Межпроцессное взаимодействие (Inter-process communication (IPC)) — это набор методов для обмена данными между потоками процессов. Процессы могут быть запущены как на одном и том же компьютере, так и на разных, соединенных сетью. IPC бывают нескольких типов: «сигнал», «сокет», «семафор», «файл», «сообщение»…
В данной статье я хочу рассмотреть всего 3 типа IPC:
Для передачи сообщений можно использовать механизмы сокетов, каналов, D-bus и другие технологии. Про сокеты на каждом углу можно почитать, а про D-bus отдельную статью написать. Поэтому я решил остановиться на малоозвученных технологиях отвечающих стандартам POSIX и привести рабочие примеры.
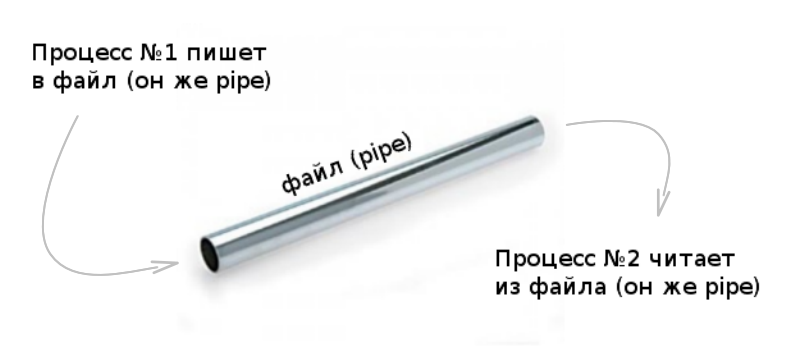
Рассмотрим передачу сообщений по именованным каналам. Схематично передача выглядит так:
Для создания именованных каналов будем использовать функцию, mkfifo():
Функция создает специальный FIFO файл с именем pathname, а параметр mode задает права доступа к файлу.
Как только файл создан, любой процесс может открыть этот файл для чтения или записи также, как открывает обычный файл. Однако, для корректного использования файла, необходимо открыть его одновременно двумя процессами/потоками, одним для получение данных (чтение файла), другим на передачу (запись в файл).
В случае успешного создания FIFO файла, mkfifo() возвращает 0 (нуль). В случае каких либо ошибок, функция возвращает -1 и выставляет код ошибки в переменную errno.
Типичные ошибки, которые могут возникнуть во время создания канала:
Мы открываем файл только для чтения (O_RDONLY). И могли бы использовать O_NONBLOCK модификатор, предназначенный специально для FIFO файлов, чтобы не ждать когда с другой стороны файл откроют для записи. Но в приведенном коде такой способ неудобен.
Компилируем программу, затем запускаем ее:
В соседнем терминальном окне выполняем:
В результате мы увидим следующий вывод от программы:
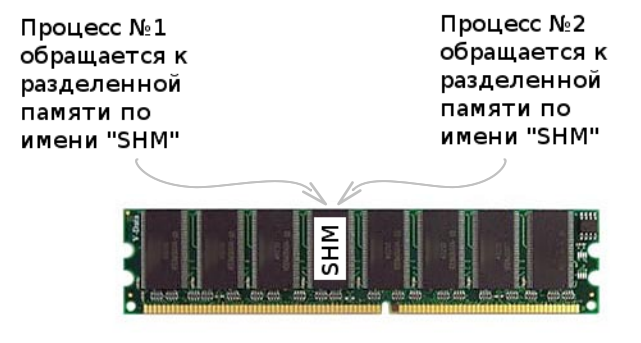
Следующий тип межпроцессного взаимодействия — разделяемая память (shared memory). Схематично изобразим ее как некую именованную область в памяти, к которой обращаются одновременно два процесса:
Для выделения разделяемой памяти будем использовать POSIX функцию shm_open():
Функция возвращает файловый дескриптор, который связан с объектом памяти. Этот дескриптор в дальнейшем можно использовать другими функциями (к примеру, mmap() или mprotect()).
Целостность объекта памяти сохраняется, включая все данные связанные с ним, до тех пор пока объект не отсоединен/удален (shm_unlink()). Это означает, что любой процесс может получить доступ к нашему объекту памяти (если он знает его имя) до тех пор, пока явно в одном из процессов мы не вызовем shm_unlink().
