Нахождение экстремума(минимума или максимума) целевой функции является важной задачей в математике и её приложениях(в частности, в машинном обучении есть задача curve-fitting). Наверняка каждый слышал о методе наискорейшего спуска (МНС) и методе Ньютона (МН). К сожалению, эти методы имеют ряд существенных недостатков, в частности — метод наискорейшего спуска может очень долго сходиться в конце оптимизации, а метод Ньютона требует вычисления вторых производных, для чего требуется очень много вычислений.
Для устранения недостатков, как это часто бывает, нужно глубже погрузиться в предметную область и добавить ограничения на входные данные. В частности: МНС и МН имеют дело с произвольными функциями. В статистике и машинном обучении часто приходится иметь дело с методом наименьших квадратов (МНК). Этот метод минимизирует сумму квадрата ошибок, т.е. целевая функция представляется в виде
Алгоритм Левенберга — Марквардта является нелинейным методом наименьших квадратов. Статья содержит:
- объяснение алгоритма
- объяснение методов: наискорейшего спуска, Ньтона, Гаусса-Ньютона
- приведена реализация на Python с исходниками на github
- сравнение методов
В коде использованы дополнительные библиотеки, такие как numpy, matplotlib. Если у вас их нет — очень рекомендую установить их из пакета Anaconda for Python
Зависимости
Алгоритм Левенберга — Марквардта опирается на методы, приведённые в блок-схеме
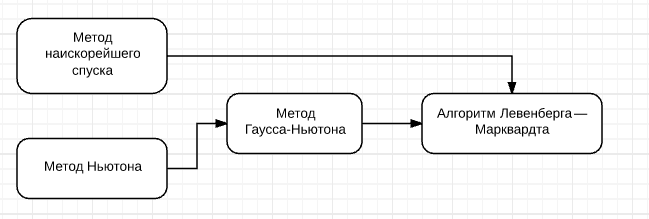
Поэтому, сначала, необходимо изучить их. Этим и займёмся
Определения
— наша целевая функция. Мы будем минимизировать
. В этом случае,
— градиент функции
в точке
—
, при котором
является локальным минимумом, т.е. если существует проколотая окрестность
, такая что
— глобальный минимум, если
, т.е.
— матрица Якоби для функции
в точке
, так как в этом случае мы имеем дело с отображением из
-мерного вектора в
