще всего представить в виде рисунка из даташита дисплея:
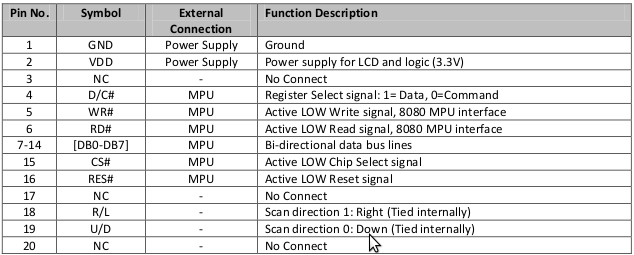
С точки зрения разработчика драйвера нас интересуют пины DB0 – DB7. Это 8-битная шина данных, и пины DC, RD, WR, CS, RES которые используются для управления процессом передачи данных на SSD1963.
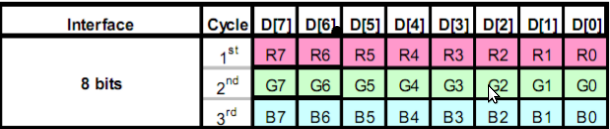
Что касается формата передаваемых данных, данный дисплей использует формат 888. Что значит: 8 байт – Red, 8 байт – Green, 8 байт – Blue. Еще довольно часто в дисплеях такого типа можно встретить варианты 555, 565, и т.д., но это не наш случай. Формат передаваемых данных изображен на рисунке.
Перед тем, как первый байт данных будет выставлен на шину, должно последовать переключения пинов CS и WR из 1 в 0. А после того как байт данных будет установлен, следует переключение CS и WR из 0 в 1, что, собственно и осуществляет передачу байта данных в контроллер SSD1963. Более детально осциллограммы сигналов можно посмотреть в даташите на контроллер. www.newhavendisplay.com/app_notes/SSD1963.pdf
В исходном коде интерфейс опишем массивами GPIO пинов:
Функция передачи байтов по этому интерфейсу имеет вид:
Как видим, с помощью такой функции можно отправлять на LCD контроллер как комманды (например, для конфигурации дисплея), так и данные в виде пикселей.
Фреймбуфер модель ядра
Как известно, linux ядро предоставляет интерфейсы для разных типов драйверов устройств – char drivers, block drivers, usb drivers и т. д. Framebuffer driver также являет собой отдельную подсистему в линуксовой модели драйверов. Основной структурой, которая используется для репрезентации FB драйвера является struct fb_info в linux/fb.h. Кстати, этот хедер файл также будет интересен любителям юмора в коде linux ядра, так как содержит интересный дефайн —
#define STUPID_ACCELF_TEXT_SHIT. Думаю, название говорит само за себя. Но, вернемся к структуре fb_info. Нас будут интересовать две структуры, которые она содержит – fb_var_screeninfo и fb_fix_screeninfo. Инициализируем их параметрами нашего дисплея.
В нашем случае под пиксель будет выделено 4 байта: 8-Red, 8-Green, 8-Blue, 8-Transparent
Поясню некоторые из полей структур:
.type – способ размещения битов, описывающих пиксели в памяти. Packed pixels означает, что байты (в нашем случае 8888 будут размещены последовательно один за другим).
.visual – глубина цвета дисплея. В нашем случае это truecolor – глубина цвета 24bit
.accel – хардварная акселерация
.transp, red, green, blue – как раз и задают наш 8,8,8,8 формат в виде трех полей – offset, length и msb_right.
