3 сентября 2012 года, прочитав на сайте Habrahabr новость о соревнованиях летающих роботов, мы поняли – вот оно, дождались! К тому моменту мы уже несколько месяцев думали о том, что пора переводить свой многолетний интерес к робототехнике в профессиональное русло, и искали для этого повод.
Поэтому вопросов об участии не возникало – начались обсуждения. Сразу же решили использовать готовый дрон, сосредоточившись на программном обеспечении. На первый взгляд, условия казались простыми, поэтому иллюзий, что мы сможем победить, не было – команд много, приз всего один. Решили, что будем использовать только камеру, продемонстрировав, таким образом, свою компетентность в области компьютерного зрения.
Забегая вперед, хочется отдельно отметить высокий уровень организации соревнований. Такого в России еще не было. Мы рады, что приняли участие в этом мероприятии и рады, что смогли победить.
Практически все датчики врут: лидар дорог, не видит объема и при этом слепнет в ясную погоду, сонары мешают друг другу и ловят непонятные отражения, ИК-дальномеры и Kinect работают лишь на близких расстояниях.
Полет по датчикам возможен только для узких, можно сказать, лабораторных задач. Кроме того, почти у всех существующих датчиков есть ограничения по радиусу действия.
Камера в этом плане универсальна. По весу и энергопотреблению она сравнима с сонарами, по скорости работы — с лидарами. По дальности и разрешению у камер нет конкурентов. Практически вся живая природа использует оптику, и почему бы и нам было не остановиться на этом решении. Конечно, для работы с камерой нужны эффективные алгоритмы, но именно этим мы и занимаемся в области своих профессиональных интересов.
Вначале для подготовки к соревнованиям свободного времени практически не было – все участники команды работали в разных местах. Встречались для обсуждений или в кафе, или у кого-нибудь дома. Так как у нас уже был опыт работы с наземными роботами, решили тренироваться на них. На Pololu 3Pi поставили камеру, модуль связи, на ватман налепили черную изоленту (позже приклеили полосы черной бумаги) в виде макета полигона, напечатали уменьшенные копии маркеров и начали писать алгоритмы.



Так незаметно подкралось время прохождения первой контрольной точки. По условиям соревнований, нам надо было прислать видеоролик-презентацию команды. Ролик решили снять на фоне Свято-Троицкой Сергиевой Лавры – главной достопримечательности Сергиева Посада. Собрались утром, перед работой (мы работали по-прежнему в разных местах). Температура: -20. Расцвет. Сугробы. С третьего дубля что-то сняли. Посмотрели – посмеялись, но переснимать не стали – решили порадовать и остальных.
Какова же была наша радость, когда мы получили от организаторов соревнования письмо, пусть и содержащее всего одну строчку: «Ваши материалы приняты!».
На этой контрольной точке организаторы выкладывали ролики по мере получения, и мы были в первой-второй десятке. Судя по всему, наш незамысловатый сюжет понравился другим участникам соревнований – пара команд в своих роликах явно нас пародировала.
Посмотрев все — а это более 8 часов! — ролики других участников, мы пришли к выводу, что многие не отдают себе отчета в сложности задачи и не имеют понимания, что и как они будут делать. Следующие контрольные точки это подтвердили – из 237 участников, прошедших КТ-1, после КТ-2 осталось 204 (для ее прохождения необходимо было просто прислать подтверждение, что участник продолжает участие в соревновании), а после третьей — всего 72 (тут уже надо было показать действующего и управляемого автоматически дрона).
Эксперименты с наземным роботом доказали принципиальную возможность выполнить задание только по камере, но необходимо было переходить к полетам.
На этом этапе мы уже располагали квадрокоптером Parrot Ar.Drone 2.0 и успели немного полетать им. Следующим шагом нам необходимо было заняться непосредственно выполнением полетного задания. Было очевидно, что если мы не будем распознавать кресты (маркеры взлета-посадки), на соревнованиях нам делать будет нечего.
Выбрав C# как основной язык разработки и вооружившись готовой библиотекой взаимодействия с Ar.Drone (написанной нашим соотечественником Русланом Баланухиным), мы приступили к разработке системы автоматического управления.
На первом этапе мы поставили перед собой задачу просто висеть над крестом. То есть дрон должен был взлететь, по нижней камере определить крест и зависнуть над его центром, противодействуя воздушным потокам, сносящим его в сторону.