Переменная oflag является побитовым «ИЛИ» следующих флагов:
После создания общего объекта памяти, мы задаем размер разделяемой памяти вызовом ftruncate(). На входе у функции файловый дескриптор нашего объекта и необходимый нам размер.
Следующий код демонстрирует создание, изменение и удаление разделяемой памяти. Так же показывается как после создания разделяемой памяти, программа выходит, но при следующем же запуске мы можем получить к ней доступ, пока не выполнен shm_unlink().
После создания объекта памяти мы установили нужный нам размер shared memory вызовом ftruncate(). Затем мы получили доступ к разделяемой памяти при помощи mmap(). (Вообще говоря, даже с помощью самого вызова mmap() можно создать разделяемую память. Но отличие вызова shm_open() в том, что память будет оставаться выделенной до момента удаления или перезагрузки компьютера.)
Компилировать код на этот раз нужно с опцией -lrt:
Смотрим что получилось:
Аргумент «create» в нашей программе мы используем как для создания разделенной памяти, так и для изменения ее содержимого.
Зная имя объекта памяти, мы можем менять содержимое разделяемой памяти. Но стоит нам вызвать shm_unlink(), как память перестает быть нам доступна и shm_open() без параметра O_CREATE возвращает ошибку «No such file or directory».
Семафор — самый часто употребляемый метод для синхронизации потоков и для контролирования одновременного доступа множеством потоков/процессов к общей памяти (к примеру, глобальной переменной). Взаимодействие между процессами в случае с семафорами заключается в том, что процессы работают с одним и тем же набором данных и корректируют свое поведение в зависимости от этих данных.
Есть два типа семафоров:
Смысл семафора со счетчиком в том, чтобы дать доступ к какому-то ресурсу только определенному количеству процессов. Остальные будут ждать в очереди, когда ресурс освободится.
Итак, для реализации семафоров будем использовать POSIX функцию sem_open():
В функцию для создания семафора мы передаем имя семафора, построенное по определенным правилам и управляющие флаги. Таким образом у нас получится именованный семафор.
Имя семафора строится следующим образом: в начале идет символ "/" (косая черта), а следом латинские символы. Символ «косая черта» при этом больше не должен применяться. Длина имени семафора может быть вплоть до 251 знака.
Если нам необходимо создать семафор, то передается управляющий флаг O_CREATE. Чтобы начать использовать уже существующий семафор, то oflag равняется нулю. Если вместе с флагом O_CREATE передать флаг O_EXCL, то функция sem_open() вернет ошибку, в случае если семафор с указанным именем уже существует.
Параметр mode задает права доступа таким же образом, как это объяснено в предыдущих главах. А переменной value инициализируется начальное значение семафора. Оба параметра mode и value игнорируются в случае, когда семафор с указанным именем уже существует, а sem_open() вызван вместе с флагом O_CREATE.
Для быстрого открытия существующего семафора используем конструкцию:
Рассмотрим пример использования семафора для синхронизации процессов. В нашем примере один процесс увеличивает значение семафора и ждет, когда второй сбросит его, чтобы продолжить дальнейшее выполнение.
В одной консоли запускаем:
В соседней консоли запускаем:
Вместо бинарного семафора, для которого так же используется функция sem_open, я рассмотрю гораздо чаще употребляемый семафор, называемый «мьютекс» (mutex).
Мьютекс по существу является тем же самым, чем является бинарный семафор (т.е. семафор с двумя состояниями: «занят» и «не занят»). Но термин «mutex» чаще используется чтобы описать схему, которая предохраняет два процесса от одновременного использования общих данных/переменных. В то время как термин «бинарный семафор» чаще употребляется для описания конструкции, которая ограничивает доступ к одному ресурсу. То есть бинарный семафор используют там, где один процесс «занимает» семафор, а другой его «освобождает». В то время как мьютекс освобождается тем же процессом/потоком, который занял его.
Без мьютекса не обойтись в написании, к примеру базы данных, к которой доступ могут иметь множество клиентов.
