
Впервые в истории открытый проект Axiom даёт возможность точно управлять мощными 3-фазными двигателями. Сейчас это как никогда актуально. Миллиарды тратятся на приближение эры электромобилей. Виден огромный рост разработки электрокаров. И множество мелких и крупных компаний, конкурирующих за доминирующую роль в будущем транспорта занимаются этим.

Описание
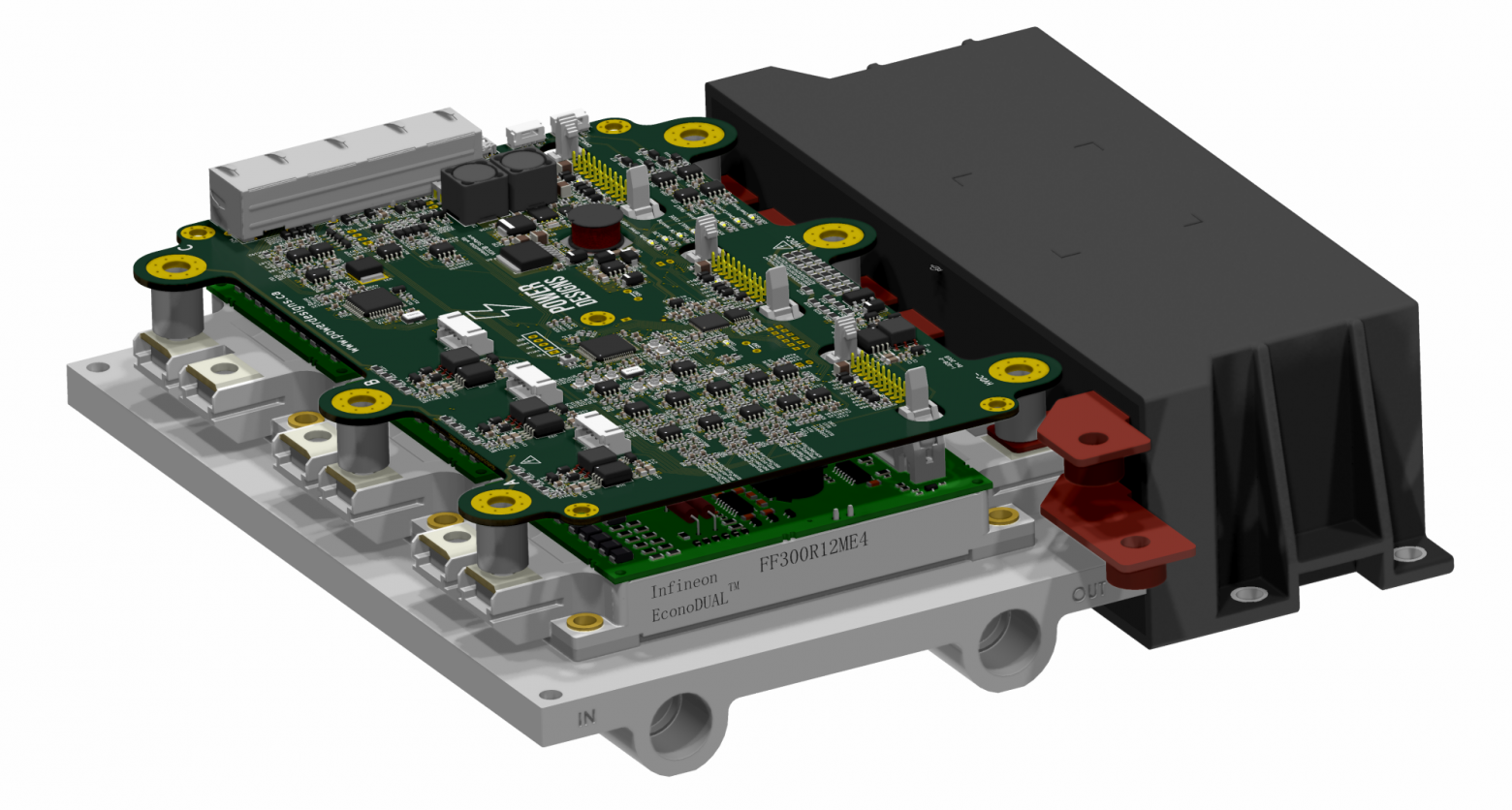
Это 3-фазный контроллер двигателя. На вход приходит напряжение постоянного тока и на выходе генерируется 3 синусоидальные волны для управления двигателем. Концептуально блок похож на небольшие ESC (регуляторы оборотов) для дронов и велосипедов. Разница в том, что этот блок может безопасно работать с батареей 400 В, которая может обеспечить 300 Ампер на выходе непрерывно.