-мерный, поэтому нельзя просто посчитать первые производные по одному измерению, как это происходит в градиенте. Подробнее
— матрица Гессе (матрица вторых производных). Необходима для квадратичной аппроксимации
Выбор функции
В математической оптимизации есть функции, на которых тестируются новые методы.
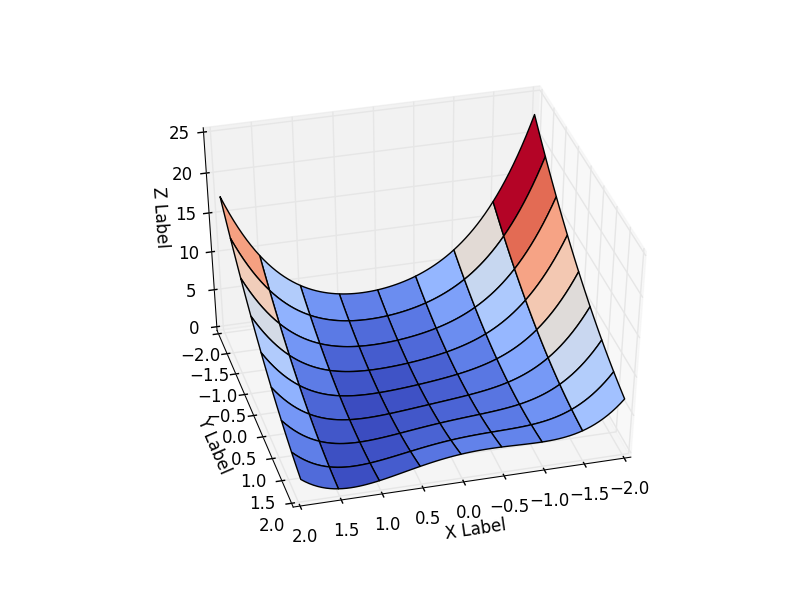
Одна из таких функция — Функция Розенброка. В случае функции двух переменных она определяется как
Я принял . Т.е. функция имеет вид:
Будем рассматривать поведение функции на интервале
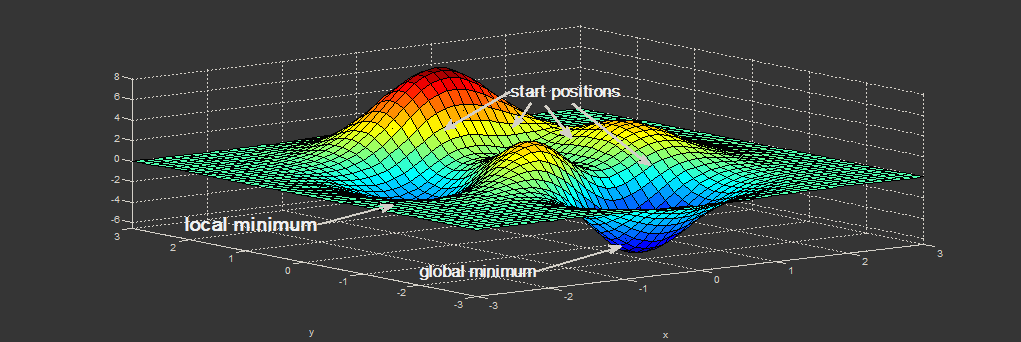
Эта функция определена неотрицательно, имеет минимум
В коде проще инкапсулировать все данные о функции в один класс и брать класс той функции, которая потребуется. Результат зависит от начальной точки оптимизации. Выберем её как . Как видно из графика, в этой точке функция принимает наибольшее значение на интервале.
class Rosenbrock: initialPoint = (-2, -2) camera = (41, 75) interval = [(-2, 2), (-2, 2)] """ Целевая функция """ @staticmethod def function(x): return 0.5*(1-x[0])**2 + 0.5*(x[1]-x[0]**2)**2 """ Для нелинейного МНК - возвращает вектор-функцию r """ @staticmethod def function_array(x): return np.array([1 - x[0] , x[1] - x[0] ** 2]).reshape((2,1)) @staticmethod def gradient(x): return np.array([-(1-x[0]) - (x[1]-x[0]**2)*2*x[0], (x[1] - x[0]**2)]) @staticmethod def hesse(x): return np.array(((1 -2*x[1] + 6*x[0]**2, -2*x[0]), (-2 * x[0], 1))) @staticmethod def jacobi(x): return np.array([ [-1, 0], [-2*x[0], 1]]) """ Векторизация для отрисовки поверхности Детали: http://www.mathworks.com/help/matlab/matlab_prog/vectorization.html """ @staticmethod def getZMeshGrid(X, Y): return 0.5*(1-X)**2 + 0.5*(Y - X**2)**2
Метод наискорейшего спуска(Steepest Descent)
Сам метод крайне прост. Принимаем , т.е. целевая функция совпадает с заданной.
Нужно найти — направление наискорейшего спуска функции
в точке
.
может быть линейно аппроксимирована в точке
:
где — угол между вектором
.