Мы заказали у рекламщиков уменьшенные копии маркеров (диаметром 1 м). Положили один крест в центре комнаты 4х4 м. А дальше начались первые прозрения:
Все это было для нас как ушат холодной воды…
Отказавшись на этом этапе от выделения линий, мы начали распознавать кресты по контуру. Через пару недель «танцев с бубнами» мы добились точности распознавания на уровне 70-80% в любое время дня и при любом освещении, тем самым выполнив поставленную задачу – дрон взлетал и зависал над крестом. Уже на этом этапе мы поняли, что нельзя доверяться одному распознаванию – надо усреднять результат нескольких распознаваний.

На этой картинке красный кружок – центр креста, а желтый – проекция центра дрона.
В это время (за месяц до третьей контрольной точки) нас пригласили принять участие в Весенних Соревнованиях Роботов, организованных Питерским Физико-Математическим Лицеем №239. Одной из дисциплин на них были соревнования летающих роботов по регламенту RobotChallenge «Воздушные гонки».
Такой хороший шанс получить дополнительный опыт полетов и пообщаться с другими пилотами мы не могли упустить. Но времени на подготовку не было, пришлось импровизировать.
Цель соревнований — пролететь как можно больше правильных восьмерок за 10 минут. Согласно регламенту, в качестве помощи в навигации на полу была начерчена пунктирная линия. После некоторых раздумий мы решили использовать наш опыт висения над крестом. Только вместо координаты центра креста передавать в модуль управления дроном верхнюю видимую точку пунктира. В результате, дрон, как мул за морковкой, пытался зависнуть над этой точкой, а мы подсовывали ему следующую.
У нас было всего четыре часа времени на отладку на реальном полигоне накануне соревнований, но решение оказалось не только изящным, но и плодотворным – мы налетали пять кругов, получив приз за второе место.
На этих соревнованиях нас ждал очередной сюрприз – проблемы со связью. Из отведенных 10 минут на попытку мы больше половины времени потратили на установление связи с дроном — он терял ее в процессе полета, сбивался с маршрута. Приходилось его останавливать и начинать выполнение задания заново. В процессе общения с другими участниками выяснилось, что это стандартная проблема дронов Parrot.
Ролик, снятый на этих соревнованиях, мы использовали для прохождения КТ-3.
Вернувшись домой, мы приступили к следующему этапу – полетам между маркерами. После питерских соревнований стало ясно, что необходимо как можно больше летать на реальные расстояния в реальных условиях.
Мы договорились об использовании школьного спортзала на время летних каникул. Напечатали кресты в натуральную величину и опять были удивлены – по нижней камере определить большой крест невозможно, целиком его в нижнюю камеру просто не видно.
В очередной раз пришлось менять концепцию — мы вернулись к определению крестов по линиям. Алгоритм был следующим – сначала получаем все линии, потом начинаем объединять рваные и фильтровать их по контрастности, местоположению (кресты на потолке и стенах нам не нужны), отсекая все лишнее. После этого находим перекрестия и уже по ним пытаемся понять, похоже ли это на настоящие маркеры. То есть фильтруем, фильтруем и еще раз фильтруем. Это ужасно прожорливо по ресурсам, но зато достаточно надежно.
Исходное изображение:

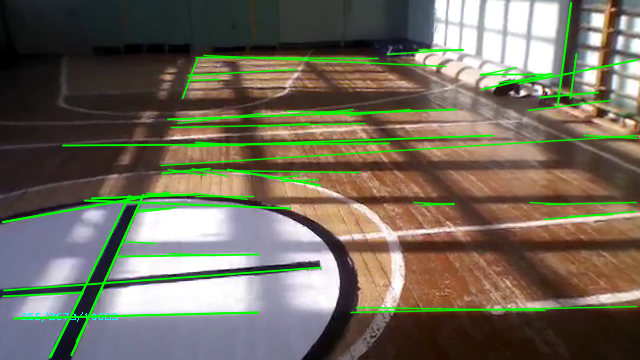
Найденные линии:

Фильтр по контрастности:

Объединяем рваные линии:

Все пересечения:
Фильтр не похожих на крест:

Результат:

Пришло время последней контрольной точки. По условиям соревнований, мы обязаны были пройти ее на полигоне организатора.