Также, для того, чтобы зарегистрировать наш драйвер в ядре, необходимо описать еще две сущности – устройство(device) и драйвер(driver). Опишем FB устройство(struct ssd1963), которое будет содержать страницы нашей видео памяти (struct ss1963_page):
Инициализация
Как и для любого другого модуля ядра линукс, опишем пару функций init/remove. Начнем с init. Framebuffer драйвера, как правило регистрируются в системе как platform_driver:
Platform driver в свою очередь вызывает функцию probe для конкретного драйвера, которая и выполняет все необходимые операции – аллокацию памяти, резервирование ресурсов, инициализацию структур и т.д. Приведем пример функции ssd1963_probe:
Несколько комментариев к функции. Здесь мы последовательно:
— Выделяем память под наше устройство ssd1963
— Выделяем память и инициализируем струкруру fb_info, сначала значениями по умолчанию(framebuffer_alloc), так как многие параметры нам изменять не нужно, а затем конкретными значениями для нашего драйвера, как fb_var_screeninfo, fb_fix_screeninfo и fb_ops, которую мы рассмотрим немного позже.
— Выделяет память под непрерывный буфер пикселей в виртуальной памяти, которая будет использоваться для записи user-space процессами.
— Выделяем ssd1963_page для каждой страницы в виртуальной памяти фреймбуфера. Каждая ssd1963_page будет содержать адрес начала буфера страницы по отношению к общему буферу FB, сдвиг по х, сдвиг по y, и длину буфера страницы. В нашем случае емкость фреймбуфера = line_length*height = 320*4*240 = 307200 байт. Для такой емкости буфера нам потребуется line_length*height/PAGE_SIZE = 307200/4096 = 75 страниц. Отметим, как они будут располагаться в памяти FB. Понимание этого расположения страниц пригодится нам при рассмотрении функции ssd1963_copy немного позже:

— Регистрируем наш FB в системе(register_framebuffer) и инициализируем процедуру отложенного обновления данных (fb_deferred_io_init), детальней об этом в разделе “операции с фреймбуфером”.
— ssd1963_setup конфигурирует необходимые GPIO на AT91SAM9G45 CPU и выполняет начальную настройку LCD контроллера. Алгоритм начальной конфигурации в виде отправки набора загадочных байт в хексе взят из документации на SSD1963, поэтому приведу здесь только часть функции:
— ssd1963_update_all устанавливает флаг must_update=1 для всех страниц и инициирует механизм обновления дисплея в отложенном контексте с помощью вызова schedule_delayed_work(&item->info->deferred_work, fbdefio->delay);
Итак, с init разобрались, с функцией remove все куда проще, освобождаем выделенную память, и возвращаем FB структуры ядру:
Операции с фреймбуфером
Итак, пришло время рассмотреть структуру fb_ops:
Я не привожу здесь все методы структуры, любопытный читатель сможет найти их в исходном коде модуля либо в любом другом драйвере в коде ядра в каталоге drivers/video. Как вы уже догадались, структура fb_ops описывает действия, которые может осуществлять наш драйвер. К счастью, разработчики ядра частично облегчили нам работу, предоставив стандартные функции для работы с FB, имеющие суфикс sys_ или fb_sys, например fb_sys_read. Нам нужно лишь добавить в нашу имплементацию функций из fb_ops (ssd1963_read, ssd1963_write и др.) функционал, позволяющий выполнять обновление данных в нашей импровизированной видео памяти, когда в этом возникнет необходимость.
Например, функция ssd1963_fillrect будет выглядеть так:
Очевидно, что системный вызов fb_fillrect обновит видео данные в определенной прямоугольной области экрана, поэтому нам нужно указать, какие именно страницы нам нужно обновить, пометив их флажком must_update, и затем вызвав вручную процедуру обновления видеопамяти:
Обновление данных в видеопамяти происходит в виде отложенном контексте(deferred context). User-space приложение, работающее с графикой, не будет ожидать завершения записи каждого кадра в видеопамять, что вполне логично. Отложенная обработка в fb_info определяется в виде структуры fb_deferred_io:
Функция ssd1963_update c прототипом
void ssd1963_update(struct fb_info *info, struct list_head *pagelist);
не обновляет все страницы, а только страницы, которые были изменены в результате перезаписи user-space процессом, или в результате системного вызова, типа fb_fillrect и компании. Соответственно функция имеет вид:
На данном этапе, вы наверняка задались вопросом, что делает функция ssd1963_copy. Она как-раз-таки делает всю “грязную” работу по передаче данных из страниц видеопамяти на искусственно созданную, 8-битную шину на базе GPIO.