Для использования мьютекса необходимо вызвать функцию pthread_mutex_init():
Функция инициализирует мьютекс (перемнную mutex) аттрибутом mutexattr. Если mutexattr равен NULL, то мьютекс инициализируется значением по умолчанию. В случае успешного выполнения функции (код возрата 0), мьютекс считается инициализированным и «свободным».
Типичные ошибки, которые могут возникнуть:
Функция pthread_mutex_lock(), если mutex еще не занят, то занимает его, становится его обладателем и сразу же выходит. Если мьютекс занят, то блокирует дальнейшее выполнение процесса и ждет освобождения мьютекса.
Функция pthread_mutex_trylock() идентична по поведению функции pthread_mutex_lock(), с одним исключением — она не блокирует процесс, если mutex занят, а возвращает EBUSY код.
Фунция pthread_mutex_unlock() освобождает занятый мьютекс.
Коды возврата для pthread_mutex_lock():
Данный пример демонстрирует совместный доступ двух потоков к общей переменной. Один поток (первый поток) в автоматическом режиме постоянно увеличивает переменную counter на единицу, при этом занимая эту переменную на целую секунду. Этот первый поток дает второму доступ к переменной count только на 10 миллисекунд, затем снова занимает ее на секунду. Во втором потоке предлагается ввести новое значение для переменной с терминала.
Если бы мы не использовали технологию «мьютекс», то какое значение было бы в глобальной переменной, при одновременном доступе двух потоков, нам не известно. Так же во время запуска становится очевидна разница между pthread_mutex_lock() и pthread_mutex_trylock().
Компилировать код нужно с дополнительным параметром -lpthread:
Запускаем и меняем значение переменной просто вводя новое значение в терминальном окне:
В следующих статьях я хочу рассмотреть технологии d-bus и RPC. Если есть интерес, дайте знать.
Спасибо.
UPD: Обновил 3-ю главу про семафоры. Добавил подглаву про мьютекс.
В данной статье я хочу рассмотреть всего 3 типа IPC:
Отступление: данная статья является учебной и расчитана на людей, только еще вступающих на путь системного программирования. Ее главный замысел — познакомиться с различными способами взаимодействия между процессами на POSIX-совместимой ОС.
Именованный канал
Для передачи сообщений можно использовать механизмы сокетов, каналов, D-bus и другие технологии. Про сокеты на каждом углу можно почитать, а про D-bus отдельную статью написать. Поэтому я решил остановиться на малоозвученных технологиях отвечающих стандартам POSIX и привести рабочие примеры.
Рассмотрим передачу сообщений по именованным каналам. Схематично передача выглядит так:
Для создания именованных каналов будем использовать функцию, mkfifo():
#include <sys/stat.h> int mkfifo(const char *pathname, mode_t mode);
Функция создает специальный FIFO файл с именем pathname, а параметр mode задает права доступа к файлу.
Примечание: mode используется в сочетании с текущим значением umask следующим образом: (mode & ~umask). Результатом этой операции и будет новое значение umask для создаваемого нами файла. По этой причине мы используем 0777 (S_IRWXO | S_IRWXG | S_IRWXU), чтобы не затирать ни один бит текущей маски.
Как только файл создан, любой процесс может открыть этот файл для чтения или записи также, как открывает обычный файл. Однако, для корректного использования файла, необходимо открыть его одновременно двумя процессами/потоками, одним для получение данных (чтение файла), другим на передачу (запись в файл).
В случае успешного создания FIFO файла, mkfifo() возвращает 0 (нуль). В случае каких либо ошибок, функция возвращает -1 и выставляет код ошибки в переменную errno.
