Ультразвуковой GPS. Концептуальная модель
Перед тем как отправляться в столь долгое плавание стоит проверить, а так ли все реально сделать на коленке.
О чем эта статья: как быстро и недорого сделать простую ультразвуковую GPS.
Список необходимых устройств
- HC-SR04 3 шт.
- Arduino 1 шт.
- Моток проводов.
Концепция
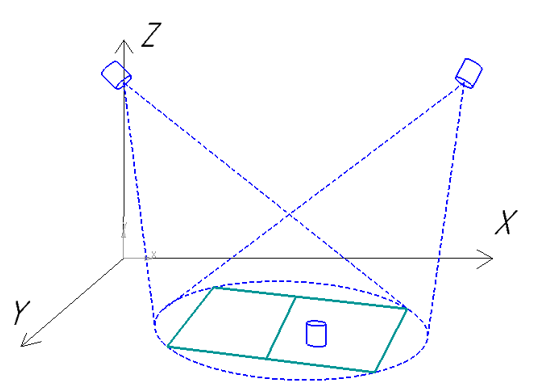
Рис. 1 – Общая идея устройства
По верхним углам комнаты установлены HC-SR04, которые играют роль излучателей, на полу приемником вверх лежит третий, он у нас играет роль приемника.
Все это соединено по схеме:
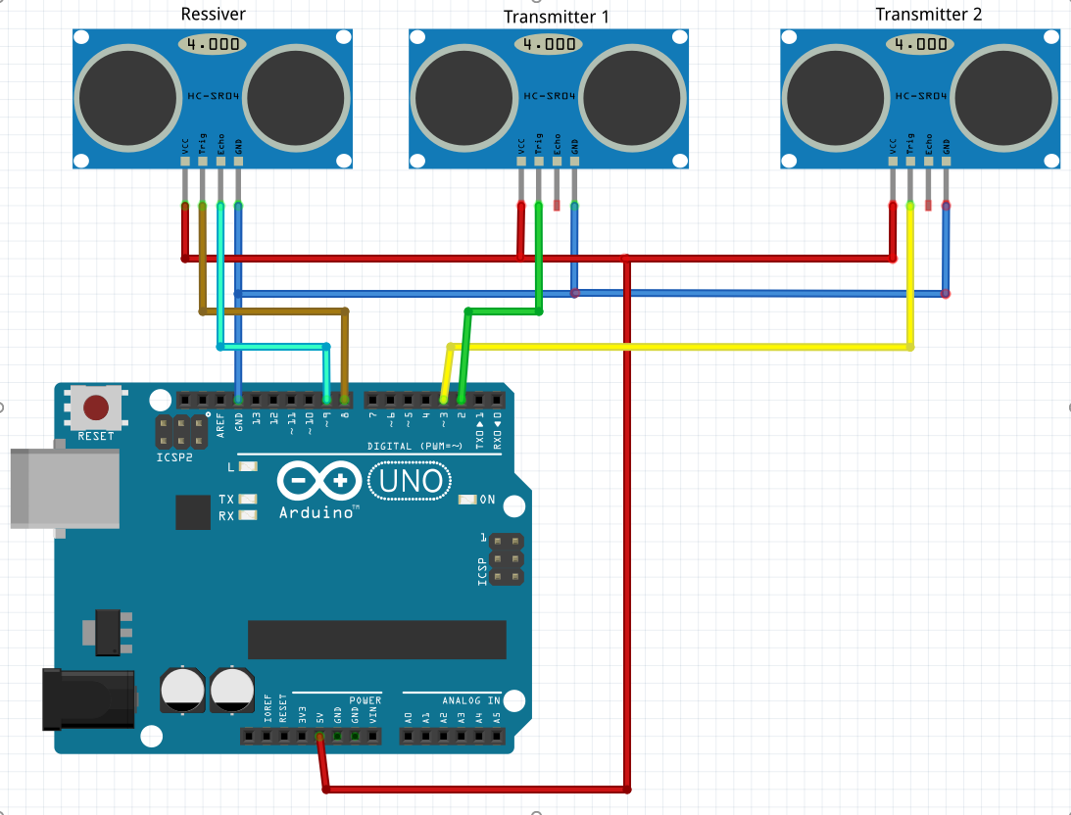
Рис. 2 – Схема подключения устройств
И конечно же вы подключаете Arduino по USB к компьютеру.
Как это все работает:
- Измерить расстояние от приемника до излучателя 1
- Послать сигнал о начале измерения расстояния приемнику и излучателю 1 (дернуть им лапки Trig).
- Подождать пока приемник нам не выдаст длину.
- Повторить тоже самое для излучателя 2.
- Рассчитать координаты приемника.
Вспомним школьную геометрию

Рис. 3 – Геометрическое представление задачи
На основании данного рисунка составим формулы расчета координат:

A, F – высота излучателей относительно приемника;
С, Е – длины, полученные при измерении расстояния от излучателей до приемника;
G – расстояние между излучателями.
