Доброго времени суток.
Пост и код приведённый ниже, предназначен не столько для использования алгоритма в рабочих целях, сколько для того, чтобы понять, как алгоритм fuzzy c-means работает и возможно, дать толчок к реализации этого алгоритма на других языках либо для усовершенствования приведённого кода и его дальнейшего использования в рабочих целях.
Для начала стоит очень быстро рассказать, что такое кластеризация и что особенного в нечёткой кластеризации.
Кластеризация, как описывает это слово Викисловарь,
Данное определение вполне понятное и я думаю не нуждается в дополнительном объяснении.
Что же тогда такое «нечёткая кластеризация»?
Нечёткую кластеризацию от просто кластеризации отличает то, что объекты, которые подвергаются кластеризации, относятся к конкретному кластеру с некой принадлежностью, а не однозначно, как это бывает при обычной кластеризации. Например, при нечёткой кластеризации объект A относится к кластеру K1 с принадлежностью 0.9, к кластеру K2 — с принадлежностью 0.04 и к кластеру К3 — с принадлежностью 0.06. При обычной же (чёткой) кластеризации объект А был бы отнесён к кластеру K1.
Математическое описание данного алгоритма Вы можете найти в данном хабрапосте.
Давайте перейдём непосредственно к реализации алгоритма. Для этого я бы рассмотрел реализацию на более-менее реальном примере. Таким примером может быть следующий — давайте кластеризируем пиксели по их RGB-значению, т.е. фактически по цвету. В итоге, мы сможем увидеть результат выполнения алгоритма наглядно.
Ниже приведён код алгоритма, который далее я разберу чуть подробнее.
Начнём рассмотрение алгоритма с функции, которая собственно и запускает сам алгоритм кластеризации —
Входными параметрами для неё являются массив кластеризируемых объектов(в нашем случае рандомно заполненный массив, содержащий об]екты класса Point) и коэффициент неопределённости. Возвращаемое значение — матрица принадлежности. Также был добавлен в функцию in/out параметр
Шаги по нахождению новых центров кластеров и пересчёте матрицы принадлежности ограничены константами MAX_EXECUTION_CYCLES и EPSILON, где MAX_EXECUTION_CYCLES — ограничивает количество шагов, EPSILON — ограничивает точность нахождения матрицы принадлежности.
Каждый шаг алгоритма таков:
1) рассчитываем центры кластеров с помощью функции
2) далее для каждого объекта рассчитываем Евклидово расстояние до центра каждого кластера (функция
3) рассчитываем коэффициент принадлежности
4) нормализуем коэффициенты
5) рассчитываем значение решающей функции (функция
6) далее сравнивается текущее значение решающей функции с предыдущим её значением и если их разница меньше установленного EPSILON, то алгоритм прекращает работу.
Теперь чуть подробнее о каждом шаге:
1) центры рассчитываются по следующей формуле

где wk(x) — коэффициент принадлежности, m — коэффициент неопределённости, x — объект (в самом алгоритме в качестве х выступают составляющие R, G, B)
2) Евклидово расстояние мы рассчитываем для 3х измерений, т.е. формула следующая:
где r,g,b — составляющие RGB
3) коэффициент принадлежности рассчитывается по формуле
где d — расстояние от объекта до центра кластера, m — коэффициент неопределённости.
4) нормализация всех коэффициентов принадлежности объекта — преобразуем коэффициенты, чтобы в сумме они давали 1, т.е. фактически делим каждый коэффициент на сумму всех коэффициентов данного объекта
5) решающая функция возвращает сумму всех Евклидовых расстояний каждого объекта к каждому центру кластера умноженному на коэффициент принадлежности
6) по модулю вычитаем предыдущее и текущее значение решающей функции, и если это разница меньше EPSILON — алгоритм прекращает и возвращается найденная матрица принадлежности.