Типичные ошибки, которые могут возникнуть во время создания канала:
- EACCES — нет прав на запуск (execute) в одной из директорий в пути pathname
- EEXIST — файл pathname уже существует, даже если файл — символическая ссылка
- ENOENT — не существует какой-либо директории, упомянутой в pathname, либо является битой ссылкой
- ENOSPC — нет места для создания нового файла
- ENOTDIR — одна из директорий, упомянутых в pathname, на самом деле не является таковой
- EROFS — попытка создать FIFO файл на файловой системе «только-на-чтение»
Пример
mkfifo.c
[скачать]#include <sys/stat.h> #include <fcntl.h> #include <string.h> #include <stdio.h> #define NAMEDPIPE_NAME "/tmp/my_named_pipe" #define BUFSIZE 50 int main (int argc, char ** argv) { int fd, len; char buf[BUFSIZE]; if ( mkfifo(NAMEDPIPE_NAME, 0777) ) { perror("mkfifo"); return 1; } printf("%s is created\n", NAMEDPIPE_NAME); if ( (fd = open(NAMEDPIPE_NAME, O_RDONLY)) <= 0 ) { perror("open"); return 1; } printf("%s is opened\n", NAMEDPIPE_NAME); do { memset(buf, '\0', BUFSIZE); if ( (len = read(fd, buf, BUFSIZE-1)) <= 0 ) { perror("read"); close(fd); remove(NAMEDPIPE_NAME); return 0; } printf("Incomming message (%d): %s\n", len, buf); } while ( 1 ); }
Мы открываем файл только для чтения (O_RDONLY). И могли бы использовать O_NONBLOCK модификатор, предназначенный специально для FIFO файлов, чтобы не ждать когда с другой стороны файл откроют для записи. Но в приведенном коде такой способ неудобен.
Компилируем программу, затем запускаем ее:
$ gcc -o mkfifo mkfifo.c $ ./mkfifo
В соседнем терминальном окне выполняем:
$ echo 'Hello, my named pipe!' > /tmp/my_named_pipe
В результате мы увидим следующий вывод от программы:
$ ./mkfifo /tmp/my_named_pipe is created /tmp/my_named_pipe is opened Incomming message (22): Hello, my named pipe! read: Success
Разделяемая память
Следующий тип межпроцессного взаимодействия — разделяемая память (shared memory). Схематично изобразим ее как некую именованную область в памяти, к которой обращаются одновременно два процесса:
Для выделения разделяемой памяти будем использовать POSIX функцию shm_open():
#include <sys/mman.h> int shm_open(const char *name, int oflag, mode_t mode);
Функция возвращает файловый дескриптор, который связан с объектом памяти. Этот дескриптор в дальнейшем можно использовать другими функциями (к примеру, mmap() или mprotect()).
Целостность объекта памяти сохраняется, включая все данные связанные с ним, до тех пор пока объект не отсоединен/удален (shm_unlink()). Это означает, что любой процесс может получить доступ к нашему объекту памяти (если он знает его имя) до тех пор, пока явно в одном из процессов мы не вызовем shm_unlink().
Переменная oflag является побитовым «ИЛИ» следующих флагов:
- O_RDONLY — открыть только с правами на чтение
- O_RDWR — открыть с правами на чтение и запись
- O_CREAT — если объект уже существует, то от флага никакого эффекта. Иначе, объект создается и для него выставляются права доступа в соответствии с mode.
- O_EXCL — установка этого флага в сочетании с O_CREATE приведет к возврату функцией shm_open ошибки, если сегмент общей памяти уже существует.
После создания общего объекта памяти, мы задаем размер разделяемой памяти вызовом ftruncate(). На входе у функции файловый дескриптор нашего объекта и необходимый нам размер.
Пример
Следующий код демонстрирует создание, изменение и удаление разделяемой памяти. Так же показывается как после создания разделяемой памяти, программа выходит, но при следующем же запуске мы можем получить к ней доступ, пока не выполнен shm_unlink().