Функция ssd1963_copy
Здесь необходимо вспомнить рисунок, на котором изображено как соотносятся наши страницы в памяти с пикселями дисплея. Видим, например, что в page[0] хранится информация для трех верхних линий дисплея по 320 пикселей, и 64 пикселя для 4-й линии. Таких страниц у нас 75, и картинка с рисунка, и как не сложно заметить, page[5] будет выглядеть так же – 3 линии по 320 и одна по 64. Соответственно, функция, принимающая индекс страницы как параметр будет содержать switch(index%5) и в зависимости от офсетов для каждой конкретной страницы отправлять данные в выделенное ей “окно” в памяти дисплея. Функция довольно длинная, поэтому приведу лишь ее часть:
Здесь функция nhd_set_window конфигурирует с помощью уже известных нам nhd_write_data(NHD_COMMAND, …); область дисплея, в которую будет производится запись данных(пикселей).
nhd_write_data(NHD_COMMAND, 0x2c); — команда LCD контроллеру о том, что сейчас последует поток данных.
Ну и напоследок, скриншот работы программы ts_calibrate из пакета tslib на устройстве с дисплеем.
Кому интересно — могу выслать полный код модуля:

Предистория
Изначально стояла задача написать драйвер, к которому можно было бы обращаться с помощью стандартных средств типа QT embedded, чтобы в конечном итоге соорудить простую менюшку с иконками и текстом для взаимодействия с пользователем. Платформой служила платка на AT91SAM9G45, a точнее www.armdevs.com/IPC-SAM9G45.html
Стримить видео не планировалось. AT91SAM9G45 содержит вполне себе работоспособный встроенный LCD контроллер с поддержкой DMA и довольно скоростной шиной, с которыми потенциально можно было бы добиться приличной скорости и для видео, но увы, хардварно он не совместим с SSD1963. Поэтому было принято решение заюзать для этой цели обычный GPIO интерфейс, как единственную доступную альтернативу.
Интерфейс контроллера SSD1963
Интерфейс контроллера проще всего представить в виде рисунка из даташита дисплея:
С точки зрения разработчика драйвера нас интересуют пины DB0 – DB7. Это 8-битная шина данных, и пины DC, RD, WR, CS, RES которые используются для управления процессом передачи данных на SSD1963.
Что касается формата передаваемых данных, данный дисплей использует формат 888. Что значит: 8 байт – Red, 8 байт – Green, 8 байт – Blue. Еще довольно часто в дисплеях такого типа можно встретить варианты 555, 565, и т.д., но это не наш случай. Формат передаваемых данных изображен на рисунке.
Перед тем, как первый байт данных будет выставлен на шину, должно последовать переключения пинов CS и WR из 1 в 0. А после того как байт данных будет установлен, следует переключение CS и WR из 0 в 1, что, собственно и осуществляет передачу байта данных в контроллер SSD1963. Более детально осциллограммы сигналов можно посмотреть в даташите на контроллер. www.newhavendisplay.com/app_notes/SSD1963.pdf
В исходном коде интерфейс опишем массивами GPIO пинов:
static unsigned int nhd_data_pin_config[] = { AT91_PIN_PE13, AT91_PIN_PE14, AT91_PIN_PE17, AT91_PIN_PE18, AT91_PIN_PE19, AT91_PIN_PE20, AT91_PIN_PE21, AT91_PIN_PE22 }; static unsigned int nhd_gpio_pin_config[] = { AT91_PIN_PE0, // RESET AT91_PIN_PE2, // DC AT91_PIN_PE5, // CLK AT91_PIN_PE6, // RD AT91_PIN_PE1 // WR };
Функция передачи байтов по этому интерфейсу имеет вид:
static void nhd_write_data(int command, unsigned short value) { int i; at91_set_gpio_output(AT91_PIN_PE12, 1); //R/D for (i=0; i<ARRAY_SIZE(nhd_data_pin_config); i++) at91_set_gpio_output(nhd_data_pin_config[i], (value>>i)&0x01); if (command) at91_set_gpio_output(AT91_PIN_PE10, 0); //D/C else at91_set_gpio_output(AT91_PIN_PE10, 1); //D/C at91_set_gpio_output(AT91_PIN_PE11, 0); //WR at91_set_gpio_output(AT91_PIN_PE26, 0); //CS at91_set_gpio_output(AT91_PIN_PE26, 1); //CS at91_set_gpio_output(AT91_PIN_PE11, 1); //WR }
Как видим, с помощью такой функции можно отправлять на LCD контроллер как комманды (например, для конфигурации дисплея), так и данные в виде пикселей.