На пробный полет мы записались одними из первых. По приезде в КРОК нас ждал очередной сюрприз – к проблемам со связью добавился ветер. Наш дрон банально сдувало, а алгоритма противодействия порывам ветра у нас на тот момент не было. В результате, из двадцати попыток нам удалось выполнить задание КТ-4 только три раза. Спасибо организаторам, что они зачли нам эту попытку. Мы прошли КТ-4 первыми.
В попытках настроить алгоритм противодействия ветру мы в очередной раз столкнулись с проблемой связи. Проводя испытания на улице в ветреную погоду, мы чуть не разбили наш дрон, потеряв связь с ним.
Надо было что-то делать. Как мы уже знали, плохая связь — это общая проблема дронов Parrot. Поэтому мы воспользовались уже найденным до нас способом ее решения — установкой внешней антенны. Внешняя антенна и роутер позволили нам считать вопрос связи закрытым. Как позже выяснилось, многие команды с этой проблемой столкнулись только на соревнованиях.
За три недели до финала организаторы окончательно утвердили полигон. Всем участникам давалась возможность дважды посетить его для настройки алгоритмов.
После первого посещения уже готового полигона у нас сложилось ощущение, что мы не выполним задание. У нас возникло три проблемы:
Попытка пролететь по лабиринту на ручном управлении по камере привела к столкновению со стеной и крушению. Вторая попытка привела к такому же результату.
Все, что мы сделали в первый приезд, – поснимали полигон в разное время — когда солнце было за облаками и не давало лишних теней и, наоборот – при ярком солнце и контрастных тенях.
За оставшуюся неделю мы доработали определение коридора, использовав подход «vanishing point».
Приехав во второй раз, за три дня до соревнований, нам удалось автоматически пролететь коридор в одну сторону, однако проблема посадки и взлета оставалась нерешенной.
У нас оставалось два дня. При этом было непонятно, как повторить условия порывистого ветра, чтобы выяснить, победили ли мы его?
В качестве способа борьбы с ветром мы использовали активное противодействие внешним воздействиям при посадке – стараясь удерживать углы крена, тангажа и рысканья. А взлет решили делать винтом – одновременно набирая высоту и разворачиваясь.
Отлаживали в спортзале, создавая порывы ветра с помощью листа ДВП. Выглядело все это довольно комично.
23-го августа в 21:30, вернувшись из спортзала, мы подняли бокалы за то, что достойно прошли все этапы соревнования – теперь мы знали, что выполним задание. Точнее, что мы имеем хороший шанс его выполнить — Его Величество Случай никто не отменял.
Мы научились летать в коридоре, не сталкиваясь со стенами. Мы хорошо распознавали кресты в любую погоду. Оба креста (думаю, участники меня поймут). Проблемы связи и ветра также были решены.
Единственное, что мы не успели – это автоматический выбор направления маршрута. Для определения поворотов мы использовали правило правой/левой руки, которое переключали после каждой посадки. И это чуть не сыграло с нами злую шутку.
Уперевшись в стенку препятствия на обратном пути при выполнении полета, мы развернулись по правилу правой руки и полетели на уже посещенный маркер. После посадки мы переключились на левую руку. Долетев до последнего поворота, опять развернулись и снова полетели обратно. И только после третьей посадки опять включилось правило правой руки, и мы благополучно вернулись.
Мы понимали, что 6 мин 45 с, полученные нами в первой попытке, — проигрышное время — достаточно кому-либо просто выполнить задание. При этом правило правой/левой руки мы отменить не могли, и была вероятность, что дрон опять собьется и начнет кружить. Тогда на второй попытке мы решили «лететь на все деньги» и подняли скорость дрона в полтора раза. Но, к сожалению, забыли изменить параметр снижения скорости, зависящий от расстояния до препятствия, и не успели вовремя затормозить, окончательно остановившись об стену.
Для нас действительно было неожиданным, что больше никто не сможет пройти дистанцию. Полтора дня мы ждали, что вот-вот кто-то пролетит быстрее нас (у дрона организаторов было лучшее время, но они участвовали в соревнованиях вне зачета), и мы сможем уже расслабиться и отдохнуть, искренне желая успеха другим участникам. Но удача была капризна, и в этот раз она оказалась на нашей стороне.
Ниже запись полета со стороны дрона. Скорость распознавания была неравномерной, поэтому время на ролике не совпадает с реальностью.
