Comments 35
Если я правильно понял то коэф. нестационарного объекта побили на интервалы и для каждого интервала посчитали оптимальные коэф. для нечеткого регулятора.
Собственно вопрос, а что мешает тоже самое сделать в случае классического ПИД регулятора? ну и сравнить результаты.
Ещё стоит отметить, что фаззи, на сколько я понимаю автора, — статический регулятор, а ПИД — динамический. То есть ПИД сможет ещё и компенсацию возмущения дать.
с одной стороны интеграторов — нет, астатизм 0 порядка должен быть; с другой стороны регулятор — нелинейный, незнаю насколько к нему будет применимо определение "статический".
Я никогда не занимался всерьёз фази системами, так что могу упускать какие-то нюансы. Но на мой взгляд, там происходит следующее. Система нечёткой логики принимает на вход три сигнала и выдаёт на выход один сигнал. У системы нет собственных внутренних состояний (нелинейность без памяти), преобразование детерминированное. То есть для одних и тех же входных сигналов мы всегда будем получать один и тот же выходной сигнал. Фактически, мы говорим о некоторой функции R^3 -> R. Это и есть статический нелинейный регулятор по состоянию. Причём, на сколько я понимаю, функция получается непрерывная.
Далее, как я понимаю, фази логика со всеми лингвистическими переменными это просто способ параметризировать нелинейную функцию. Своеобразный и типа как обладающий инженерным смыслом. Но, в конечном итоге, всё сводится к параметризации нелинейной функции обратной связи и оптимизации парамтров.
Можно взять другую параметризацию, например на нейронных сетях. Причем, так как и то и то является универсальным аппроксиматором, то должна существовать нейронная сеть, в точности повторяющая настроенную нечёткую логику. Можно даже какой-то свой функциональный базис придумать, но это всё равно останется нелинейная статическая функция состояния.
Но нам ничего не мешает завести в качестве переменных в эту функцию например положение управляющиего элемента. Наприме ввести правило, если угол отклонения рулей большой, то уменьшаем. Тогда одним из параметров функции управления будет интегральная составляющая как в ПИД.
1) фиксируют характеристики объекта управления в определенных точках в зависимости от параметра (скорость, масса, время, и.т.д.) в данном случае это время, например: t=0, 2, 4, …;
2) для каждого фиксированного объекта считают регулятор (обычно ПИ);
3) коэффициенты регулятора вводят как функции от параметра.
И самое главное — можно оценить запасы устойчивости! (как это делать для нечеткой логики честно говоря не представляю).
Это баллистическая ракета, передаточная функция по углу тангажа. Я ее готовую взял из книги.Гостев В.И. нечеткая логика в системах управленич
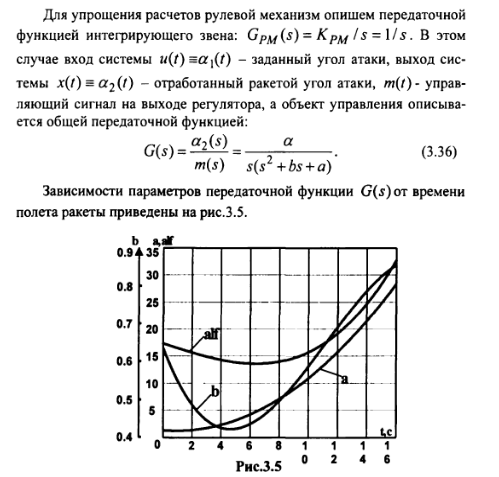
т.е. ни одного неустойчивого звена, вопрос, откуда у Вас взялся довесок:
W(s) = (s+r) / (s+c)
и еще с отрицательным c?