Фреймбуфер модель ядра
Как известно, linux ядро предоставляет интерфейсы для разных типов драйверов устройств – char drivers, block drivers, usb drivers и т. д. Framebuffer driver также являет собой отдельную подсистему в линуксовой модели драйверов. Основной структурой, которая используется для репрезентации FB драйвера является struct fb_info в linux/fb.h. Кстати, этот хедер файл также будет интересен любителям юмора в коде linux ядра, так как содержит интересный дефайн —
#define STUPID_ACCELF_TEXT_SHIT. Думаю, название говорит само за себя. Но, вернемся к структуре fb_info. Нас будут интересовать две структуры, которые она содержит – fb_var_screeninfo и fb_fix_screeninfo. Инициализируем их параметрами нашего дисплея.
static struct fb_fix_screeninfo ssd1963_fix __initdata = { .id = "SSD1963", .type = FB_TYPE_PACKED_PIXELS, .visual = FB_VISUAL_TRUECOLOR, .accel = FB_ACCEL_NONE, .line_length = 320 * 4, }; static struct fb_var_screeninfo ssd1963_var __initdata = { .xres = 320, .yres = 240, .xres_virtual = 320, .yres_virtual = 240, .width = 320, .height = 240, .bits_per_pixel = 32, .transp = {24, 8, 0}, .red = {16, 8, 0}, .green = {8, 8, 0}, .blue = {0, 8, 0}, .activate = FB_ACTIVATE_NOW, .vmode = FB_VMODE_NONINTERLACED, };
В нашем случае под пиксель будет выделено 4 байта: 8-Red, 8-Green, 8-Blue, 8-Transparent
Поясню некоторые из полей структур:
.type – способ размещения битов, описывающих пиксели в памяти. Packed pixels означает, что байты (в нашем случае 8888 будут размещены последовательно один за другим).
.visual – глубина цвета дисплея. В нашем случае это truecolor – глубина цвета 24bit
.accel – хардварная акселерация
.transp, red, green, blue – как раз и задают наш 8,8,8,8 формат в виде трех полей – offset, length и msb_right.