Наша работа была сосредоточена на плате управления, которая способна выдавать напряжение более 400 В с током более 300 А, которые определяются номинальными значениями powerstage (силовой ступенью) или силовой частью блока, а также батареей.

Мы выбрали экономичные модули IGBT, потому что это более распространённые и легко покупаемые блоки. Они бывают разных уровней напряжения и тока (от 600 В до 1700 В и от 100 А до 1000 А), от многих брендов, как по технологии IGBT, так и по технологии SiC, а также с готовыми драйверами ключей, подобранными для них.
Идея проекта
Мы хотим участвовать в самых интересных, самых впечатляющих проектах, а другой открытой платформы, способной управлять двигателем 100 кВт нет. Все, что вы можете найти на рынке - это проприетарные контроллеры с высокой ценой, без возможности настроить их в соответствии с вашими потребностями. И, что наиболее важно, вы не сможете получить исходников, чтобы оценить, соответствует ли качество вашим стандартам, как в программном, так и в аппаратном обеспечении.
Новая волна компаний, производящих электромобили, была связана с кастомными электроприводами. Этот проект предоставляет возможность глубоко интегрировать электропривод в свои системы, даёт уникальную возможность адаптации под их требования. Это экономит затраты и улучшает качество их транспортных средств.
Открытый проект Axiom также демонстрирует качество нашей работы и делает нашу команду желанным подрядчиком. В мире не так много людей, обладающих набором навыков и знаний для производства инверторов с таким КПД.
Axiom также стал возможным благодаря тому, что платформа VESC неуклонно растет. Мы впервые можем вывести ее на новый уровень, от инструмента для хобби до полноценной технологии, способной поддерживать электромобили.
Для кого это?
С тех пор, как мы стали публичными, некоторые отдельные люди и целые инженерные группы по всему миру зарегистрировались для заказа Axiom. В настоящее время мы находимся на стадии бета-тестирования, поставляя продукт только наиболее опытным инженерным командам, способным предоставить нам ценную обратную связь, чтобы убедиться, что мы поставляем надежный продукт. Было обработано более сотни прямых запросов, вот некоторые из команд, у которых тестируется контроллер Axiom:

Примерно половина приложений предназначена для тяговых транспортных средств (автомобили, велосипеды, гоночные болиды), другие - для самолетов, а некоторые являются чисто научно-исследовательскими подразделениями.
Для чего подходит блок?
Практически для всего, что связано с мощными 3-фазными двигателями:
Переоборудование электромобилей
Гонки на электромобилях
Добыча полезных ископаемых
OEM EV, такие как велосипеды и квадроциклы
Подводные роверы
Авиационные системы
Пусковые установки планера
Ветряные генераторы
Исследования и разработки
Почему AXIOM?
Многие знакомы и уже используют системы VESC. Система обладает достаточно приличным уровнем. Пользователю необходим интерфейс для настройки своего проекта. И через VESC это делать очень удобно. Порог вхождения в эту систему очень низкий. Можно выразить уважение системе VESC Бенджамина:

Даже при наличии программного обеспечения и встроенного ПО, для приложения с высокой мощностью всё равно потребуется очень специфическое оборудование:
Преимущества контроллера:
Механически оптимизирован для установки на EconoDual IGBT-модули. Достаточно компактный, меньше этапов сборки, меньше проводов и обжима, нет переходных частей. Всё собирается единым блоком.
