Предисловие
Не так давно пришлось поработать с упрощением полигональной цепи (процесс, позволяющий уменьшить число точек полилинии). В целом, данный тип задач очень распространен при обработке векторной графики и при построении карт. В качестве примера можно взять цепь, несколько точек которой попадают в один и тот же пиксель – очевидно, что все эти точки можно упростить в одну. Некоторое время назад я практически ничего не знал об этом от слова «совсем», в связи с чем, пришлось в быстром темпе восполнять необходимый багаж знаний по этой теме. Но каково было мое удивление, когда в интернете я не нашел достаточно полных руководств по этому вопросу… Мне приходилось отрывками искать информацию с совершенно разных источников и, после проведенного анализа, выстраивать все в общую картину. Занятие не из самых приятных, если честно. Поэтому мне хотелось бы написать цикл статей, посвященных алгоритмам упрощения полигональной цепи. Как раз-таки начать я решил с наиболее популярного алгоритма Дугласа-Пекера.

Описание
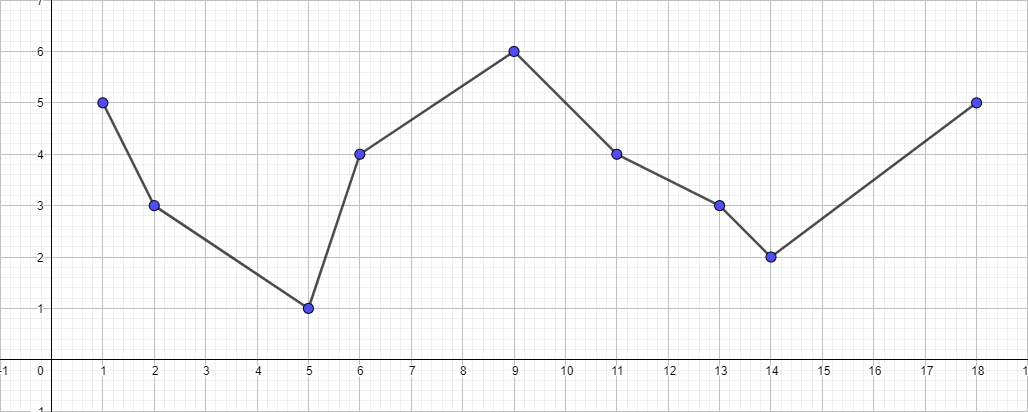
Алгоритму задается исходная полилиния и максимальное расстояние (ε), которое может быть между исходной и упрощенной полилиниями (то есть, максимальное расстояние от точек исходной к ближайшему участку полученной полилинии). Алгоритм рекурсивно делит полилинию. Входом алгоритма служат координаты всех точек между первой и последней, включая их, а также значение ε. Первая и последняя точка сохраняются неизменными. После чего алгоритм находит точку, наиболее удаленную от отрезка, состоящего из первой и последней (алгоритм поиска расстояние от точки до отрезка). Если точка находится на расстоянии меньшем, чем ε, то все точки, которые еще не были отмечены к сохранению, могут быть выброшены из набора, и получившаяся прямая сглаживает кривую с точностью не ниже ε. Если же это расстояние больше ε, то алгоритм рекурсивно вызывает себя на наборе от начальной точки до данной и от данной до конечных точек. Стоит отметить, что алгоритм Дугласа-Пекера в ходе своей работы не сохраняет топологию. Это означает, что в результате мы можем получить линию с самопересечениями. В качестве наглядного примера возьмем полилинию со следующим набором точек: [ { 1; 5 }, { 2; 3 }, { 5; 1 }, { 6; 4 }, { 9; 6 }, { 11; 4 }, { 13; 3 }, { 14; 2 }, { 18; 5 } ] и посмотрим на процесс упрощения при разных значениях ε:
Исходная полилиния из представленного набора точек:
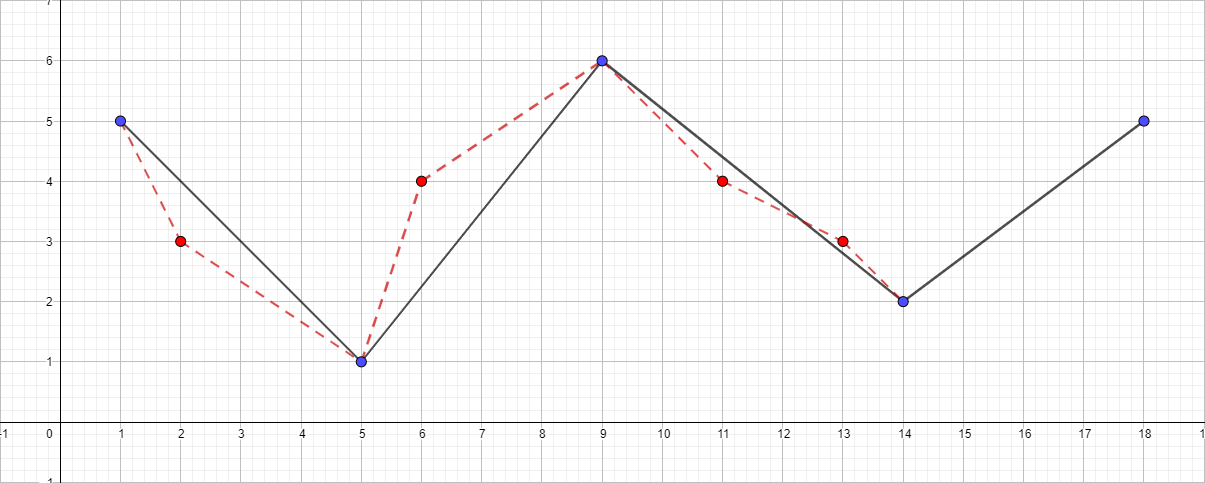
Полилиния с ε равной 0.5:

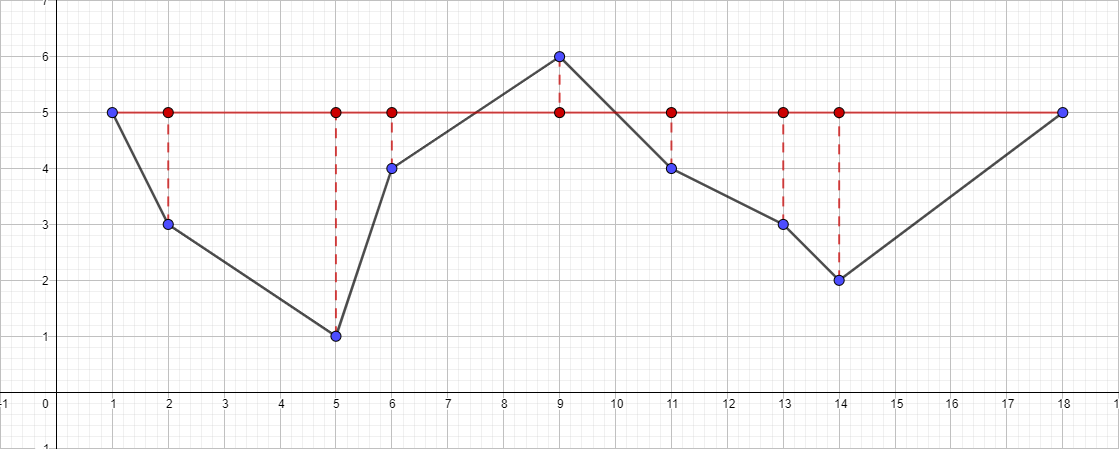
Полилиния с ε равной 1:

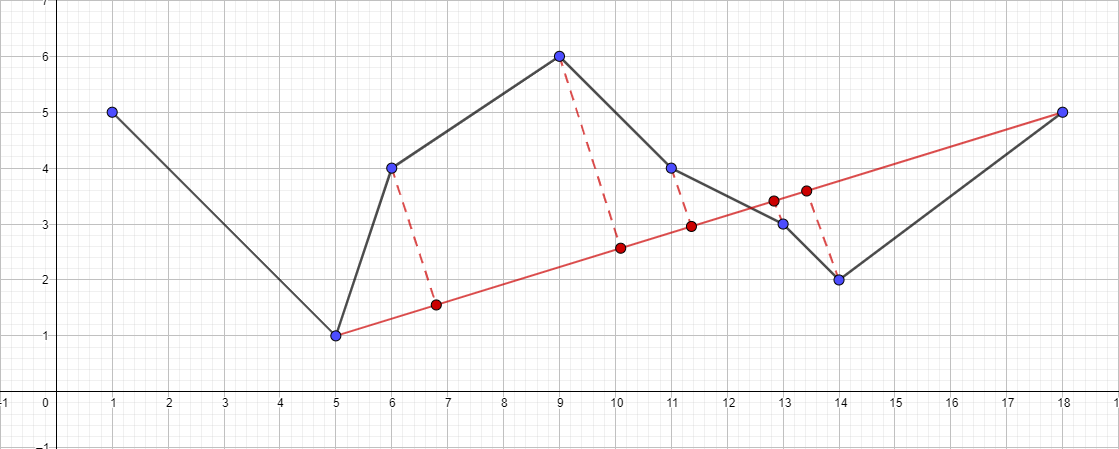
Полилиния с ε равной 1.5:
Можно и дальше продолжить увеличение максимального расстояния и визуализацию алгоритма, но, думаю, основная суть после этих примеров стала понятной.
Реализация
В качестве языка программирования для реализации алгоритма был выбран С++, полный исходный код алгоритма вы можете увидеть здесь. А теперь непосредственно к самой реализации:
#define X_COORDINATE 0 #define Y_COORDINATE 1 template<typename T> using point_t = std::pair<T, T>; template<typename T> using line_segment_t = std::pair<point_t<T>, point_t<T>>; template<typename T> using points_t = std::vector<point_t<T>>; template<typename CoordinateType> double get_distance_between_point_and_line_segment(const line_segment_t<CoordinateType>& line_segment, const point_t<CoordinateType>& point) noexcept { const CoordinateType x = std::get<X_COORDINATE>(point); const CoordinateType y = std::get<Y_COORDINATE>(point); const CoordinateType x1 = std::get<X_COORDINATE>(line_segment.first); const CoordinateType y1 = std::get<Y_COORDINATE>(line_segment.first); const CoordinateType x2 = std::get<X_COORDINATE>(line_segment.second); const CoordinateType y2 = std::get<Y_COORDINATE>(line_segment.second); const double double_area = abs((y2-y1)*x - (x2-x1)*y + x2*y1 - y2*x1); const double line_segment_length = sqrt(pow((x2-x1), 2) + pow((y2-y1), 2)); if (line_segment_length != 0.0) return double_area / line_segment_length; else return 0.0; } template<typename CoordinateType> void simplify_points(const points_t<CoordinateType>& src_points, points_t<CoordinateType>& dest_points, double tolerance, std::size_t begin, std::size_t end) { if (begin + 1 == end) return; double max_distance = -1.0; std::size_t max_index = 0; for (std::size_t i = begin + 1; i < end; i++) { const point_t<CoordinateType>& cur_point = src_points.at(i); const point_t<CoordinateType>& start_point = src_points.at(begin); const point_t<CoordinateType>& end_point = src_points.at(end); const double distance = get_distance_between_point_and_line_segment({ start_point, end_point }, cur_point); if (distance > max_distance) { max_distance = distance; max_index = i; } } if (max_distance > tolerance) { simplify_points(src_points, dest_points, tolerance, begin, max_index); dest_points.push_back(src_points.at(max_index)); simplify_points(src_points, dest_points, tolerance, max_index, end); } } template< typename CoordinateType, typename = std::enable_if<std::is_integral<CoordinateType>::value || std::is_floating_point<CoordinateType>::value>::type> points_t<CoordinateType> duglas_peucker(const points_t<CoordinateType>& src_points, double tolerance) noexcept { if (tolerance <= 0) return src_points; points_t<CoordinateType> dest_points{}; dest_points.push_back(src_points.front()); simplify_points(src_points, dest_points, tolerance, 0, src_points.size() - 1); dest_points.push_back(src_points.back()); return dest_points; }
Ну и собственно само использование алгоритма:
int main() { points_t<int> source_points{ { 1, 5 }, { 2, 3 }, { 5, 1 }, { 6, 4 }, { 9, 6 }, { 11, 4 }, { 13, 3 }, { 14, 2 }, { 18, 5 } }; points_t<int> simplify_points = duglas_peucker(source_points, 1); return EXIT_SUCCESS; }
Пример выполнения алгоритма
В качестве входных данных возьмем раннее известный нам набор точек [ { 1; 5 }, { 2; 3 }, { 5; 1 }, { 6; 4 }, { 9; 6 }, { 11; 4 }, { 13; 3 }, { 14; 2 }, { 18; 5 } ] и ε равной 1:
- Найдем наиболее удаленную точку от отрезка { 1; 5 } — { 18; 5 }, данной точкой окажется точка { 5; 1 }.
- Проверяем ее расстояние до отрезка { 1; 5 } — { 18; 5 }. Оно оказывается больше 1, значит добавляем ее в результирующую полилинию.
- Запускаем рекурсивно алгоритм для отрезка { 1; 5 } — { 5; 1 } и находим наиболее удаленную точку для этого отрезка. Данная точка — это { 2; 3 }.

- Проверяем ее расстояние до отрезка { 1; 5 } — { 5; 1 }. В данном случае оно меньше 1, значит мы можем спокойно отбросить эту точку.
- Запускаем рекурсивно алгоритм для отрезка { 5; 1 } — { 18; 5 } и находим наиболее удаленную точку для этого отрезка…
- И так далее по такому же плану...
В результате дерево рекурсивных вызовов для этих тестовых данных будет выглядеть следующим образом:

Время работы
Ожидаемая сложность алгоритма в лучшем случае составляет О(nlogn), это когда номер наиболее удаленной точки всегда оказывается лексикографически центральным. Однако, в худшем случае сложность алгоритма составляет O(n^2). Это достигается, например, в случае, если номер наиболее удаленной точки всегда соседний к номеру граничной точки.
Надеюсь что моя статья окажется кому то полезной, также хотел бы заострить внимание на том, что если статья проявит достаточный интерес среди читателей, то в скором времени буду готов рассмотреть алгоритмы упрощения полигональной цепи Реуммана-Виткама, Опхейма и Ланга. Спасибо за внимание!