shm_open.c
[скачать]#include <unistd.h> #include <sys/types.h> #include <sys/mman.h> #include <fcntl.h> #include <stdio.h> #include <string.h> #define SHARED_MEMORY_OBJECT_NAME "my_shared_memory" #define SHARED_MEMORY_OBJECT_SIZE 50 #define SHM_CREATE 1 #define SHM_PRINT 3 #define SHM_CLOSE 4 void usage(const char * s) { printf("Usage: %s <create|write|read|unlink> ['text']\n", s); } int main (int argc, char ** argv) { int shm, len, cmd, mode = 0; char *addr; if ( argc < 2 ) { usage(argv[0]); return 1; } if ( (!strcmp(argv[1], "create") || !strcmp(argv[1], "write")) && (argc == 3) ) { len = strlen(argv[2]); len = (len<=SHARED_MEMORY_OBJECT_SIZE)?len:SHARED_MEMORY_OBJECT_SIZE; mode = O_CREAT; cmd = SHM_CREATE; } else if ( ! strcmp(argv[1], "print" ) ) { cmd = SHM_PRINT; } else if ( ! strcmp(argv[1], "unlink" ) ) { cmd = SHM_CLOSE; } else { usage(argv[0]); return 1; } if ( (shm = shm_open(SHARED_MEMORY_OBJECT_NAME, mode|O_RDWR, 0777)) == -1 ) { perror("shm_open"); return 1; } if ( cmd == SHM_CREATE ) { if ( ftruncate(shm, SHARED_MEMORY_OBJECT_SIZE+1) == -1 ) { perror("ftruncate"); return 1; } } addr = mmap(0, SHARED_MEMORY_OBJECT_SIZE+1, PROT_WRITE|PROT_READ, MAP_SHARED, shm, 0); if ( addr == (char*)-1 ) { perror("mmap"); return 1; } switch ( cmd ) { case SHM_CREATE: memcpy(addr, argv[2], len); addr[len] = '\0'; printf("Shared memory filled in. You may run '%s print' to see value.\n", argv[0]); break; case SHM_PRINT: printf("Got from shared memory: %s\n", addr); break; } munmap(addr, SHARED_MEMORY_OBJECT_SIZE); close(shm); if ( cmd == SHM_CLOSE ) { shm_unlink(SHARED_MEMORY_OBJECT_NAME); } return 0; }
После создания объекта памяти мы установили нужный нам размер shared memory вызовом ftruncate(). Затем мы получили доступ к разделяемой памяти при помощи mmap(). (Вообще говоря, даже с помощью самого вызова mmap() можно создать разделяемую память. Но отличие вызова shm_open() в том, что память будет оставаться выделенной до момента удаления или перезагрузки компьютера.)
Компилировать код на этот раз нужно с опцией -lrt:
$ gcc -o shm_open -lrt shm_open.c
Смотрим что получилось:
$ ./shm_open create 'Hello, my shared memory!' Shared memory filled in. You may run './shm_open print' to see value. $ ./shm_open print Got from shared memory: Hello, my shared memory! $ ./shm_open create 'Hello!' Shared memory filled in. You may run './shm_open print' to see value. $ ./shm_open print Got from shared memory: Hello! $ ./shm_open close $ ./shm_open print shm_open: No such file or directory
Аргумент «create» в нашей программе мы используем как для создания разделенной памяти, так и для изменения ее содержимого.
Зная имя объекта памяти, мы можем менять содержимое разделяемой памяти. Но стоит нам вызвать shm_unlink(), как память перестает быть нам доступна и shm_open() без параметра O_CREATE возвращает ошибку «No such file or directory».
Семафор
Семафор — самый часто употребляемый метод для синхронизации потоков и для контролирования одновременного доступа множеством потоков/процессов к общей памяти (к примеру, глобальной переменной). Взаимодействие между процессами в случае с семафорами заключается в том, что процессы работают с одним и тем же набором данных и корректируют свое поведение в зависимости от этих данных.
Есть два типа семафоров:
- семафор со счетчиком (counting semaphore), определяющий лимит ресурсов для процессов, получающих доступ к ним
- бинарный семафор (binary semaphore), имеющий два состояния «0» или «1» (чаще: «занят» или «не занят»)
Семафор со счетчиком
Смысл семафора со счетчиком в том, чтобы дать доступ к какому-то ресурсу только определенному количеству процессов. Остальные будут ждать в очереди, когда ресурс освободится.
Итак, для реализации семафоров будем использовать POSIX функцию sem_open():
#include <semaphore.h> sem_t *sem_open(const char *name, int oflag, mode_t mode, unsigned int value);
В функцию для создания семафора мы передаем имя семафора, построенное по определенным правилам и управляющие флаги. Таким образом у нас получится именованный семафор.
Имя семафора строится следующим образом: в начале идет символ "/" (косая черта), а следом латинские символы. Символ «косая черта» при этом больше не должен применяться. Длина имени семафора может быть вплоть до 251 знака.