На плате встроен изолированный высоковольтный DC/DC преобразователь и монитор фазы. Прямое подключение к IGBT для лучшего Signal Integrity и более быстрой сборки.
На плате установлены резисторы разряда конденсаторов. Требование безопасности, по которому резисторы разряжают конденсаторы когда плата не питается.
Высокочастотные разъемы для измерения аналоговых сигналов. Это обеспечивает качество сигналов и упрощает разработку.
Индивидуальный мониторинг неисправностей IGBT. Вы можете определить, какой конкретно IGBT неисправен.
Отдельные светодиоды неисправности для определения перенапряжения, перегрузки по току и перегрева.
Индивидуальный контроль температуры IGBT.
ПЛИС Lattice iCE40, использующая набор инструментов с открытым исходным кодом для синтеза и разработки HDL.
FPGA непрерывно контролирует все входные сигналы неисправности. При обнаружении какой-либо неисправности вся деятельность PWM прекращается.
FPGA контролирует PWM, генерируемый MCU. Отключает ШИМ при обнаружении ошибки или неисправности.
Мы внедряем этот потрясающий трюк с управлением двигателем в FPGA
Порты RJ45. Это не Ethernet, они обеспечивают экранированную проводку с витой парой стандартным способом.
Два аналоговых входа для управления.
Два изолированных интерфейса CANbus.
Поддержка абсолютного энкодера BiSS.
Поддержка энкодера Sin / Cos.
Имеет источник питания 15 В постоянного тока для драйверов силовых модулей. Имеет контроль этих напряжений.
2 выхода ЦАП с ВЧ разъемами для визуального контроля алгоритмов управления.
2 выхода открытый сток для управления небольшими нагрузками или реле, например, для насоса.
Больше предохранителей, TVS диодов, больше фильтрации электромагнитных помех.
Вот несколько изображений с высоким разрешением:





Старый прототип, который может продемонстрировать зазоры изоляции. В новых платах не удастся такого увидеть из-за толстой паяльной маски.

Бессенсорное управление скоростью двигателя с силовым каскадом на IGBT (жёлтый канал - исследуемая фаза, выводимая на канал ЦАП):
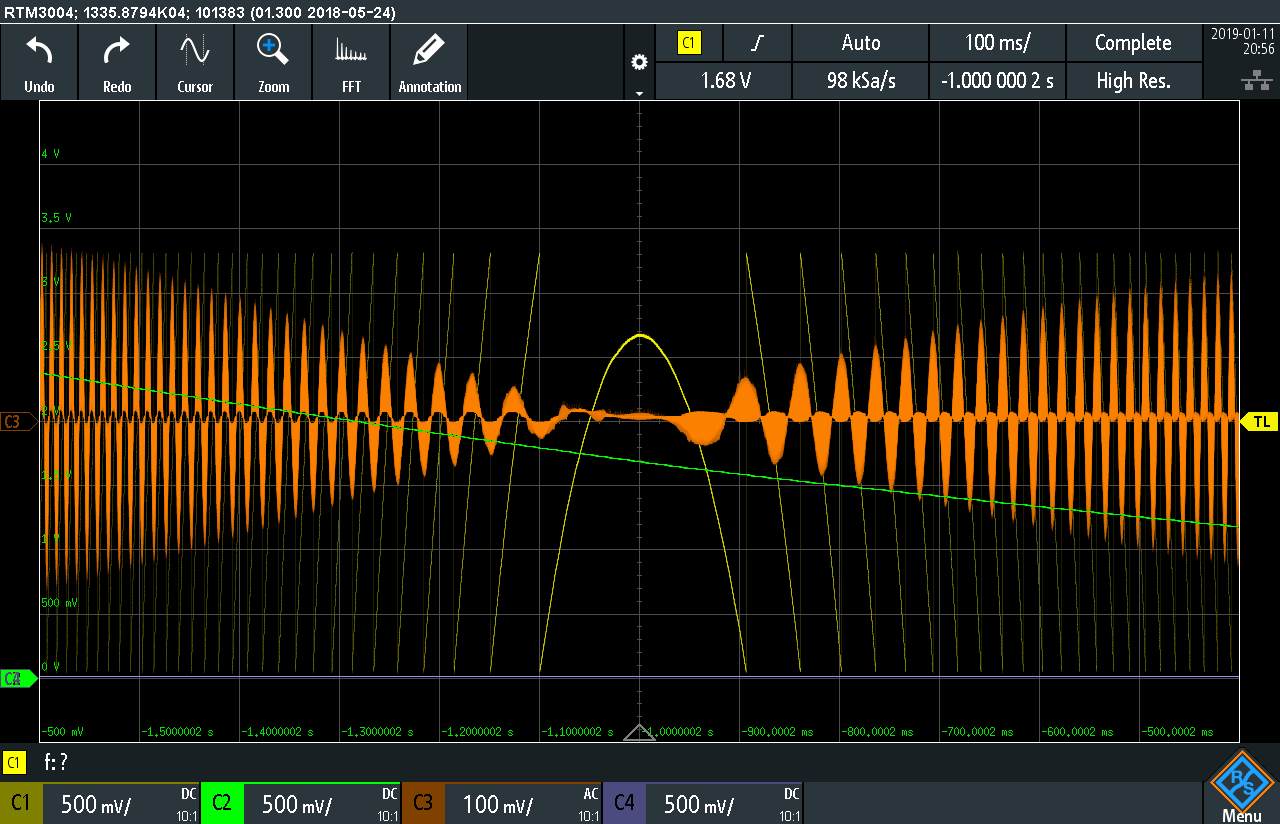
Много полных изменений скорости:
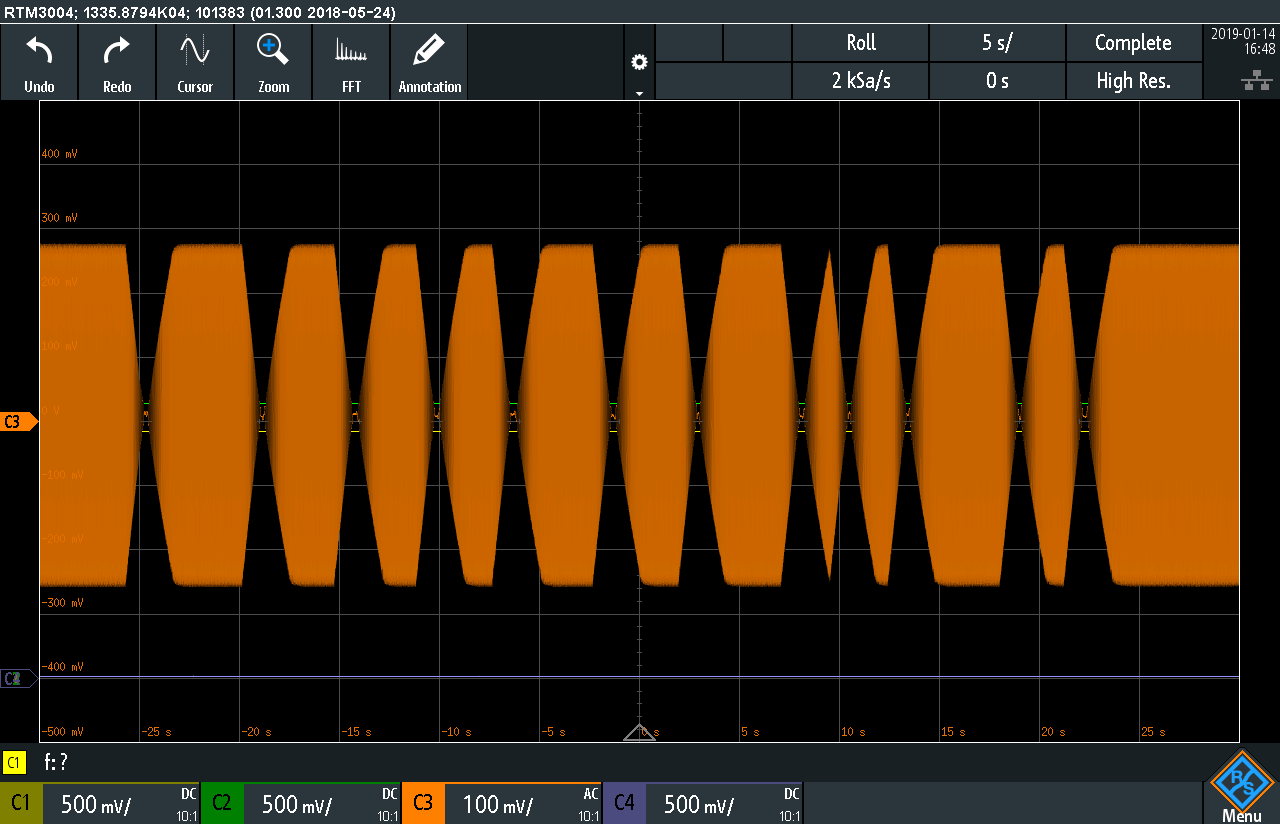
Это управление по сигналу на плате, на практике мы настоятельно рекомендуем использовать абсолютные датчики на силовых агрегатах.