Поэтому вопросов об участии не возникало – начались обсуждения. Сразу же решили использовать готовый дрон, сосредоточившись на программном обеспечении. На первый взгляд, условия казались простыми, поэтому иллюзий, что мы сможем победить, не было – команд много, приз всего один. Решили, что будем использовать только камеру, продемонстрировав, таким образом, свою компетентность в области компьютерного зрения.
Забегая вперед, хочется отдельно отметить высокий уровень организации соревнований. Такого в России еще не было. Мы рады, что приняли участие в этом мероприятии и рады, что смогли победить.
Почему камера?
Практически все датчики врут: лидар дорог, не видит объема и при этом слепнет в ясную погоду, сонары мешают друг другу и ловят непонятные отражения, ИК-дальномеры и Kinect работают лишь на близких расстояниях.
Полет по датчикам возможен только для узких, можно сказать, лабораторных задач. Кроме того, почти у всех существующих датчиков есть ограничения по радиусу действия.
Камера в этом плане универсальна. По весу и энергопотреблению она сравнима с сонарами, по скорости работы — с лидарами. По дальности и разрешению у камер нет конкурентов. Практически вся живая природа использует оптику, и почему бы и нам было не остановиться на этом решении. Конечно, для работы с камерой нужны эффективные алгоритмы, но именно этим мы и занимаемся в области своих профессиональных интересов.
Рожденные ползать
Вначале для подготовки к соревнованиям свободного времени практически не было – все участники команды работали в разных местах. Встречались для обсуждений или в кафе, или у кого-нибудь дома. Так как у нас уже был опыт работы с наземными роботами, решили тренироваться на них. На Pololu 3Pi поставили камеру, модуль связи, на ватман налепили черную изоленту (позже приклеили полосы черной бумаги) в виде макета полигона, напечатали уменьшенные копии маркеров и начали писать алгоритмы.
Трое из ларца
Так незаметно подкралось время прохождения первой контрольной точки. По условиям соревнований, нам надо было прислать видеоролик-презентацию команды. Ролик решили снять на фоне Свято-Троицкой Сергиевой Лавры – главной достопримечательности Сергиева Посада. Собрались утром, перед работой (мы работали по-прежнему в разных местах). Температура: -20. Расцвет. Сугробы. С третьего дубля что-то сняли. Посмотрели – посмеялись, но переснимать не стали – решили порадовать и остальных.
Какова же была наша радость, когда мы получили от организаторов соревнования письмо, пусть и содержащее всего одну строчку: «Ваши материалы приняты!».
На этой контрольной точке организаторы выкладывали ролики по мере получения, и мы были в первой-второй десятке. Судя по всему, наш незамысловатый сюжет понравился другим участникам соревнований – пара команд в своих роликах явно нас пародировала.
Посмотрев все — а это более 8 часов! — ролики других участников, мы пришли к выводу, что многие не отдают себе отчета в сложности задачи и не имеют понимания, что и как они будут делать. Следующие контрольные точки это подтвердили – из 237 участников, прошедших КТ-1, после КТ-2 осталось 204 (для ее прохождения необходимо было просто прислать подтверждение, что участник продолжает участие в соревновании), а после третьей — всего 72 (тут уже надо было показать действующего и управляемого автоматически дрона).
Эксперименты с наземным роботом доказали принципиальную возможность выполнить задание только по камере, но необходимо было переходить к полетам.
Как удивителен мир
На этом этапе мы уже располагали квадрокоптером Parrot Ar.Drone 2.0 и успели немного полетать им. Следующим шагом нам необходимо было заняться непосредственно выполнением полетного задания. Было очевидно, что если мы не будем распознавать кресты (маркеры взлета-посадки), на соревнованиях нам делать будет нечего.
Выбрав C# как основной язык разработки и вооружившись готовой библиотекой взаимодействия с Ar.Drone (написанной нашим соотечественником Русланом Баланухиным), мы приступили к разработке системы автоматического управления.
На первом этапе мы поставили перед собой задачу просто висеть над крестом. То есть дрон должен был взлететь, по нижней камере определить крест и зависнуть над его центром, противодействуя воздушным потокам, сносящим его в сторону.
Мы заказали у рекламщиков уменьшенные копии маркеров (диаметром 1 м). Положили один крест в центре комнаты 4х4 м. А дальше начались первые прозрения:
- Оказывается, крестов-то вокруг нас много!