Если нам необходимо создать семафор, то передается управляющий флаг O_CREATE. Чтобы начать использовать уже существующий семафор, то oflag равняется нулю. Если вместе с флагом O_CREATE передать флаг O_EXCL, то функция sem_open() вернет ошибку, в случае если семафор с указанным именем уже существует.
Параметр mode задает права доступа таким же образом, как это объяснено в предыдущих главах. А переменной value инициализируется начальное значение семафора. Оба параметра mode и value игнорируются в случае, когда семафор с указанным именем уже существует, а sem_open() вызван вместе с флагом O_CREATE.
Для быстрого открытия существующего семафора используем конструкцию:
, где указываются только имя семафора и управляющий флаг.#include <semaphore.h> sem_t *sem_open(const char *name, int oflag);
Пример семафора со счетчиком
Рассмотрим пример использования семафора для синхронизации процессов. В нашем примере один процесс увеличивает значение семафора и ждет, когда второй сбросит его, чтобы продолжить дальнейшее выполнение.
sem_open.c
[скачать]#include <fcntl.h> #include <sys/stat.h> #include <semaphore.h> #include <stdio.h> #define SEMAPHORE_NAME "/my_named_semaphore" int main(int argc, char ** argv) { sem_t *sem; if ( argc == 2 ) { printf("Dropping semaphore...\n"); if ( (sem = sem_open(SEMAPHORE_NAME, 0)) == SEM_FAILED ) { perror("sem_open"); return 1; } sem_post(sem); perror("sem_post"); printf("Semaphore dropped.\n"); return 0; } if ( (sem = sem_open(SEMAPHORE_NAME, O_CREAT, 0777, 0)) == SEM_FAILED ) { perror("sem_open"); return 1; } printf("Semaphore is taken.\nWaiting for it to be dropped.\n"); if (sem_wait(sem) < 0 ) perror("sem_wait"); if ( sem_close(sem) < 0 ) perror("sem_close"); return 0; }
В одной консоли запускаем:
$ ./sem_open Semaphore is taken. Waiting for it to be dropped. <-- здесь процесс в ожидании другого процесса sem_wait: Success sem_close: Success
В соседней консоли запускаем:
$ ./sem_open 1 Dropping semaphore... sem_post: Success Semaphore dropped.
Бинарный семафор
Вместо бинарного семафора, для которого так же используется функция sem_open, я рассмотрю гораздо чаще употребляемый семафор, называемый «мьютекс» (mutex).
Мьютекс по существу является тем же самым, чем является бинарный семафор (т.е. семафор с двумя состояниями: «занят» и «не занят»). Но термин «mutex» чаще используется чтобы описать схему, которая предохраняет два процесса от одновременного использования общих данных/переменных. В то время как термин «бинарный семафор» чаще употребляется для описания конструкции, которая ограничивает доступ к одному ресурсу. То есть бинарный семафор используют там, где один процесс «занимает» семафор, а другой его «освобождает». В то время как мьютекс освобождается тем же процессом/потоком, который занял его.
Без мьютекса не обойтись в написании, к примеру базы данных, к которой доступ могут иметь множество клиентов.
Для использования мьютекса необходимо вызвать функцию pthread_mutex_init():
#include <pthread.h> int pthread_mutex_init(pthread_mutex_t *mutex, const pthread_mutexattr_t *mutexattr);
Функция инициализирует мьютекс (перемнную mutex) аттрибутом mutexattr. Если mutexattr равен NULL, то мьютекс инициализируется значением по умолчанию. В случае успешного выполнения функции (код возрата 0), мьютекс считается инициализированным и «свободным».
Типичные ошибки, которые могут возникнуть:
- EAGAIN — недостаточно необходимых ресурсов (кроме памяти) для инициализации мьютекса
- ENOMEM — недостаточно памяти
- EPERM — нет прав для выполнения операции
- EBUSY — попытка инициализировать мьютекс, который уже был инициализирован, но не унечтожен
- EINVAL — значение mutexattr не валидно
int pthread_mutex_lock(pthread_mutex_t *mutex); int pthread_mutex_trylock(pthread_mutex_t *mutex); int pthread_mutex_unlock(pthread_mutex_t *mutex);
Функция pthread_mutex_lock(), если mutex еще не занят, то занимает его, становится его обладателем и сразу же выходит. Если мьютекс занят, то блокирует дальнейшее выполнение процесса и ждет освобождения мьютекса.