Разобрался. Исходная система не устойчива — как минимум имеет два неустойчивых полюса (при t=0). Собсно вместо регулятора надо ставить корректирующее звено, тогда система станет устойчивой в замкнутом виде.
p.s. кстати баллистическая ракета тут — фау-2.
система с корр. звеном для t=0:

и ее реакция на 1 скачек:
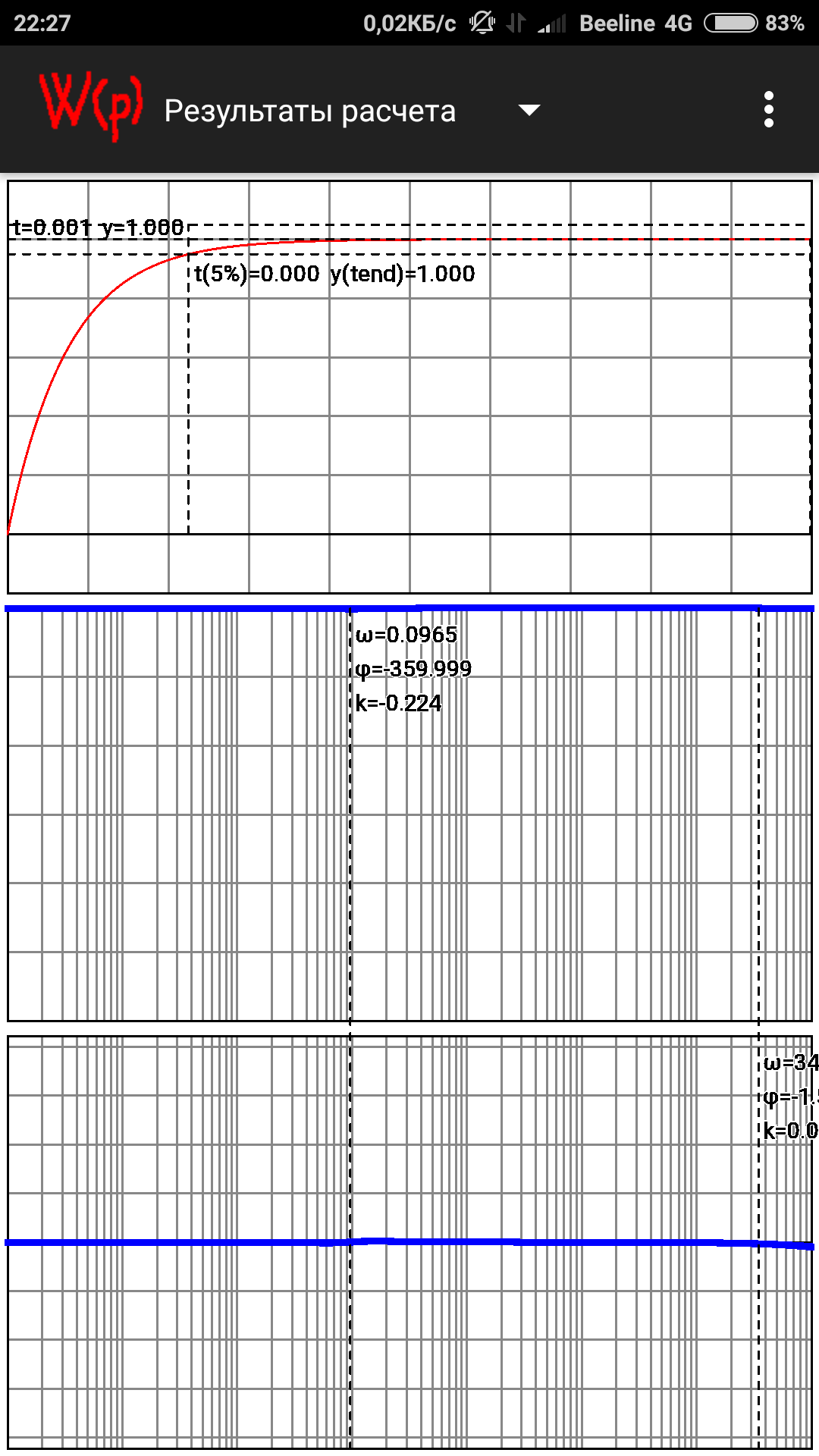
шаг сетки по времени — 1e-5.
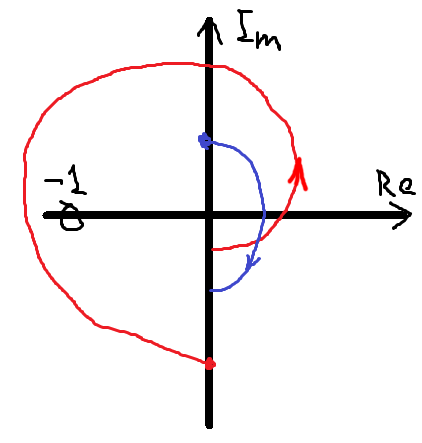
ЛАЧХ исходной, разомкнутой системы:

Т.к. разомкнутая система имеет два неустойчивых корня, то для того что бы замкнутая система была устойчивой — АФХ разомкнутой системы должна охватывать точку -1, с пересечением действительной оси против часовой стрелки один раз (синим — АФХ исходной системы, красным — желаемый АФХ):
ЛАЧХ разомкнутой системы с корр. звеном:

Если у вас система с переменными параметрами, которая устойчива для каждого фиксированного значения параметров (объект в точке плюс ваш регулятор, посчитанный в этой точке), то отсюда, в общем случае, не следует устойчивость замкнутой системы при варьировании параметра.
Коэф. регулятора/корр. звена изменяются вместе с параметрами системы, так что должна быть устойчивой.
Нет, я так не думаю. Даже в относительно простом случае, когда у вас варьируемый параметр может принимать только два значения, и для каждого из значений вы посчитали регулятор и получили устойчивую систему второго порядка или выше, то неудачная последовательность моментов переключения может привести к неустойчивости системы.
Тут параметры системы не меняются скачком, а плавно тихой сапой ползут (центровка по мере выработки топлива меняется, аэродинамика меняется в зависимости от маха).
Ну и зачем переключать коэф.? можно интерполировать, например линейно.
Я пытаюсь сказать, что для системы с переменными параметрами в общем случае недостаточно показать, что для каждого момента времени система с фиксированными параметрами устойчива. Например, пусть у вас система второго порядка вида

Легко проверить, что для любого значения времени t матрица состояний Гурвицева, причем у неё постоянные собственные числа, -1 и -1. Что вы думаете про устойчивость этой системы?
Я не говорю про какой-то конкретный объект, у которого параметры меняются значительно медленнее, чем происходит управление. Я в целом о подходе.
Я пытаюсь сказать, что для системы с переменными параметрами в общем случае недостаточно показать, что для каждого момента времени система с фиксированными параметрами устойчива.
а что ж еще требуется? хотя вобщем да, мало сказать устойчива или нет, неплохо бы еще показать запасы устойчивости по апмлитуде/фазе.
Я не говорю про какой-то конкретный объект, у которого параметры меняются значительно медленнее, чем происходит управление. Я в целом о подходе.
Не пойму о каком подходе речь.
Тут в статье кстати приведен занятный объект управления, аж 1942года разработки, очень сомневаюсь что тогда применяли нечеткую логику, наверняка что то аналогомеханическое было, из классического ТАУ.
а что ж еще требуется?
Вы посмотрели пример, который я привел? Для любого фиксированного t соответствующая система с "замороженными" параметрами устойчива. Попробуйте её промоделировать когда t это время.
Для любого фиксированного t соответствующая система с "замороженными" параметрами устойчива.
чую тут дело в том что в модели параметры системы существенно меняются вместе с управляющим воздействием, короче говоря система существенно нестационарна и методы классического ТАУ к ней вероятно вообще неприменимы.
Собсно в статье приводится так называемый "квазистационарный" объект, т.е. такой для которого метод замораживания коэффициентов годится.
Поправим спасибо
В рисунке под номером три ошибка, в подписе к скорости
Создание регулятора на базе нечеткой логики с многоканальной настройкой