Также, для того, чтобы зарегистрировать наш драйвер в ядре, необходимо описать еще две сущности – устройство(device) и драйвер(driver). Опишем FB устройство(struct ssd1963), которое будет содержать страницы нашей видео памяти (struct ss1963_page):
struct ssd1963_page { unsigned short x; unsigned short y; unsigned long *buffer; unsigned short len; int must_update; }; struct ssd1963 { struct device *dev; struct fb_info *info; unsigned int pages_count; struct ssd1963_page *pages; }; struct platform_driver ssd1963_driver = { .probe = ssd1963_probe, .remove = ssd1963_remove, .driver = { .name = "ssd1963" } };
Инициализация
Как и для любого другого модуля ядра линукс, опишем пару функций init/remove. Начнем с init. Framebuffer драйвера, как правило регистрируются в системе как platform_driver:
static int __init ssd1963_init(void) { int ret = 0; ret = platform_driver_register(&ssd1963_driver); if (ret) { pr_err("%s: unable to platform_driver_register\n", __func__); } return ret; } module_init(ssd1963_init);
Platform driver в свою очередь вызывает функцию probe для конкретного драйвера, которая и выполняет все необходимые операции – аллокацию памяти, резервирование ресурсов, инициализацию структур и т.д. Приведем пример функции ssd1963_probe:
static int __init ssd1963_probe(struct platform_device *dev) { int ret = 0; struct ssd1963 *item; struct fb_info *info; // Allocating memory for ssd1663 device item = kzalloc(sizeof(struct ssd1963), GFP_KERNEL); if (!item) { dev_err(&dev->dev, "%s: unable to kzalloc for ssd1963\n", __func__); ret = -ENOMEM; goto out; } item->dev = &dev->dev; dev_set_drvdata(&dev->dev, item); // Initializing fb_info struct using kernel framebuffer API info = framebuffer_alloc(sizeof(struct ssd1963), &dev->dev); if (!info) { ret = -ENOMEM; dev_err(&dev->dev, "%s: unable to framebuffer_alloc\n", __func__); goto out_item; } item->info = info; //Here info->par pointer is commonly used to store private data // In our case, we can use it to store pointer to ssd1963 device info->par = item; info->dev = &dev->dev; info->fbops = &ssd1963_fbops; info->flags = FBINFO_FLAG_DEFAULT; info->fix = ssd1963_fix; info->var = ssd1963_var; ret = ssd1963_video_alloc(item); if (ret) { dev_err(&dev->dev, "%s: unable to ssd1963_video_alloc\n", __func__); goto out_info; } info->screen_base = (char __iomem *)item->info->fix.smem_start; ret = ssd1963_pages_alloc(item); if (ret < 0) { dev_err(&dev->dev, "%s: unable to ssd1963_pages_init\n", __func__); goto out_video; } info->fbdefio = &ssd1963_defio; fb_deferred_io_init(info); ret = register_framebuffer(info); if (ret < 0) { dev_err(&dev->dev, "%s: unable to register_frambuffer\n", __func__); goto out_pages; } ssd1963_setup(item); ssd1963_update_all(item); return ret; out_pages: ssd1963_pages_free(item); out_video: ssd1963_video_free(item); out_info: framebuffer_release(info); out_item: kfree(item); out: return ret; }
Несколько комментариев к функции. Здесь мы последовательно:
— Выделяем память под наше устройство ssd1963
— Выделяем память и инициализируем струкруру fb_info, сначала значениями по умолчанию(framebuffer_alloc), так как многие параметры нам изменять не нужно, а затем конкретными значениями для нашего драйвера, как fb_var_screeninfo, fb_fix_screeninfo и fb_ops, которую мы рассмотрим немного позже.
— Выделяет память под непрерывный буфер пикселей в виртуальной памяти, которая будет использоваться для записи user-space процессами.
— Выделяем ssd1963_page для каждой страницы в виртуальной памяти фреймбуфера. Каждая ssd1963_page будет содержать адрес начала буфера страницы по отношению к общему буферу FB, сдвиг по х, сдвиг по y, и длину буфера страницы. В нашем случае емкость фреймбуфера = line_length*height = 320*4*240 = 307200 байт. Для такой емкости буфера нам потребуется line_length*height/PAGE_SIZE = 307200/4096 = 75 страниц. Отметим, как они будут располагаться в памяти FB. Понимание этого расположения страниц пригодится нам при рассмотрении функции ssd1963_copy немного позже:
— Регистрируем наш FB в системе(register_framebuffer) и инициализируем процедуру отложенного обновления данных (fb_deferred_io_init), детальней об этом в разделе “операции с фреймбуфером”.