Практика
Установите два излучателя под потолок, на приличном расстоянии друг от друга (3 метра самое то) направьте их излучателями в одну точку, вокруг которой и будет сформирована ваша рабочая область.
Закрепите приемник на чем-нибудь плоском (например, кусок доски) и замотайте ему излучатель скотчем, чтобы нам не создавал лишнего ультразвукового зашумления в комнате.
Соедините все по схеме представленной выше.
Примерно вот так могут выглядеть крепежи для излучателей и подложка для приемника:

Рис. 4 – Вид модулей
Программа
Рассмотрим ключевые части кода подробнее.
Заставляем излучатель 1 и приемник начать измерение расстояния переведя вход Trig данных устройств из низкого состояния в высокое, на 10 микросекунд и обратно в низкое.
digitalWrite(trigPinRessiv, LOW); digitalWrite(trigPinTransmit1, LOW); delayMicroseconds(5); digitalWrite(trigPinRessiv, HIGH); digitalWrite(trigPinTransmit1, HIGH); delayMicroseconds(10); digitalWrite(trigPinRessiv, LOW); digitalWrite(trigPinTransmit1, LOW);
Обычно данные устройства сами излучают УЗ сигнал и ждут пока он от чего то отразится, и придет обратно к ним. Но мы их обманываем, в нашем случае один посылает а другой получает, тот что получил думает что это его сигнал, хотя это сигнал другого устройства, и выдает нам расстояние до этого другого устройства.
Ждем пока датчик начнет нам сообщать длительность полета УЗ сигнала:
while (digitalRead(echoPinRessiv) == LOW);
Записываем время начала получения сигнала:
timeStartSignal = micros();
Ждем пока датчик не прекратит сообщать нам время пролета УЗ сигнала:
while (digitalRead(echoPinRessiv) == HIGH);
Записываем время окончания:
timeEndSignal = micros();
По нехитрой формуле вычисляем расстояние от излучателя до приемника:
lenC = ((timeEndSignal-timeStartSignal)/58.00)*10.00;
Ждем пока не затихнет в комнате УЗ шум:
delay(100);
Стоит отметить, что датчик сообщает нам расстояние при помощи опускания выхода Echo в Low на промежуток времени прямо пропорциональный измеренному расстоянию.
Тоже самое повторяем для второго излучателя.
При помощи правил о прямоугольном треугольнике проецируем полученное расстояние на плоскость пола (рис. 3).
Реализуем программно формулу перехода от трехмерных координат к плоскости, формула представлена выше:
lenB = sqrt((lenC*2.00)*(lenC*2.00) - lenA*lenA);
К сожалению, у нас возникают погрешности и для их удаления я вывел вот такую опытную формулу, удалите её и посмотрите, что у вас получится.
measurementError = 26.437 - 0.08*lenC/10; lenB = (lenB + measurementError*10)/10.00;
То же самое повторяем для датчика 2
Вычисляем координаты на плоскости
Находим угол Альфа:
alfa = acos(((lenG*lenG + lenD*lenD - lenB*lenB)*1.00) / ((2*lenE*lenG)*1.00));
Находим сами координаты:
koord_X = lenE*cos(1.57-alfa); koord_Y = lenE*cos(alfa);
Если значение координат выходит за пределы возможных то заменяем его предыдущим значением:
if((koord_X > 0) && (koord_X < 500) && (koord_Y > 0) && (koord_Y < 500)) { oldKoord_X = koord_X; oldKoord_Y = koord_Y; }else{ koord_X = oldKoord_X; koord_Y = oldKoord_Y; }
Делаем буфер для 6 значений координат и постоянно его сдвигаем:
koord_X5 = koord_X4; koord_X4 = koord_X3; koord_X3 = koord_X2; koord_X2 = koord_X1; koord_X1 = koord_X; koord_Y5 = koord_Y4; koord_Y4 = koord_Y3; koord_Y3 = koord_Y2; koord_Y2 = koord_Y1; koord_Y1 = koord_Y;
Получаем среднее значение по прошлым 6 измерениям:
averageKoord_X = (koord_X + koord_X1 + koord_X2 + koord_X3 + koord_X4 + koord_X5)/6; averageKoord_Y = (koord_Y + koord_Y1 + koord_Y2 + koord_Y3 + koord_Y4 + koord_Y5)/6;
Отправляем координаты на ПК:
Serial.println(averageKoord_X); Serial.println(averageKoord_Y);
Функции:
float asin(float c) float acos(float c) float atan(float c)
просто берем и используем =)
Весь код целиком:
int trigPinRessiv = 8; int echoPinRessiv = 9; int trigPinTransmit1 = 2; int trigPinTransmit2 = 3; int i; long lenA = 2700; //sensor height in mm long lenG = 305; // distance between sensors in cm long koord_X, koord_Y; long koord_X1, koord_Y1; long koord_X2, koord_Y2; long koord_X3, koord_Y3; long koord_X4, koord_Y4; long koord_X5, koord_Y5; long oldKoord_X = 0, oldKoord_Y = 0; long averageKoord_X, averageKoord_Y; long measurementError; float alfa; long timeStartSignal, timeEndSignal; long lenC, lenE, lenB, lenD; void setup() { Serial.begin (115200); pinMode(trigPinRessiv, OUTPUT); pinMode(echoPinRessiv, INPUT); pinMode(trigPinTransmit1, OUTPUT); pinMode(trigPinTransmit2, OUTPUT); } void loop() { averageKoord_X = 0; averageKoord_Y = 0; digitalWrite(trigPinRessiv, LOW); digitalWrite(trigPinTransmit1, LOW); delayMicroseconds(5); digitalWrite(trigPinRessiv, HIGH); digitalWrite(trigPinTransmit1, HIGH); delayMicroseconds(10); digitalWrite(trigPinRessiv, LOW); digitalWrite(trigPinTransmit1, LOW); while (digitalRead(echoPinRessiv) == LOW); timeStartSignal = micros(); while (digitalRead(echoPinRessiv) == HIGH); timeEndSignal = micros(); lenC = ((timeEndSignal-timeStartSignal)/58.00)*10.00; delay(100); digitalWrite(trigPinRessiv, LOW); digitalWrite(trigPinTransmit2, LOW); delayMicroseconds(5); digitalWrite(trigPinRessiv, HIGH); digitalWrite(trigPinTransmit2, HIGH); delayMicroseconds(10); digitalWrite(trigPinRessiv, LOW); digitalWrite(trigPinTransmit2, LOW); while (digitalRead(echoPinRessiv) == LOW); timeStartSignal = micros(); while (digitalRead(echoPinRessiv) == HIGH); timeEndSignal = micros(); lenE = ((timeEndSignal-timeStartSignal)/58.00)*10.00; delay(100); lenB = sqrt((lenC*2.00)*(lenC*2.00) - lenA*lenA); measurementError = 26.437 - 0.08*lenC/10; lenB = (lenB + measurementError*10)/10.00; lenD = sqrt((lenE*2.00)*(lenE*2.00) - lenA*lenA); measurementError = 26.437 - 0.08*lenD/10; lenD = (lenD + measurementError*10)/10.00; alfa = acos(((lenG*lenG + lenD*lenD - lenB*lenB)*1.00)/((2*lenE*lenG)*1.00)); koord_X = lenE*cos(1.57-alfa); koord_Y = lenE*cos(alfa); if((koord_X > 0) && (koord_X < 500) && (koord_Y > 0) && (koord_Y < 500)) { oldKoord_X = koord_X; oldKoord_Y = koord_Y; }else{ koord_X = oldKoord_X; koord_Y = oldKoord_Y; } koord_X5 = koord_X4; koord_X4 = koord_X3; koord_X3 = koord_X2; koord_X2 = koord_X1; koord_X1 = koord_X; koord_Y5 = koord_Y4; koord_Y4 = koord_Y3; koord_Y3 = koord_Y2; koord_Y2 = koord_Y1; koord_Y1 = koord_Y; averageKoord_X = (koord_X + koord_X1 + koord_X2 + koord_X3 + koord_X4 + koord_X5)/6; averageKoord_Y = (koord_Y + koord_Y1 + koord_Y2 + koord_Y3 + koord_Y4 + koord_Y5)/6; } float asin(float c) { float out; out = ((c+(pow(c,3))/6+(3*pow(c,5))/40+(5*pow(c,7))/112 +(35*pow(c,9))/1152 +(0.022*pow(c,11))+(0.0173*pow(c,13))+(0.0139*pow(c,15)) + (0.0115*pow(c,17))+(0.01*pow(c,19)))); if(c >= .96 && c < .97) { out=1.287+(3.82*(c-.96)); } if(c>=.97 && c<.98) { out=(1.325+4.5*(c-.97)); } if(c>=.98 && c<.99) { out=(1.37+6*(c-.98)); } if(c>=.99 && c<=1) { out=(1.43+14*(c-.99)); } return out; } float acos(float c) { float out; out=asin(sqrt(1-c*c)); return out; } float atan(float c) { float out; out=asin(c/(sqrt(1+c*c))); return out; }
Вот мы и получили простейшую ультразвуковую систему GPS с областью действия метр на метр, на видео показано как это все работает.
Визуализация траектории сделана в Matlab, как сделать такую же визуализацию напишу в следующей статье.
В дальнейших статьях я буду более углубленно рассматривать различные части данной системы и попытаюсь их улучшить.
Буду рад вашим мнениям и отзывам на данную тему, проект все ещё жив =)
Страничка проекта
Вдохновлялся следующими источниками:
Википедия
Пост на Хабре «Indoor «GPS» с точностью +-2см»