следует из скалярного произведения
Так как мы минимизируем , то чем больше разница в
, тем лучше. При
выражение будет максимально(
, норма вектора всегда неотрицательна), а
будет только если вектора
будут противоположны, поэтому
Направление у нас верное, но делая шаг длиной можно уйти не туда. Делаем шаг меньше:
Теоретически, чем меньше шаг, тем лучше. Но тогда пострадает скорость сходимости. Рекомендуемое значение
В коде это выглядит так: сначала базовый класс-оптимизатор. Передаём всё, что понадобится в дальнейшем( матрицы Гессе, Якоби, сейчас не нужны, но понадобятся для других методов)
class Optimizer: def __init__(self, function, initialPoint, gradient=None, jacobi=None, hesse=None, interval=None, epsilon=1e-7, function_array=None, metaclass=ABCMeta): self.function_array = function_array self.epsilon = epsilon self.interval = interval self.function = function self.gradient = gradient self.hesse = hesse self.jacobi = jacobi self.name = self.__class__.__name__.replace('Optimizer', '') self.x = initialPoint self.y = self.function(initialPoint) "Возвращает следующую координату по ходу оптимизационного процесса" @abstractmethod def next_point(self): pass """ Движемся к следующей точке """ def move_next(self, nextX): nextY = self.function(nextX) self.y = nextY self.x = nextX return self.x, self.y
Код самого оптимизатора:
class SteepestDescentOptimizer(Optimizer): ... def next_point(self): nextX = self.x - self.learningRate * self.gradient(self.x) return self.move_next(nextX)
Результат оптимизации:
| Итерация | X | Y | Z |
|---|---|---|---|
| 25 | 0.383 | -0.409 | 0.334 |
| 75 | 0.693 | 0.32 | 0.058 |
| 532 | 0.996 | 0.990 |
Бросается в глаза: как быстро шла оптимизация в 0-25 итерациях, в 25-75 уже медленне, а в конце потребовалось 457 итераций, чтобы приблизиться к нулю вплотную. Такое поведение очень свойственно для МНС: очень хорошая скорость сходимости вначале, плохая в конце.
Метод Ньютона
Сам Метод Ньютона ищет корень уравнения, т.е. такой , что
. Это не совсем то, что нам нужно, т.к. функция может иметь экстремум не обязательно в нуле.
А есть ещё Метод Ньютона для оптимизации. Когда говорят о МН в контексте оптимизации — имеют в виду его. Я сам, учась в институте, спутал по глупости эти методы и не мог понять фразу «Метод Ньютона имеет недостаток — необходимость считать вторые производные».
Рассмотрим для
Принимаем , т.е. целевая функция совпадает с заданной.
Разлагаем в ряд Тейлора, только в отличии от МНС нам нужно квадратичное приближение:
Несложно показать, что если , то функция не может иметь экстремум в
. Точка
называется стационарной.
Продифференцируем обе части по . Наша цель, чтобы
, поэтому решаем уравнение:
— это направление экстремума, но оно может быть как максимумом, так и минимумом. Чтобы узнать — является ли точка
минимумом — нужно проанализировать вторую производную. Если
является локальным минимумом, если
— максимумом.
В многомерном случае первая производная заменяется на градиент, вторая — на матрицу Гессе. Делить матрицы нельзя, вместо этого умножают на обратную(соблюдая сторону, т.к. коммутативность отсутствует):
Аналогично одномерному случаю — нужно проверить, правильно ли мы идём? Если матрица Гессе положительно определена, значит направление верное, иначе используем МНС.
В коде:
def is_pos_def(x): return np.all(np.linalg.eigvals(x) > 0) class NewtonOptimizer(Optimizer): def next_point(self): hesse = self.hesse(self.x) # if Hessian matrix if positive - Ok, otherwise we are going in wrong direction, changing to gradient descent if is_pos_def(hesse): hesseInverse = np.linalg.inv(hesse) nextX = self.x - self.learningRate * np.dot(hesseInverse, self.gradient(self.x)) else: nextX = self.x - self.learningRate * self.gradient(self.x) return self.move_next(nextX)
Результат:

| Итерация | X | Y | Z |
|---|---|---|---|
| 25 | -1.49 | 0.63 | 4.36 |
| 75 | 0.31 | -0.04 | 0.244 |
| 179 | 0.995 | -0.991 |
Сравните с МНС. Там был очень сильный спуск до 25 итерации( практически упали с горы), но потом сходимость сильно замедлилась. В МН, напротив, мы сначала медленно спускаемся с горы, но затем движемся быстрее. У МНС ушло с 25 по 532 итерацию, чтобы дойти до нуля с . МН же оптимизировал
за 154 последних итераций.
Это частое поведение: МН обладает квадратичной скоростью сходимости, если начинать с точки, близкой к локальному экстремуму. МНС же хорошо работает далеко от экстремума.