— ssd1963_setup конфигурирует необходимые GPIO на AT91SAM9G45 CPU и выполняет начальную настройку LCD контроллера. Алгоритм начальной конфигурации в виде отправки набора загадочных байт в хексе взят из документации на SSD1963, поэтому приведу здесь только часть функции:
void ssd1963_setup(struct ssd1963 *item) { nhd_init_gpio_regs(); //initializations of pins in nhd_data-gpio_pin_config at91_set_gpio_output(AT91_PIN_PE27, 0); //RESET udelay(5); at91_set_gpio_output(AT91_PIN_PE27, 1); //RESET udelay(100); nhd_write_data(NHD_COMMAND, 0x01); //Software Reset ... nhd_write_to_register(0xe0, 0x03); //LOCK PLL nhd_write_data(NHD_COMMAND, 0xb0); //SET LCD MODE TFT 18Bits nhd_write_data(NHD_DATA, 0x0c); //SET MODE 24 bits & hsync+Vsync+DEN … }
— ssd1963_update_all устанавливает флаг must_update=1 для всех страниц и инициирует механизм обновления дисплея в отложенном контексте с помощью вызова schedule_delayed_work(&item->info->deferred_work, fbdefio->delay);
Итак, с init разобрались, с функцией remove все куда проще, освобождаем выделенную память, и возвращаем FB структуры ядру:
static int ssd1963_remove(struct platform_device *device) { struct fb_info *info = platform_get_drvdata(device); struct ssd1963 *item = (struct ssd1963 *)info->par; if (info) { unregister_framebuffer(info); ssd1963_pages_free(item); ssd1963_video_free(item); framebuffer_release(info); kfree(item); } return 0; }
Операции с фреймбуфером
Итак, пришло время рассмотреть структуру fb_ops:
static struct fb_ops ssd1963_fbops = { .owner = THIS_MODULE, .fb_read = fb_sys_read, .fb_write = ssd1963_write, .fb_fillrect = ssd1963_fillrect, .fb_copyarea = ssd1963_copyarea, .fb_imageblit = ssd1963_imageblit, .fb_setcolreg = ssd1963_setcolreg, .fb_blank = ssd1963_blank, };
Я не привожу здесь все методы структуры, любопытный читатель сможет найти их в исходном коде модуля либо в любом другом драйвере в коде ядра в каталоге drivers/video. Как вы уже догадались, структура fb_ops описывает действия, которые может осуществлять наш драйвер. К счастью, разработчики ядра частично облегчили нам работу, предоставив стандартные функции для работы с FB, имеющие суфикс sys_ или fb_sys, например fb_sys_read. Нам нужно лишь добавить в нашу имплементацию функций из fb_ops (ssd1963_read, ssd1963_write и др.) функционал, позволяющий выполнять обновление данных в нашей импровизированной видео памяти, когда в этом возникнет необходимость.
Например, функция ssd1963_fillrect будет выглядеть так:
static void ssd1963_fillrect(struct fb_info *p, const struct fb_fillrect *rect) { sys_fillrect(p, rect); ssd1963_touch(p, rect->dx, rect->dy, rect->width, rect->height); }
Очевидно, что системный вызов fb_fillrect обновит видео данные в определенной прямоугольной области экрана, поэтому нам нужно указать, какие именно страницы нам нужно обновить, пометив их флажком must_update, и затем вызвав вручную процедуру обновления видеопамяти:
static void ssd1963_touch(struct fb_info *info, int x, int y, int w, int h) { struct fb_deferred_io *fbdefio = info->fbdefio; struct ssd1963 *item = (struct ssd1963 *)info->par; int i, ystart, yend; if (fbdefio) { //Touch the pages, so the deferred io will update them. for (i=0; i<item->pages_count; i++) { ystart=item->pages[i].y; yend=item->pages[i].y+(item->pages[i].len/info->fix.line_length)+1; if (!((y+h)<ystart || y>yend)) { item->pages[i].must_update=1; } } //Schedule the deferred IO to kick in after a delay. schedule_delayed_work(&info->deferred_work, fbdefio->delay); } }
