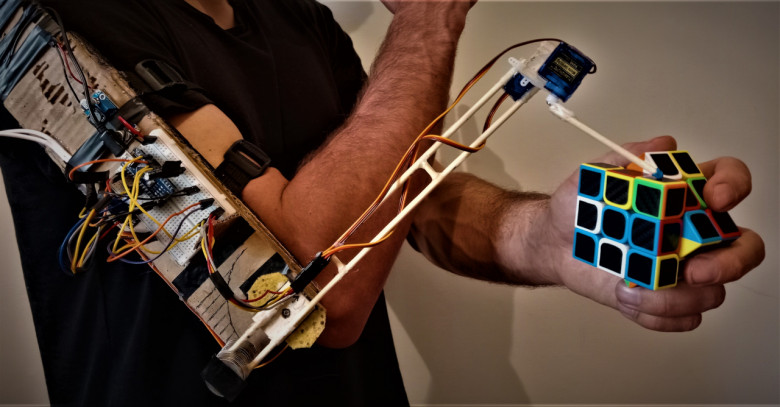
В прошлый раз я рассказывал о контекстно-зависимом поведении протеза и теоретизировал по поводу дальнейшего развития данной концепции. Однако в тот же момент уже было понятно, что дальнейшие эксперименты невозможны без, так сказать, надежной базы, то есть без полнофункционального, пригодного к использованию по своим механическим и эксплуатационным характеристикам прототипа. Такой и была моя задача на эту итерацию - сделать руку, которая механически сможет выдержать манипуляции с габаритными предметами, будет иметь автономное питание, и самое главное, будет управляться "по-настоящему", с помощью миодатчика на бицепсе.