Comments 59
Да. Про гироскутеры это точно
Если я правильно помню (а это совсем не точно), то термин "вентильный" использовался в сочетании "вентильный электропривод" и подразумевал управление с использованием полупроводниковых вентилей, например, ШИМ.
[1] А. С. Пушкин «Полтава».
Я не увидел, а где используется этот источник?
Конструкция статорных обмоток может быть распределенной или концентрированной. ЭДС определяет схема намотки и магнитная система мотора.
это схема намотки. также соединение обмоток бывает в виде звезды или треугольника. тоже относится к схеме
Более того. не меняя конструкцию двигателя, который изначально был сделан под распределенную обмотку (левая картинка) можно перемотать на концентрированную (правая картинка)
Википедия:
In electromagnetism and electronics, electromotive force (emf, and measured in volts) is the electrical action produced by a non-electrical source.
Для мотора имеется ввиду противо-эдс, создаваемая магнитной системой и скоростью вращения.
Я с практической стороны говорю, что разделять моторы по ЭДС глядя на то как намотаны витки — глупость.
Если говорить строго, то никогда ни чистой синусоиды ни чистой трапеции не будет, а будет некоторое приближение, либо к одному — либо к другому.
Имеющиеся способы управления двигателем исходят либо из синусоидальной (векторное), либо из трапецеидальной формы ЭДС (коммутация по ДПР). Потому и стремиться при проектировании двигателя надо к чему то одному.
А что касается картинки с обмотками, так смысл ее в том, что обычно синусоиде (точнее некоторому приближению к ней) соответствует распределённая обмотка, а трапеции (приближению к трапеции) сосредоточенная.
Вопрос о том к чему стремиться (к трапеции или синусу) надо решать на этапе проектирования двигателя с учетом желаемой точности электропривода.
Если просто надо крутиться, то достаточно коммутаций по ДПР и любой формы ЭДС.
Но если важна точность поддержания скорости или положения, то важна пульсация момента, а это напрямую связано с формой ЭДС и способом управления.
Индуктивность обмотки меняется при различных положениях ротора. Ваш вывод неправильный и только запутывает. Достаточно было просто закон Ампира произнести, по точности описания модели это было бы равносильно.
Связь момента и тока выводится наглядно из закона сохранения энергии.
Вы пренебрегаете потерями, при этом это основное что учитывается. Если бы их не было, то можно было управлять как хочешь. Именно потери ограничивают момент мотора(за счёт перегрева), а не то что мы на него не тот ток подали.
И управлять двигателем надо не " как хочешь" — а как надо.
Очевидно Вы имели дело с двигателями с малым КПД и сложной ЭДС. Такое тоже встречается. Посмотрите публикацию: «Модельно ориентированное проектирование. Электропривод с бесколлекторным двигателем постоянного тока» — думаю Вам это будет близко. В этой статье все учитывается: и потери в стали, и зубцовый момент и непойми какая форма ЭДС… Но это двигатели не для точного электропривода.
Задачи прецизионного позиционирования где используются безредукторные привода?
Насколько я понял, такой стоит в марсоходе, поэтому форма намотки это, не от адептов свободной энергии. maxon.
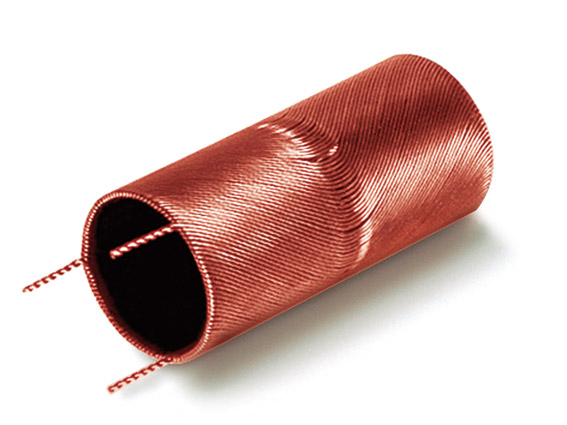
Ключевые слова: ironless, frameless, slotless motor
Вот более наглядная картинка подобных обмоток. Их главная фишка в отсутствии железа, которое необходимо перемагничивать (что добавляет потери и ухудшает частотные характеристики). При этом перекрытие обмоток можно делать различным, что, как я понимаю, в совокупностью с расположением магнитов и повлияет на форму ЭДС.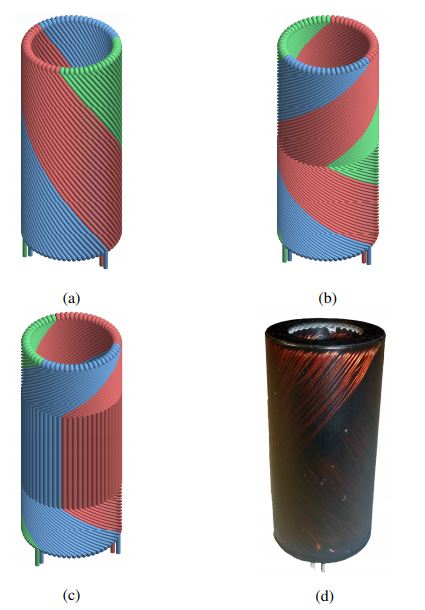
Ну что частотные характеристики лучше и нет порога насыщения сердечника, это-то понятно, а вот насколько падает мощность на кг для таких двигателей, почему они так мало распротранены?