МН использует информацию кривизны, что было видно на рисунке выше(плавный спуск с горки).
Ещё пример, демонстрирующий эту идею: на рисунке ниже красный вектор — это направление МНС, а зелёный — МН

[Нелинейный vs линейный] метод наименьших квадратов
В МНК у нас есть модель , имеющая
параметров, которые настраиваются так, чтобы минимизировать
, где —
-е наблюдение.
В линейном МНК у нас есть $m$ уравнений, каждое из которых мы можем представить как линейное уравнение
Для линейного МНК решение единственно. Существуют мощные методы, такие как QR декомпозиция, SVD декомпозиция, способные найти решение для линейного МНК за 1 приближённое решение матричного уравнения .
В нелинейном МНК параметр может сам быть представлен функцией, например
. Так же, может быть произведение параметров, например
и т.д.
Здесь же приходится находить решение итеративно, причём решение зависит от выбора начальной точки.
Методы ниже имеют дело как раз с нелинейным случаем. Но, сперва, рассмотрим нелиненый МНК в контексте нашей задачи — минимизации функции
Ничего не напоминает? Это как раз форма МНК! Введём вектор-функцию
и будем подбирать так, чтобы решить систему уравнений(хотя бы приближённо):
Тогда нам нужна мера — насколько хороша наша аппроксимация. Вот она:
Я применил обратную операцию: подстроил вектор-функцию под целевую
. Но можно и наоборот: если дана вектор-функция
, строим
из (5). Например:
Напоследок, один очень важдный момент. Должно выполняться условие , иначе методом пользоваться нельзя. В нашем случае условие выполняется
Метод Гаусса-Ньютона
Метод основан на всё той же линейной аппроксимации, только теперь имеем дело с двумя функциями:
Далее делаем то же, что и в методе Ньютона — решаем уравнение(только для ):
Несложно показать, что вблизи :
Код оптимизатора:
class NewtonGaussOptimizer(Optimizer): def next_point(self): # Solve (J_t * J)d_ng = -J*f jacobi = self.jacobi(self.x) jacobisLeft = np.dot(jacobi.T, jacobi) jacobiLeftInverse = np.linalg.inv(jacobisLeft) jjj = np.dot(jacobiLeftInverse, jacobi.T) # (J_t * J)^-1 * J_t nextX = self.x - self.learningRate * np.dot(jjj, self.function_array(self.x)).reshape((-1)) return self.move_next(nextX)
Результат превысил мои ожидания. Всего за 3 итерации мы пришли в точку . Чтобы продемонстрировать траекторию движения я уменьшил learningrate до 0.2
Алгоритм Левенберга — Марквардта
Он основан на одной из версий Методе Гаусса-Ньютона( "damped version" ):
называется параметром регулизации. Иногда
заменяют на
для улучшения сходимости.
Диагональные элементы будут положительны, т.к. элемент
матрицы
является скалярным произведением вектора-строки
в
на самого себя.
Для больших получается метод наискорейшего спуска, для маленьких — метод Ньютона.
Сам алгоритм в процессе оптимизации подбирает нужный на основе gain ratio, определяющийся как:
Если , то
— хорошая аппроксимация для
, иначе — нужно увеличить
.
Начальное значение задаётся как
, где
— элементы матрицы
.
рекомендовано назначать за
. Критерием остановки является достижение глобального минимуму, т.е.
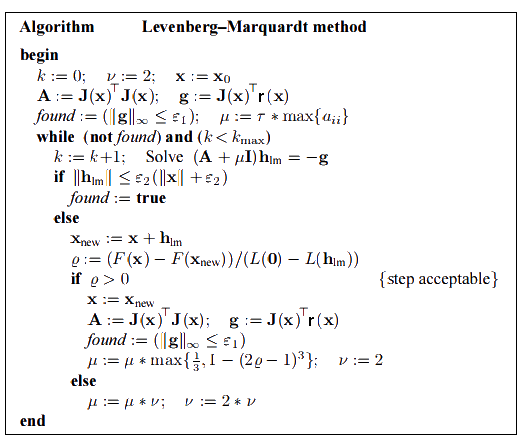
В оптимизаторах я не реализовывал критерий остановки — за это отвечает пользователь. Мне нужно было только движение к следующей точке.