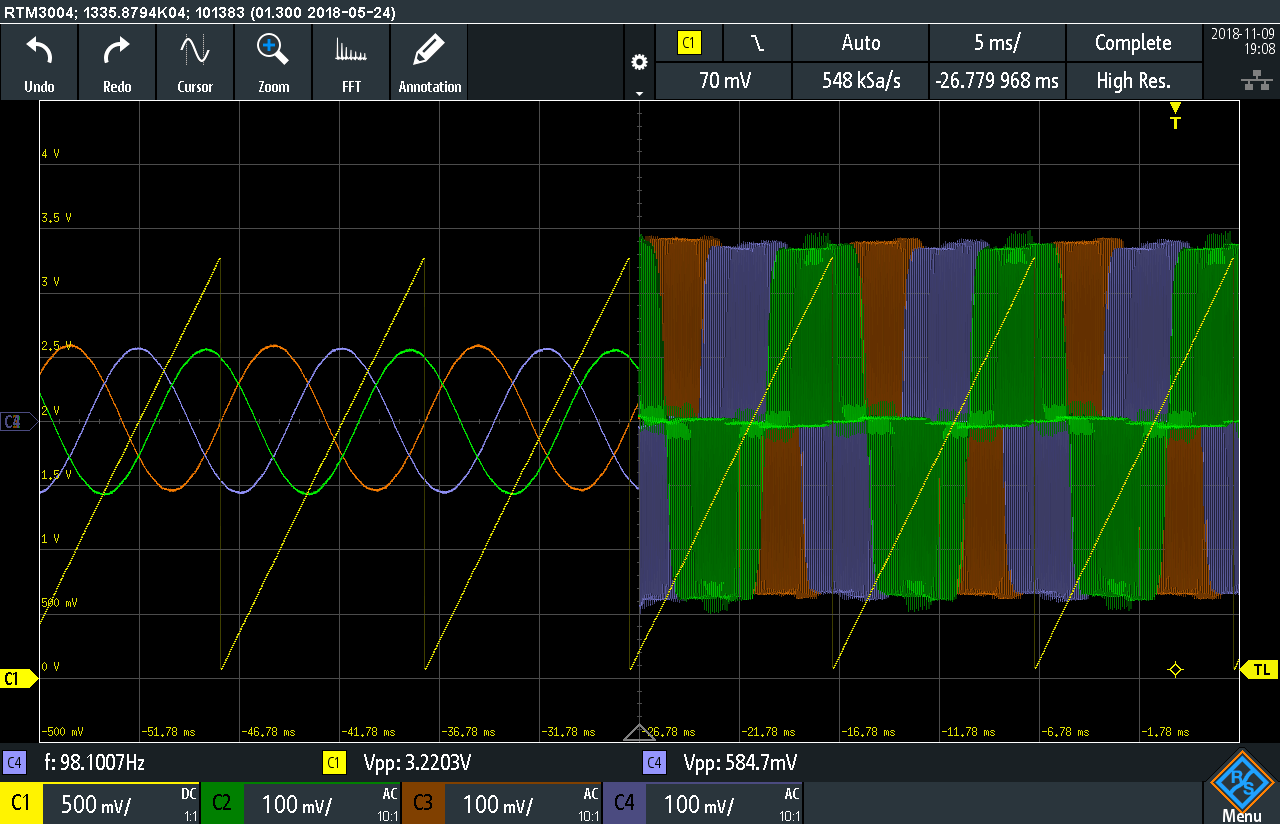
Идеально чистые сигналы, измеряемые прямо на выводах АЦП, передаваемые через ЦАП в осциллограф. Обратите внимание, как угол наклона вектора, идеально отслеживается при переходе без двигателя —> с управлением двигателем.
Четкое сообщение о неисправностях также присутствует в виде индикации на плате. Все индикаторы имеют подписи для удобства и скорости интерпретации события.

Схематический верхний уровень:

Спецификацию блока можно посмотреть в браузере.

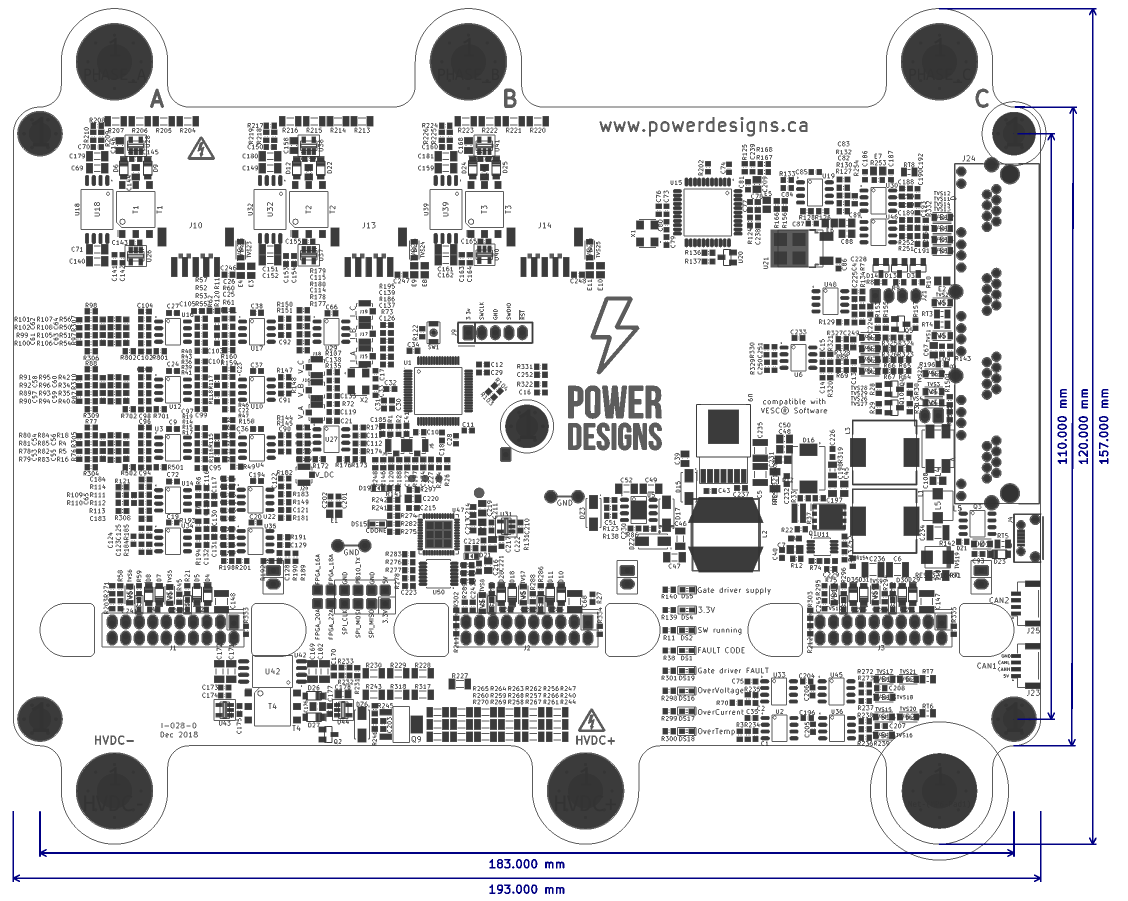
Дополнительные данные, техническое описание платы и изображения будут доступны по адресу: www.powerdesigns.ca , а также схематические и другие файлы дизайна.
Блок, изображённый на фотографиях рассчитан на непрерывную работу 400 В 300 А.
Как это работает?
На вход блоку подаётся напряжение источника питания (высокое напряжение постоянного тока) и с помощью PWM создается 3 синусоидальные волны со сдвигом 120° для управления двигателем. На самом деле, он использует модуляцию SVM, что уменьшает количество требуемых переключений и, следовательно, потери при переключении.
Несмотря на то, что VESC поддерживает приводные двигатели как в трапециевидном, так и в векторном управлении, наши платы работают только в режиме FOC (управление, ориентированное на поле). Он просто лучше подходит для применения.
FOC заключается в выравнивании синусоидальных волн с фактическим полем внутри двигателя и управлении им с помощью векторного сигнала, состоящего из тока, генерирующего крутящий момент, в квадратуре с потоком (Iq) и тока, генерирующего поток (Id). Есть много хороших ресурсов по этой теме, и вы можете увидеть фактические строки кода, выполняющие преобразования.
Тут есть описание истории проекта и перспективы развития, не очень относящиеся к техническим аспектам статьи.
Самая большая новость об этом проекте - официальная презентация команды, которая сделала это возможным. HighHopes и Arlo1 активно участвуют в разработке, мы вместе работали над выпуском этой платы управления, и мы основали www.powerdesigns.ca чтобы централизовать всю работу по проекту, которую мы выполняли вместе.
Arlo1 предоставляет опыт работы в полевых условиях благодаря своим потрясающим, рекордным сборкам и инструментам, в то время как HighHopes обеспечивает сложную математику для каждого проектного решения, в то время как Maxi и я делаем то, что у нас получается лучше всего: проектирование, САПР, прошивка и производство. И помните, что это результат многолетней разработки встроенного программного обеспечения Бенджамином Веддером, с которым мы уже сотрудничаем.
PowerDesigns должна предоставить собранные платы всем заинтересованным лицам. Мы можем предложить печатные платы без покрытия по запросу, но риск очень высок, и я не видел успешной сборки, когда людям приходится собирать платы самим. Поэтому лучше, если мы позаботимся о сборке. Еще лучше, если мы предоставим законченный контроллер двигателя, мы работаем над предоставлением такого решения.
Maxi (инженер-соучредитель paltatech) и я несколько месяцев назад переключились на разработку и тестирование прошивки, когда был решен дизайн аппаратного обеспечения. Весь код, который мы предоставляем для этих приложений, тщательно разработан для прямой интеграции в кодовую базу VESC, поэтому он остается общедоступным и поддерживается в хорошем состоянии.
С точки зрения аппаратного обеспечения у нас есть математика для точной настройки точек отключения, которые мы можем легко настроить по желанию, меняя резисторы, а FPGA является очень мощным дополнением для совместной обработки и функций безопасности.
Это потрясающая платформа для исследований и для мощных сборок, я не знаю ни одного контроллера с таким уровнем мощности, с таким качеством и вниманием к деталям, при этом пользователь может изменять прошивку по своему усмотрению.
Axiom еще не прошел квалификацию для авиационных / аэрокосмических применений.
А теперь можно посмотреть видео про этот проект.
Проект является открытым и все необходимые исходники его можно найти в интернете в открытом доступе.
https://github.com/vedderb/bldc
http://www.powerdesigns.ca/files/Datasheet-Axiom-control-board.pdf
https://endless-sphere.com/sphere/threads/axiom-a-100kw-motor-controller.89056/#p1458465
https://cdn.hackaday.io/files/1649327056450688/Axiom_Rev1_schematic.pdf