- Оказывается, белое и черное — понятия относительные!
- Оказывается, стандартные алгоритмы выделения линий OpenCV находят линии даже там, где мы и подумать не могли!
- Оказывается, с камеры приходят битые кадры!
Все это было для нас как ушат холодной воды…
Отказавшись на этом этапе от выделения линий, мы начали распознавать кресты по контуру. Через пару недель «танцев с бубнами» мы добились точности распознавания на уровне 70-80% в любое время дня и при любом освещении, тем самым выполнив поставленную задачу – дрон взлетал и зависал над крестом. Уже на этом этапе мы поняли, что нельзя доверяться одному распознаванию – надо усреднять результат нескольких распознаваний.
На этой картинке красный кружок – центр креста, а желтый – проекция центра дрона.
Морковка для дрона
В это время (за месяц до третьей контрольной точки) нас пригласили принять участие в Весенних Соревнованиях Роботов, организованных Питерским Физико-Математическим Лицеем №239. Одной из дисциплин на них были соревнования летающих роботов по регламенту RobotChallenge «Воздушные гонки».
Такой хороший шанс получить дополнительный опыт полетов и пообщаться с другими пилотами мы не могли упустить. Но времени на подготовку не было, пришлось импровизировать.
Цель соревнований — пролететь как можно больше правильных восьмерок за 10 минут. Согласно регламенту, в качестве помощи в навигации на полу была начерчена пунктирная линия. После некоторых раздумий мы решили использовать наш опыт висения над крестом. Только вместо координаты центра креста передавать в модуль управления дроном верхнюю видимую точку пунктира. В результате, дрон, как мул за морковкой, пытался зависнуть над этой точкой, а мы подсовывали ему следующую.
У нас было всего четыре часа времени на отладку на реальном полигоне накануне соревнований, но решение оказалось не только изящным, но и плодотворным – мы налетали пять кругов, получив приз за второе место.
На этих соревнованиях нас ждал очередной сюрприз – проблемы со связью. Из отведенных 10 минут на попытку мы больше половины времени потратили на установление связи с дроном — он терял ее в процессе полета, сбивался с маршрута. Приходилось его останавливать и начинать выполнение задания заново. В процессе общения с другими участниками выяснилось, что это стандартная проблема дронов Parrot.
Ролик, снятый на этих соревнованиях, мы использовали для прохождения КТ-3.
Фильтруй, и все получится
Вернувшись домой, мы приступили к следующему этапу – полетам между маркерами. После питерских соревнований стало ясно, что необходимо как можно больше летать на реальные расстояния в реальных условиях.
Мы договорились об использовании школьного спортзала на время летних каникул. Напечатали кресты в натуральную величину и опять были удивлены – по нижней камере определить большой крест невозможно, целиком его в нижнюю камеру просто не видно.
В очередной раз пришлось менять концепцию — мы вернулись к определению крестов по линиям. Алгоритм был следующим – сначала получаем все линии, потом начинаем объединять рваные и фильтровать их по контрастности, местоположению (кресты на потолке и стенах нам не нужны), отсекая все лишнее. После этого находим перекрестия и уже по ним пытаемся понять, похоже ли это на настоящие маркеры. То есть фильтруем, фильтруем и еще раз фильтруем. Это ужасно прожорливо по ресурсам, но зато достаточно надежно.
Исходное изображение:
Найденные линии:
Фильтр по контрастности:
Объединяем рваные линии:
Все пересечения:
Фильтр не похожих на крест:
Результат:
Взять почту, телефон, телеграф
Пришло время последней контрольной точки. По условиям соревнований, мы обязаны были пройти ее на полигоне организатора.
На пробный полет мы записались одними из первых. По приезде в КРОК нас ждал очередной сюрприз – к проблемам со связью добавился ветер. Наш дрон банально сдувало, а алгоритма противодействия порывам ветра у нас на тот момент не было. В результате, из двадцати попыток нам удалось выполнить задание КТ-4 только три раза. Спасибо организаторам, что они зачли нам эту попытку. Мы прошли КТ-4 первыми.
В попытках настроить алгоритм противодействия ветру мы в очередной раз столкнулись с проблемой связи. Проводя испытания на улице в ветреную погоду, мы чуть не разбили наш дрон, потеряв связь с ним.