Если говорить строго, то никогда ни чистой синусоиды ни чистой трапеции не будет, а будет некоторое приближение, либо к одному — либо к другому.
Имеющиеся способы управления двигателем исходят либо из синусоидальной (векторное), либо из трапецеидальной формы ЭДС (коммутация по ДПР). Потому, с точки зрения управления, стремиться при проектировании двигателя надо к чему то одному.
А что касается картинки с обмотками, так смысл ее в том, что обычно синусоиде (точнее некоторому приближению к ней) соответствует распределённая обмотка, а трапеции (приближению к трапеции) сосредоточенная.
Вопрос о том к чему стремиться (к трапеции или синусу) надо решать на этапе проектирования двигателя с учетом желаемой точности электропривода.
Если просто надо крутиться, то достаточно коммутаций по ДПР и любой формы ЭДС.
Но если важна точность поддержания скорости или положения, то важна пульсация момента, а это напрямую связано с формой ЭДС и способом управления.
Со времени публикации прошло довольно много времени. С тех пор пообщался со многими людьми- и практиками, и теоретиками. Народ со мной согласен.
По результатам замечаний сделал текс более аккуратным. Всем спасибо. Есть еще одна неточность у меня, когда я пишу о нарушениях математики для трапецеидальной ЭДС при векторном регулировании. С математикой все нормально, если симметрия не нарушается, но пульсации момента таки будут (не будет их при синусе).
И еще о терминах ...
Хочу замахнуться на святое – на термин «Частотно регулируемый электропривод».
Данным названием объединяют электропривода переменного тока осуществляющие регулирование момента, скорости, или положения.
Возникновение термина связано с тем, что исторически это регулирование осуществлялось устройствами называемыми «преобразователи частоты», которые связно меняли частоту и амплитуду управляющего напряжения. Такой способ управления называется скалярным. Его математической основой являются уравнения описывающие двигатели в статике.
Однако в определенный момент появился новый принцип управления, который назвали векторным. Его математическая основа, дифференциальные уравнения, которые корректно описывают поведение двигателя и в динамике и в статике. Собственно статика, это частный случай динамики.
Основное отличие векторного управления от скалярного (на мой взгляд) состоит в том, что управление осуществляется не амплитудой и частотой управляющего сигнала, а его амплитудой и мгновенной фазой.
Для примера ниже приведена осциллограмма токов фаз при скачке задания векторно-управляемого по скорости синхронного двигателя.

Скачек фазы в момент изменения задания прослеживается достаточно четко. После отработки задания схема переходит в установившийся режим.
Называть векторный электропривод «частотно регулируемым» - на мой взгляд неправильно, так как в нем регулируется не частота, а мгновенная фаза. В статике такое регулирование практически эквивалентно регулированию частоты, но по сути это постоянное регулирование мгновенной фазы.
В связи с этим, на мой взгляд, следует уточнить и понятие «Преобразователь частоты». В чистом виде его можно оставить для преобразующих устройств, например, превращающих 400Гц в 50Гц и т.д.
А в электроприводе – это не «преобразователь частоты», а «инвертор». При скалярном управлении инвертор управляет амплитудой и частотой, а при векторной – амплитудой и фазой.
Какие есть мнения?
Возможно ли по внешнему виду определить тип и устройство обмоток? Наши умельцы на просторах интернета начали разбирать электродвигатели электромобилей и гибридов, в частности Toyota Aqua, и мне как и многим непонятно устройство обмоток этого электродвигателя, возможно кто-то прольет свет по теме Aqua.

Хотел получить графики как на рисунке 6. Скачал архив с моделями. Запустил пакет БДПТ. Но почему-то не такие графики получаются. В чем может быть проблема?
Синхронные двигатели с постоянными магнитами на роторе: управление (синус и/или трапеция)