Функция pthread_mutex_trylock() идентична по поведению функции pthread_mutex_lock(), с одним исключением — она не блокирует процесс, если mutex занят, а возвращает EBUSY код.
Фунция pthread_mutex_unlock() освобождает занятый мьютекс.
Коды возврата для pthread_mutex_lock():
- EINVAL — mutex неправильно инициализирован
- EDEADLK — мьютекс уже занят текущим процессом
- EBUSY — мьютекс уже занят
- EINVAL — мьютекс неправильно инициализирован
- EINVAL — мьютекс неправильно инициализирован
- EPERM — вызывающий процесс не является обладателем мьютекса
Пример mutex
mutex.c
[скачать]#include <stdio.h> #include <pthread.h> #include <unistd.h> #include <errno.h> static int counter; // shared resource static pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER; void incr_counter(void *p) { do { usleep(10); // Let's have a time slice between mutex locks pthread_mutex_lock(&mutex); counter++; printf("%d\n", counter); sleep(1); pthread_mutex_unlock(&mutex); } while ( 1 ); } void reset_counter(void *p) { char buf[10]; int num = 0; int rc; pthread_mutex_lock(&mutex); // block mutex just to show message printf("Enter the number and press 'Enter' to initialize the counter with new value anytime.\n"); sleep(3); pthread_mutex_unlock(&mutex); // unblock blocked mutex so another thread may work do { if ( gets(buf) != buf ) return; // NO fool-protection ! Risk of overflow ! num = atoi(buf); if ( (rc = pthread_mutex_trylock(&mutex)) == EBUSY ) { printf("Mutex is already locked by another process.\nLet's lock mutex using pthread_mutex_lock().\n"); pthread_mutex_lock(&mutex); } else if ( rc == 0 ) { printf("WOW! You are on time! Congratulation!\n"); } else { printf("Error: %d\n", rc); return; } counter = num; printf("New value for counter is %d\n", counter); pthread_mutex_unlock(&mutex); } while ( 1 ); } int main(int argc, char ** argv) { pthread_t thread_1; pthread_t thread_2; counter = 0; pthread_create(&thread_1, NULL, (void *)&incr_counter, NULL); pthread_create(&thread_2, NULL, (void *)&reset_counter, NULL); pthread_join(thread_2, NULL); return 0; }
Данный пример демонстрирует совместный доступ двух потоков к общей переменной. Один поток (первый поток) в автоматическом режиме постоянно увеличивает переменную counter на единицу, при этом занимая эту переменную на целую секунду. Этот первый поток дает второму доступ к переменной count только на 10 миллисекунд, затем снова занимает ее на секунду. Во втором потоке предлагается ввести новое значение для переменной с терминала.
Если бы мы не использовали технологию «мьютекс», то какое значение было бы в глобальной переменной, при одновременном доступе двух потоков, нам не известно. Так же во время запуска становится очевидна разница между pthread_mutex_lock() и pthread_mutex_trylock().
Компилировать код нужно с дополнительным параметром -lpthread:
$ gcc -o mutex -lpthread mutex.c
Запускаем и меняем значение переменной просто вводя новое значение в терминальном окне:
$ ./mutex Enter the number and press 'Enter' to initialize the counter with new value anytime. 1 2 3 30 <Enter> <--- новое значение переменной Mutex is already locked by another process. Let's lock mutex using pthread_mutex_lock(). New value for counter is 30 31 32 33 1 <Enter> <--- новое значение переменной Mutex is already locked by another process. Let's lock mutex using pthread_mutex_lock(). New value for counter is 1 2 3
Вместо заключения
В следующих статьях я хочу рассмотреть технологии d-bus и RPC. Если есть интерес, дайте знать.
Спасибо.
UPD: Обновил 3-ю главу про семафоры. Добавил подглаву про мьютекс.