Надо было что-то делать. Как мы уже знали, плохая связь — это общая проблема дронов Parrot. Поэтому мы воспользовались уже найденным до нас способом ее решения — установкой внешней антенны. Внешняя антенна и роутер позволили нам считать вопрос связи закрытым. Как позже выяснилось, многие команды с этой проблемой столкнулись только на соревнованиях.
За три недели до финала организаторы окончательно утвердили полигон. Всем участникам давалась возможность дважды посетить его для настройки алгоритмов.
Опахало для шашлыка
После первого посещения уже готового полигона у нас сложилось ощущение, что мы не выполним задание. У нас возникло три проблемы:
- Определение коридора. Разделительная перегородка была организована с использованием строительных блоков, которые вносили помехи в наш алгоритм определения стенок.
- Посадка в условиях ветра. Операцию посадки мы выполняли, можно сказать, с закрытыми глазами: мы находим крест, выцеливаем его и выполняем посадку (подлетаем на два-три метра и садимся). Однако любой порыв ветра сносит нас в сторону от площадки.
- Взлет и разворот в условиях ветра. Эту операцию мы тоже делали «на автомате» — в результате нас могло бросить ветром на стену (почему-то мы считали, что касаться стен запрещено условиями соревнований).
Попытка пролететь по лабиринту на ручном управлении по камере привела к столкновению со стеной и крушению. Вторая попытка привела к такому же результату.
Все, что мы сделали в первый приезд, – поснимали полигон в разное время — когда солнце было за облаками и не давало лишних теней и, наоборот – при ярком солнце и контрастных тенях.
За оставшуюся неделю мы доработали определение коридора, использовав подход «vanishing point».
Приехав во второй раз, за три дня до соревнований, нам удалось автоматически пролететь коридор в одну сторону, однако проблема посадки и взлета оставалась нерешенной.
У нас оставалось два дня. При этом было непонятно, как повторить условия порывистого ветра, чтобы выяснить, победили ли мы его?
В качестве способа борьбы с ветром мы использовали активное противодействие внешним воздействиям при посадке – стараясь удерживать углы крена, тангажа и рысканья. А взлет решили делать винтом – одновременно набирая высоту и разворачиваясь.
Отлаживали в спортзале, создавая порывы ветра с помощью листа ДВП. Выглядело все это довольно комично.
Я пью до дна...
23-го августа в 21:30, вернувшись из спортзала, мы подняли бокалы за то, что достойно прошли все этапы соревнования – теперь мы знали, что выполним задание. Точнее, что мы имеем хороший шанс его выполнить — Его Величество Случай никто не отменял.
Мы научились летать в коридоре, не сталкиваясь со стенами. Мы хорошо распознавали кресты в любую погоду. Оба креста (думаю, участники меня поймут). Проблемы связи и ветра также были решены.
Единственное, что мы не успели – это автоматический выбор направления маршрута. Для определения поворотов мы использовали правило правой/левой руки, которое переключали после каждой посадки. И это чуть не сыграло с нами злую шутку.
Ёжик в тумане
Уперевшись в стенку препятствия на обратном пути при выполнении полета, мы развернулись по правилу правой руки и полетели на уже посещенный маркер. После посадки мы переключились на левую руку. Долетев до последнего поворота, опять развернулись и снова полетели обратно. И только после третьей посадки опять включилось правило правой руки, и мы благополучно вернулись.
Мы понимали, что 6 мин 45 с, полученные нами в первой попытке, — проигрышное время — достаточно кому-либо просто выполнить задание. При этом правило правой/левой руки мы отменить не могли, и была вероятность, что дрон опять собьется и начнет кружить. Тогда на второй попытке мы решили «лететь на все деньги» и подняли скорость дрона в полтора раза. Но, к сожалению, забыли изменить параметр снижения скорости, зависящий от расстояния до препятствия, и не успели вовремя затормозить, окончательно остановившись об стену.
Для нас действительно было неожиданным, что больше никто не сможет пройти дистанцию. Полтора дня мы ждали, что вот-вот кто-то пролетит быстрее нас (у дрона организаторов было лучшее время, но они участвовали в соревнованиях вне зачета), и мы сможем уже расслабиться и отдохнуть, искренне желая успеха другим участникам. Но удача была капризна, и в этот раз она оказалась на нашей стороне.
Ниже запись полета со стороны дрона. Скорость распознавания была неравномерной, поэтому время на ролике не совпадает с реальностью.