class LevenbergMarquardtOptimizer(Optimizer): def __init__(self, function, initialPoint, gradient=None, jacobi=None, hessian=None, interval=None, function_array=None, learningRate=1): self.learningRate = learningRate functionNew = lambda x: np.array([function(x)]) super().__init__(functionNew, initialPoint, gradient, jacobi, hessian, interval, function_array=function_array) self.v = 2 self.alpha = 1e-3 self.m = self.alpha * np.max(self.getA(jacobi(initialPoint))) def getA(self, jacobi): return np.dot(jacobi.T, jacobi) def getF(self, d): function = self.function_array(d) return 0.5 * np.dot(function.T, function) def next_point(self): if self.y==0: # finished. Y can't be less than zero return self.x, self.y jacobi = self.jacobi(self.x) A = self.getA(jacobi) g = np.dot(jacobi.T, self.function_array(self.x)).reshape((-1, 1)) leftPartInverse = np.linalg.inv(A + self.m * np.eye(A.shape[0], A.shape[1])) d_lm = - np.dot(leftPartInverse, g) # moving direction x_new = self.x + self.learningRate * d_lm.reshape((-1)) # line search grain_numerator = (self.getF(self.x) - self.getF(x_new)) gain_divisor = 0.5* np.dot(d_lm.T, self.m*d_lm-g) + 1e-10 gain = grain_numerator / gain_divisor if gain > 0: # it's a good function approximation. self.move_next(x_new) # ok, step acceptable self.m = self.m * max(1 / 3, 1 - (2 * gain - 1) ** 3) self.v = 2 else: self.m *= self.v self.v *= 2 return self.x, self.y
Результат получился тоже хороший:
| Итерация | X | Y | Z |
|---|---|---|---|
| 0 | -2 | -2 | 22.5 |
| 4 | 0.999 | 0.998 | |
| 11 | 1 | 1 | 0 |
При learningrate =0.2:
Сравнение методов
| Название метода | Целевая функция | Достоинства | Недостатки | Сходимость |
|---|---|---|---|---|
| Метод наискорейший спуск | дифференцируемая | -широкий круг применения -простая реализация -низкая цена одной итерации |
-глобальный минимум ищется хуже, чем в остальных методах -низкая скорость сходимости вблизи экстремума |
локальная |
| Метод Нютона | дважды дифференцируемая | -высокая скорость сходимости вблизи экстремума -использует информацию о кривизне |
-функция должны быть дважды дифференцируема -вернёт ошибку, если матрица Гессе вырождена ( не имеет обратной) -есть шанс уйти не туда, если находится далеко от экстремума |
локальная |
| Метод Гаусса-Нютона | нелинейный МНК | -очень высокая скорость сходимости -хорошо работает с задачей curve-fitting |
-колонки матрицы J должны быть линейно-независимы -налагает ограничения на вид целевой функции |
локальная |
| Алгоритм Левенберга — Марквардта | нелинейный МНК | -наибольная устойчивость среди рассмотренных методов -наибольшие шансы найти глобальный экстремум -очень высокая скорость сходимости(адаптивная) -хорошо работает с задачей curve-fitting |
-колонки матрицы J должны быть линейно-независимы -налагает ограничения на вид целевой функции -сложность в реализации |
локальная |
Несмотря на хорошие результаты в конкретном примере рассмотренные методы не гарантируют глобальную сходимость(найти которую — крайне трудная задача). Примером из немногих методов, позволяющих всё же достичь этого, является алгоритм basin-hopping
Совмещённый результат(специально понижена скорость последних двух методов):
Исходники можно скачать с github
Источники
- K. Madsen, H.B. Nielsen, O. Tingleff(2004): Methods for non-linear least square
- Florent Brunet(2011): Basics on Continuous Optimization
- Least Squares Problems