Обновление данных в видеопамяти происходит в виде отложенном контексте(deferred context). User-space приложение, работающее с графикой, не будет ожидать завершения записи каждого кадра в видеопамять, что вполне логично. Отложенная обработка в fb_info определяется в виде структуры fb_deferred_io:
static struct fb_deferred_io ssd1963_defio = { .delay = HZ / 20, .deferred_io = &ssd1963_update, };
Функция ssd1963_update c прототипом
void ssd1963_update(struct fb_info *info, struct list_head *pagelist);
не обновляет все страницы, а только страницы, которые были изменены в результате перезаписи user-space процессом, или в результате системного вызова, типа fb_fillrect и компании. Соответственно функция имеет вид:
static void ssd1963_update(struct fb_info *info, struct list_head *pagelist) { struct ssd1963 *item = (struct ssd1963 *)info->par; struct page *page; int i; list_for_each_entry(page, pagelist, lru) { item->pages[page->index].must_update=1; } //Copy changed pages. for (i=0; i<item->pages_count; i++) { if (item->pages[i].must_update) { item->pages[i].must_update=0; ssd1963_copy(item, i); } } }
На данном этапе, вы наверняка задались вопросом, что делает функция ssd1963_copy. Она как-раз-таки делает всю “грязную” работу по передаче данных из страниц видеопамяти на искусственно созданную, 8-битную шину на базе GPIO.
Функция ssd1963_copy
Здесь необходимо вспомнить рисунок, на котором изображено как соотносятся наши страницы в памяти с пикселями дисплея. Видим, например, что в page[0] хранится информация для трех верхних линий дисплея по 320 пикселей, и 64 пикселя для 4-й линии. Таких страниц у нас 75, и картинка с рисунка, и как не сложно заметить, page[5] будет выглядеть так же – 3 линии по 320 и одна по 64. Соответственно, функция, принимающая индекс страницы как параметр будет содержать switch(index%5) и в зависимости от офсетов для каждой конкретной страницы отправлять данные в выделенное ей “окно” в памяти дисплея. Функция довольно длинная, поэтому приведу лишь ее часть:
static void ssd1963_copy(struct ssd1963 *item, unsigned int index) { unsigned short x,y, startx, endx, starty, endy, offset; unsigned long *buffer; unsigned int len; unsigned int count; x = item->pages[index].x; y = item->pages[index].y; buffer = item->pages[index].buffer; len = item->pages[index].len; switch (index%5) { case 0: offset = 0; startx = x; starty = y; endx = 319; endy = y+2; len = 960; nhd_set_window(startx, endx, starty, endy); nhd_write_data(NHD_COMMAND, 0x2c); for (count = 0; count < len; count++) { nhd_write_data(NHD_DATA,(unsigned char)((buffer[count+offset])>>16)); //red nhd_write_data(NHD_DATA,(unsigned char)((buffer[count+offset])>>8)); //green nhd_write_data(NHD_DATA,(unsigned char)(buffer[count+offset])); //blue } offset = len; startx = x; starty = y+3; endx = x+63; endy = y+3; len = 64; nhd_set_window(startx, endx, starty, endy); nhd_write_data(NHD_COMMAND, 0x2c); for (count = 0; count < len; count++) { nhd_write_data(NHD_DATA,(unsigned char)((buffer[count+offset])>>16)); //red nhd_write_data(NHD_DATA,(unsigned char)((buffer[count+offset])>>8)); //green nhd_write_data(NHD_DATA,(unsigned char)(buffer[count+offset])); //blue } break; case 1: ….
Здесь функция nhd_set_window конфигурирует с помощью уже известных нам nhd_write_data(NHD_COMMAND, …); область дисплея, в которую будет производится запись данных(пикселей).
nhd_write_data(NHD_COMMAND, 0x2c); — команда LCD контроллеру о том, что сейчас последует поток данных.
Ну и напоследок, скриншот работы программы ts_calibrate из пакета tslib на устройстве с дисплеем.
Кому интересно — могу выслать полный код модуля:
