Всем привет! Уже на следующих выходных 27-28 апреля состоится ежегодное масштабное мероприятие, посвященное Robot Operating System (ROS) - фреймворку, который предназначен для разработки программного обеспечения роботов. В него входит целый набор различных инструментов, библиотек и определённых правил, цель которых — создать единую и удобную среду.
ROS - это очень мощный пакет, который позволяет запрограммировать робота практически для любой цели, даже самой необычной! Сегодня мы познакомим Вас с такими примерами, которые точно не вписываются в рамки обыденного представления о применении робототехники. Давайте начнем!
Кстати, информация для тех, кто хочет посетить нашу ближайшую конференцию, которая состоится 27-28 апреля: можно посмотреть программу и зарегистрироваться.
Далее разберем доклады с прошлого мероприятия:
Дрон-художник на базе ROS: как мы поставили мировой рекорд по созданию мурала дроном
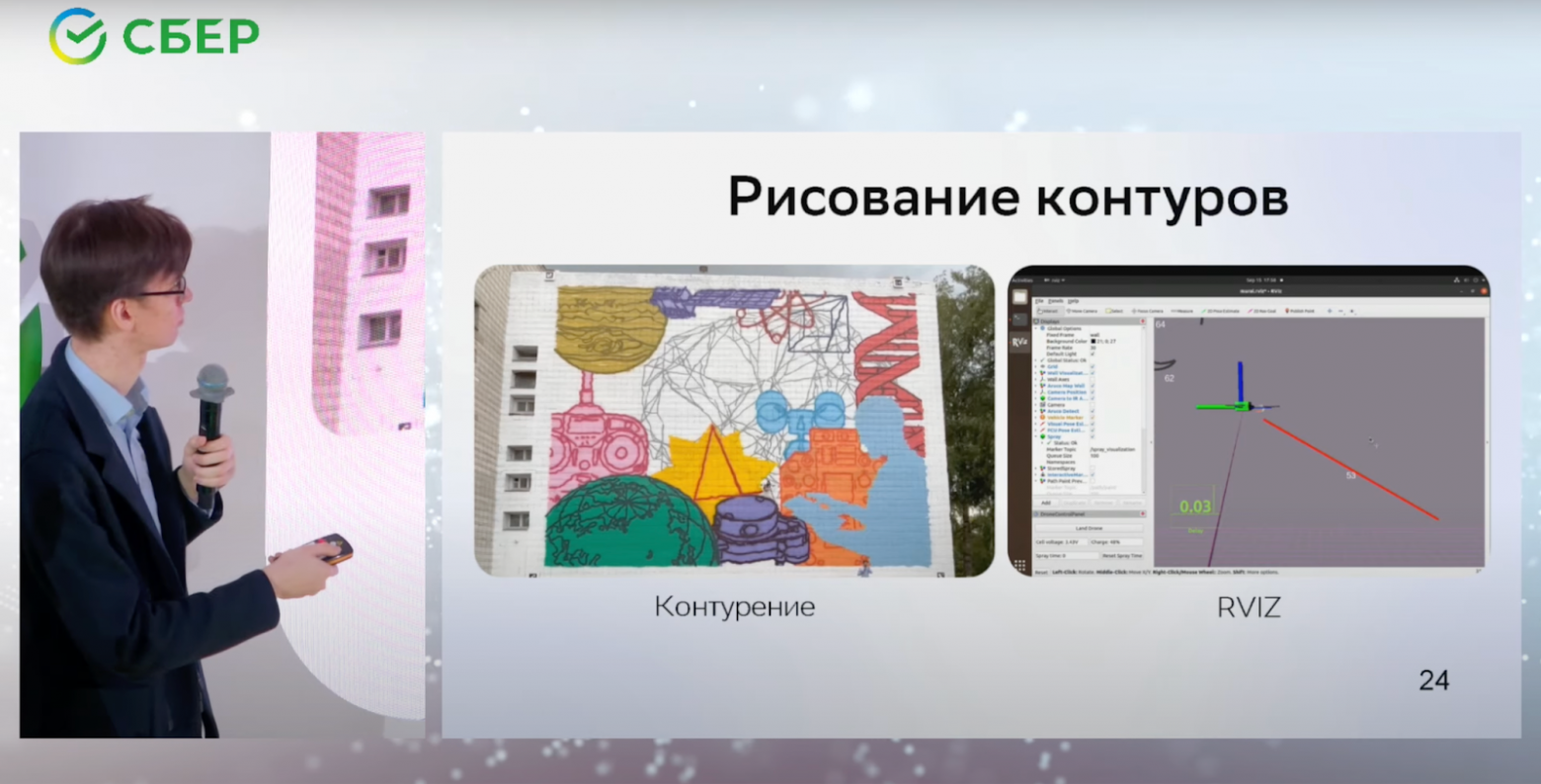
История о том, как команда компании АРТОМАТИКА создала самый большой в мире мурал, нарисованный дроном, используя для этого коптер, управляемый бортовым компьютером на базе ROS, и внешнюю систему позиционирования.
Сейчас идет процесс регистрации в книге рекордов РФ и ведут переговоры с "Гиннесом".
Спикеры: Коригодский Андрей, Васюник Артем, Бондарь Георгий.
Полевые испытания: как добиться результата и не потеряться в полях
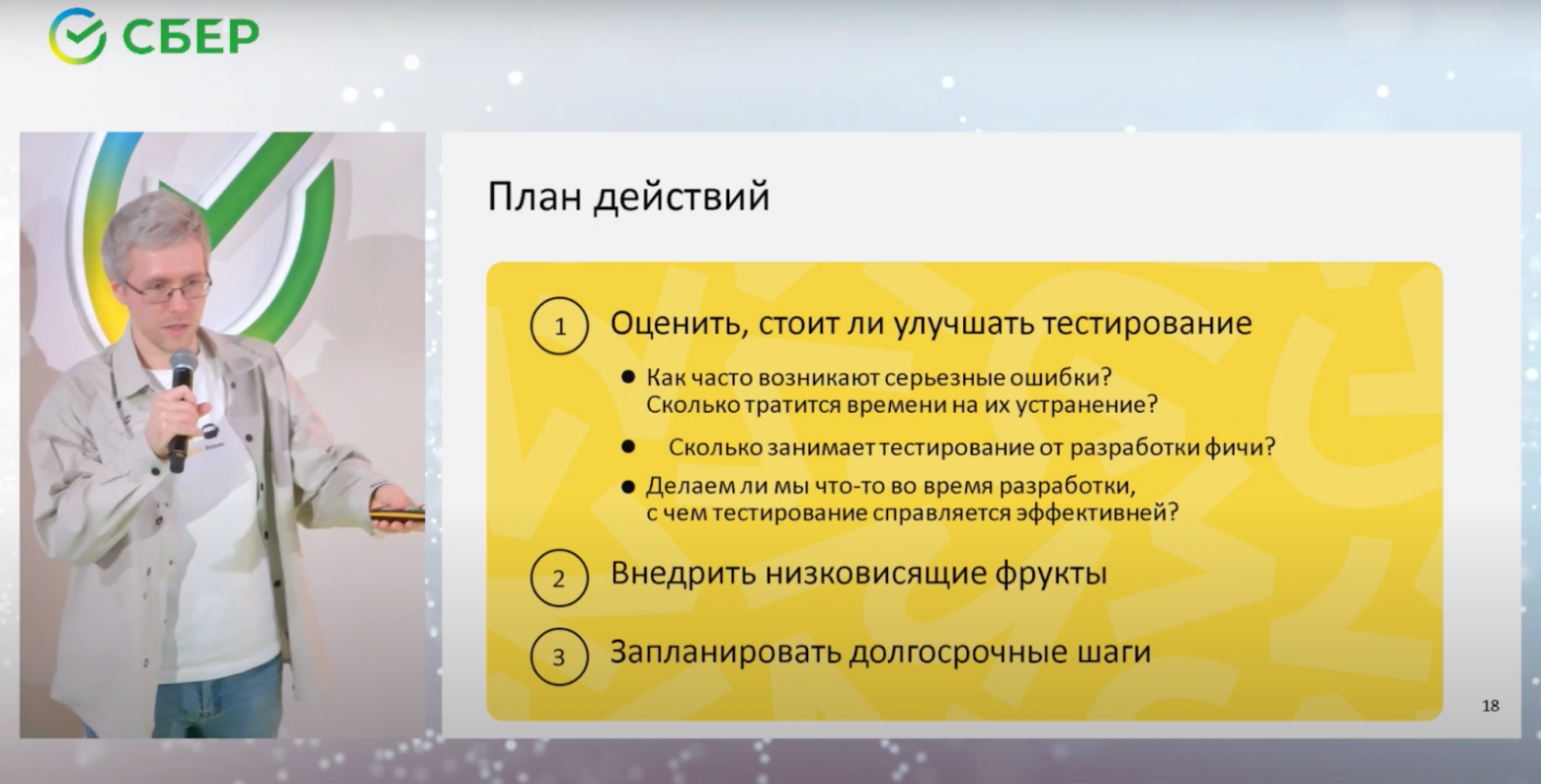
На текущем этапе развития робототехники еще не существует единого пайплайна для тестирования роботов, несмотря на наличие большого количества различных инструментов для этого - тестирование по нодам, симуляторы и прочие. Так как же устроить полевые испытания и как ROS может помочь этим? Опытом делился Яндекс.Маркет.
Спикер: Дементьев Юрий Николаевич
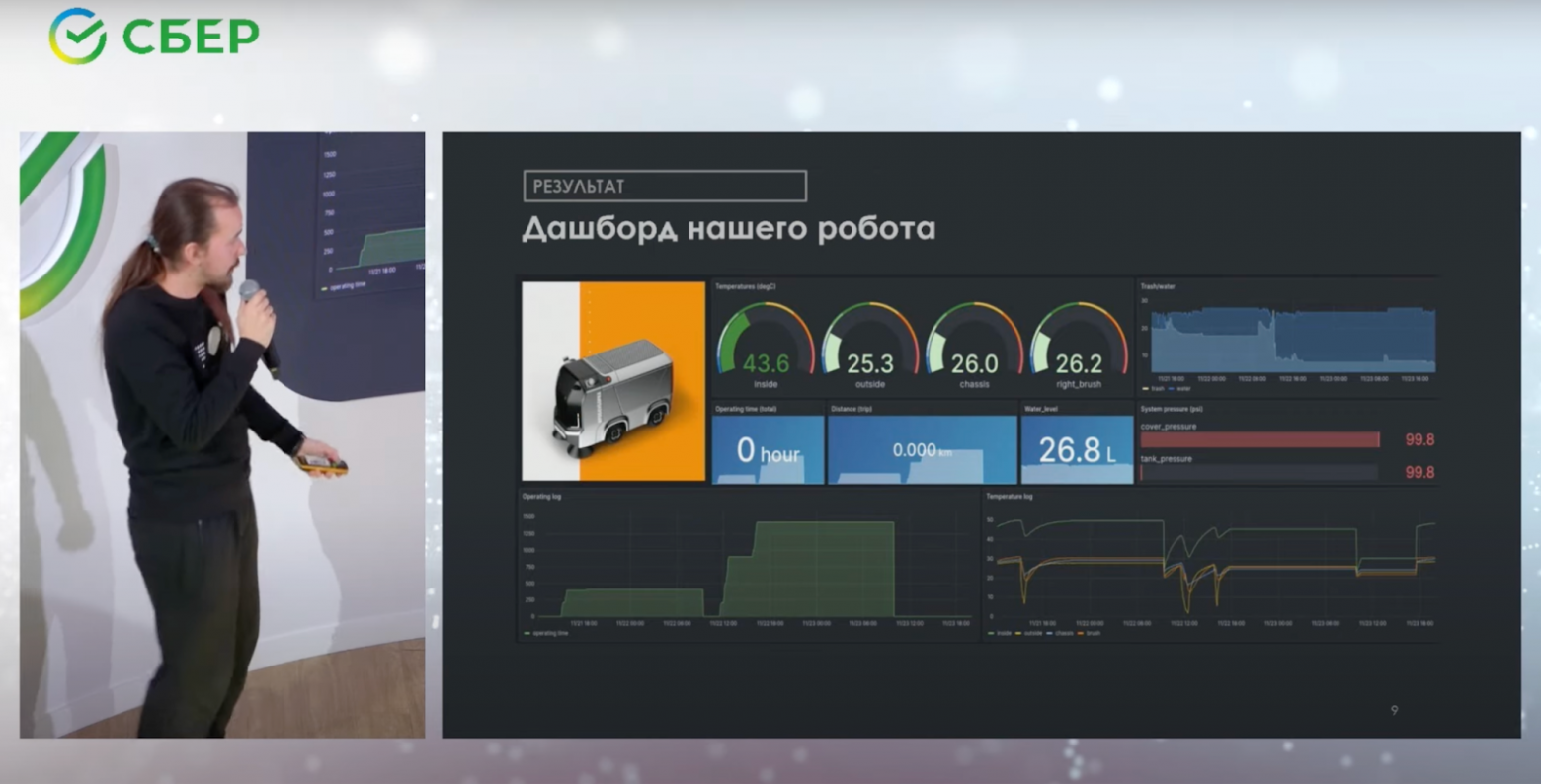
Разработка робота для разделяемой с человеком среды
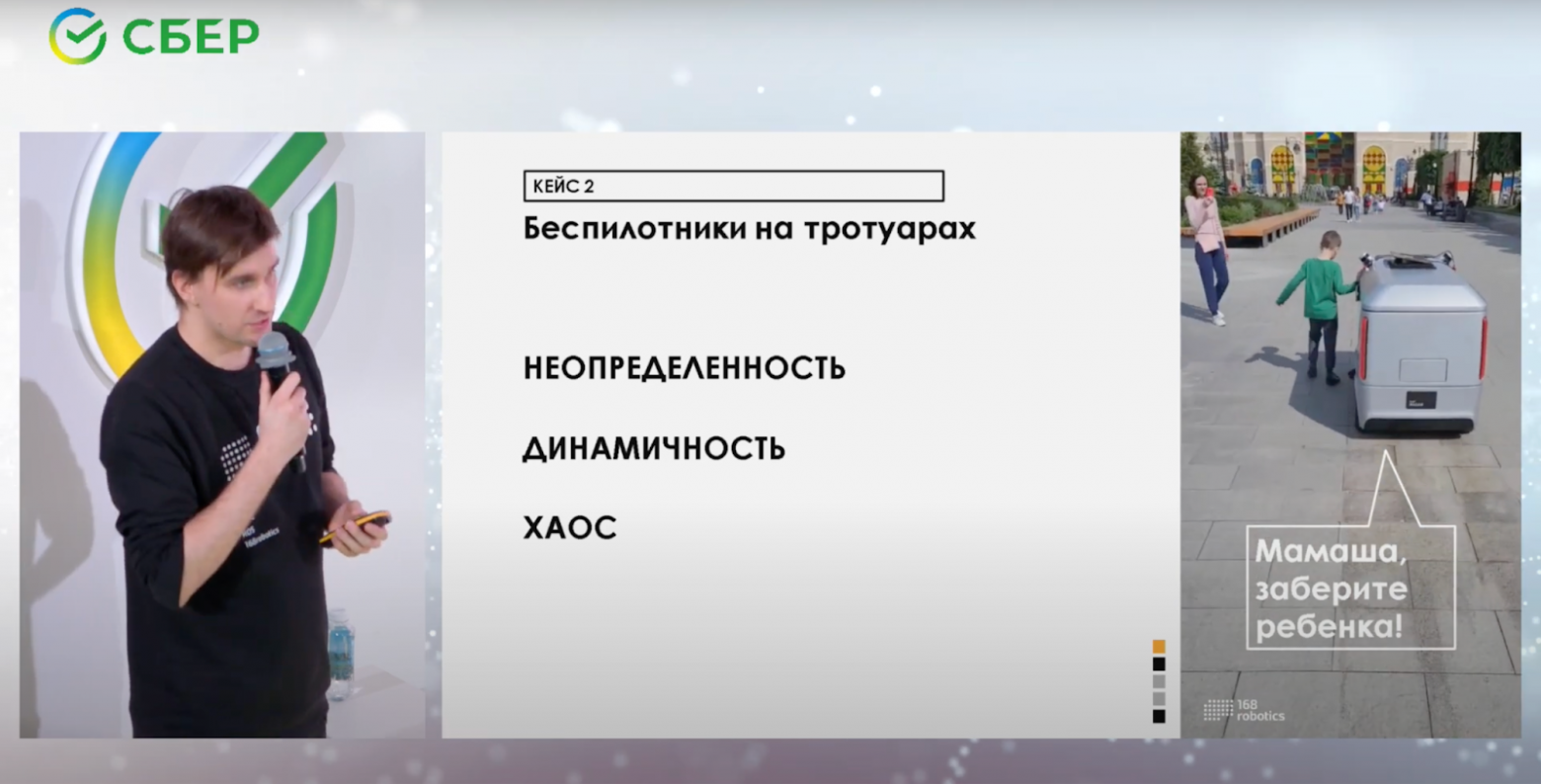
Компания 168robotics поделилась ответом на вопросы: как сделать сервисного робота-уборщика в условиях, где люди всегда норовят подойти к роботу? Чем сервисный (мобильный) робот отличается от беспилотного автомобиля и как он работает с неопределенностью, динамичностью и хаосом?
Спикер: Пархоменко Александр Витальевич
Rosbag Parquet Storage API
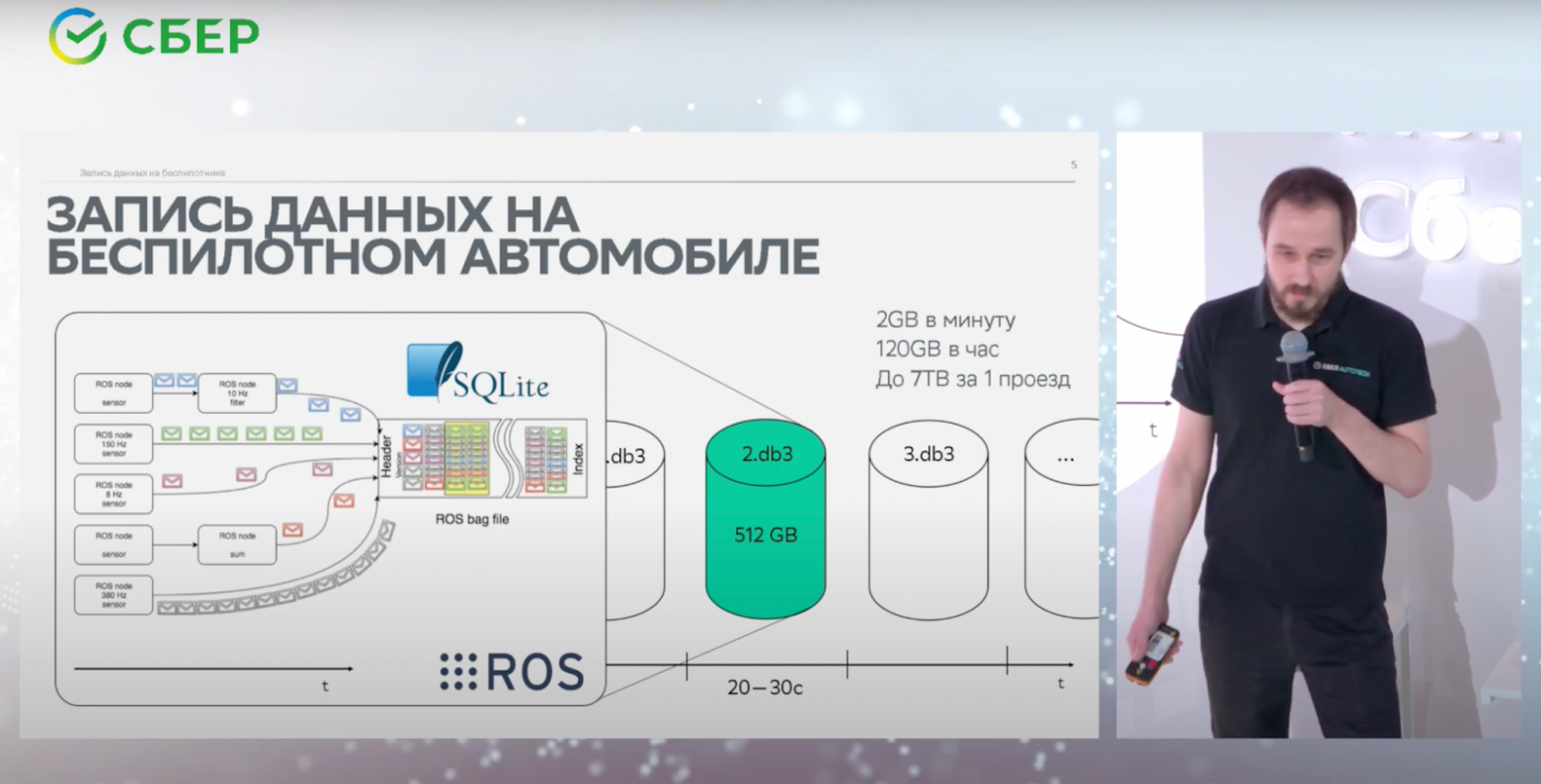
Из доклада вы узнаете, какие задачи BigData существуют в компании SbetAutoTech, почему инженеры приняли решение перейти на запись росбэгов в формате Parquet, и с какими трудностями столкнулись во время разработки собственного плагина - Rosbag Parquet Storage API, позволяющего организовать чтение и запись данных в формате Apache Parquet.
Спикеры: Евгений Глотов, Максим Партин
Логгирование и сбор метрик в микросервисных архитектурах
Доклад компании 168 robotics про опыт построения бесшовной работы с системой сбора метрик на роботе с хранением на сервере использующая микрсервисы. Давно искали как это сделать? Подробная инструкция в видео!
Спикер: Македонский Вячеслав Дмитриевич
HD-радар миллиметрового диапазона. Отечественный и современный
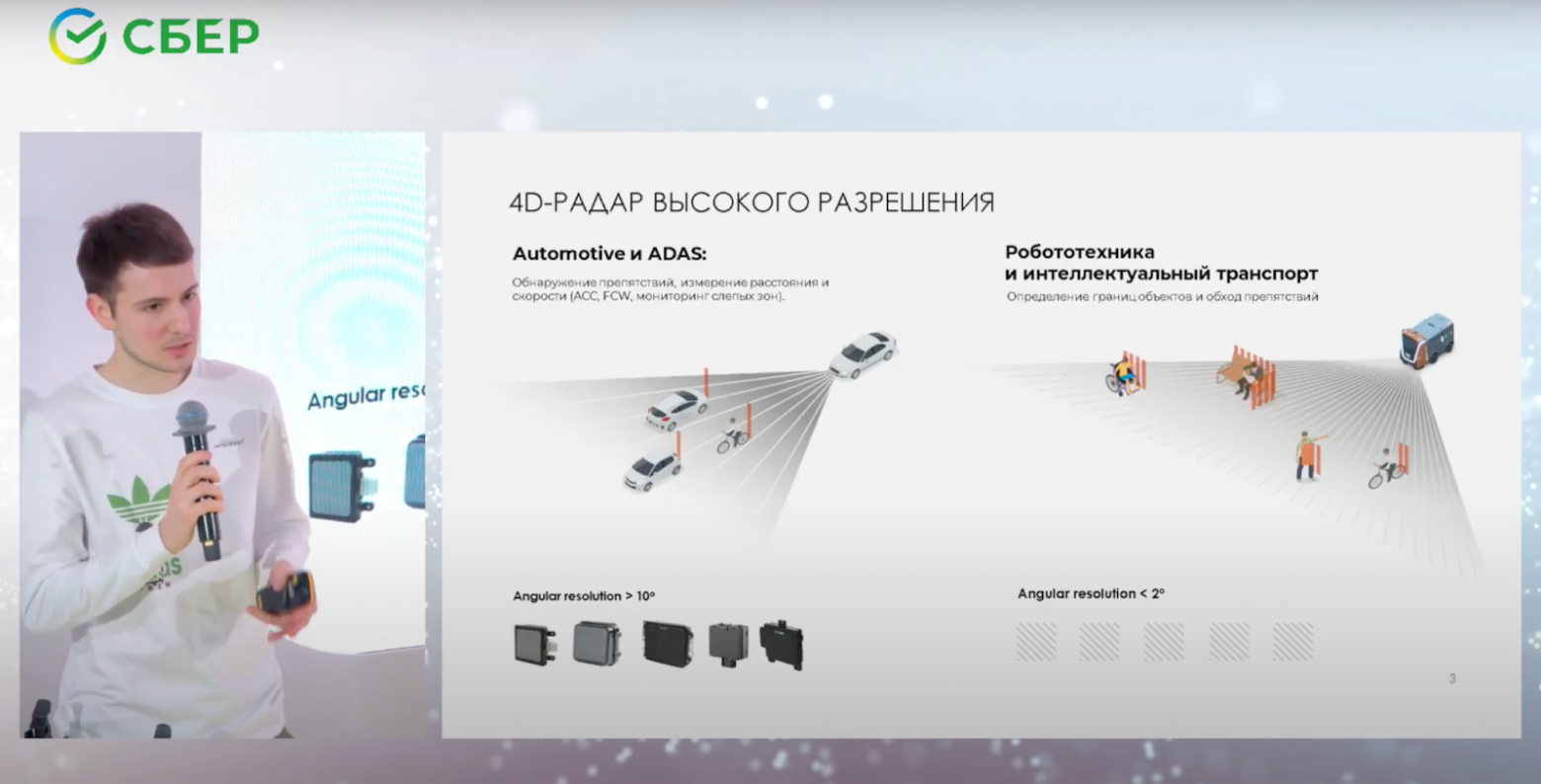
Тот случай, когда на рынке нет подходящего решения. Компания Интегрант презентовала радар собственной разработки и производства. Демо (RVIZ облако точек), ролики, интерактив.
Спикер: Ковач Илья
Zenoh - новое ROS middleware. Проще. Масштабируемее. Быстрее

Почему команда ROS SberAutoTech искала альтернативное middleware вместо DDS? Какие новые возможности открывает Zenoh уже сегодня? Постановка проблемы и обзор нового инструмента.
Спикер: Соколков Роман Вячеславович
Ros2 Control, как основной фреймворк управления роботами, на примере робота манипулятора

Короткий обзор фреймворка ROS2_Control от компании VoltBro в приложении к управлению роботом манипулятором: преимущества, архитектура, применение.
Спикер: Щербов Роман Михайлович
Во второй статье мы познакомили Вас с интересными докладами прошлого ROS Meetup посвященным непосредственно роботам и ROS. Но на этом все не заканчивается! Следующий ROS Meetup объединит очно уже более 400 участников, продлится два дня и проведет свою выставку роботов. Все доклады разбиты по тематическим блокам, мы уверены, что каждый из Вас найдет что-то интересное для себя. Приходите, зовите с собой друзей и близких, будет весело!
Как зарегистрироваться на ROS Meetup 27-28 апреля?
Чтобы зарегистрироваться слушателем в конференц-зале или онлайн, нужно заполнить форму. Для корректной работы формы регистрации обязательно наличие в браузере установленного сертификата Минцифры.
Организатор митапа — ROS-сообщество при поддержке Центра робототехники Сбера.
Все вопросы по мероприятию можно задать в телеграм-чате.
Приходите, будет интересно!