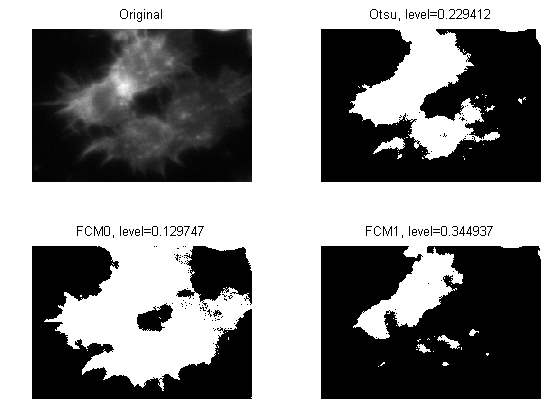
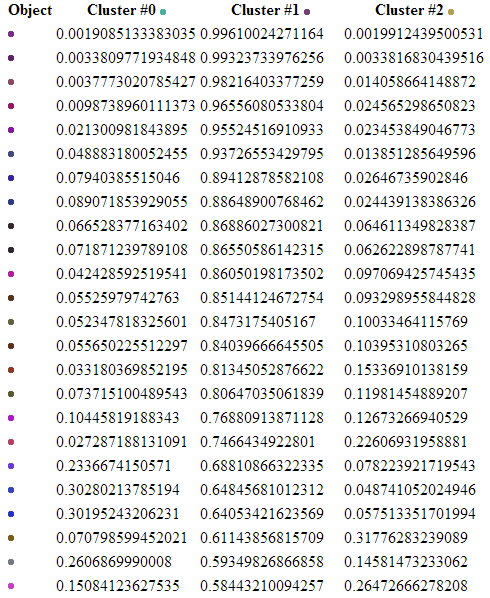
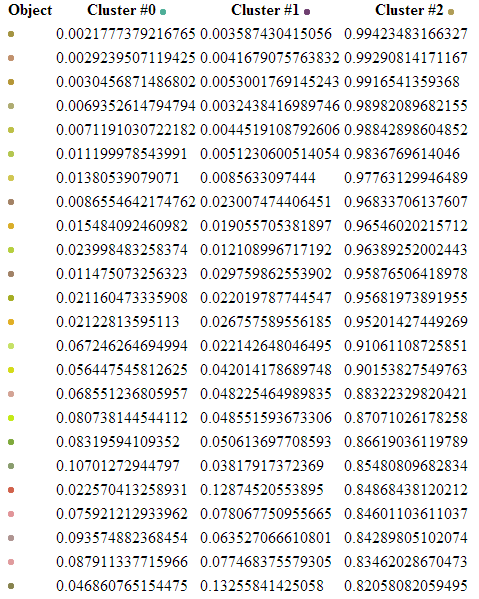
В конце хотелось бы добавить пару скриншотов, демонстрирующих результаты работы алгоритма.
На рисунках видно, что алгоритм отработал верно и отнём похожие по цветам точки к одним и тем же класстерам
Таким образом, я представил Вам базовую реализацию алгоритма нечёткой кластеризации fuzzy c-means. Надеюсь, она будет Вам полезна.
Спасибо за внимание.
Пост и код приведённый ниже, предназначен не столько для использования алгоритма в рабочих целях, сколько для того, чтобы понять, как алгоритм fuzzy c-means работает и возможно, дать толчок к реализации этого алгоритма на других языках либо для усовершенствования приведённого кода и его дальнейшего использования в рабочих целях.
Общие сведения
Для начала стоит очень быстро рассказать, что такое кластеризация и что особенного в нечёткой кластеризации.
Кластеризация, как описывает это слово Викисловарь,
группировка, разбиение множества объектов на непересекающиеся подмножества, кластеры, состоящие из схожих объектов
Данное определение вполне понятное и я думаю не нуждается в дополнительном объяснении.
Что же тогда такое «нечёткая кластеризация»?
Нечёткую кластеризацию от просто кластеризации отличает то, что объекты, которые подвергаются кластеризации, относятся к конкретному кластеру с некой принадлежностью, а не однозначно, как это бывает при обычной кластеризации. Например, при нечёткой кластеризации объект A относится к кластеру K1 с принадлежностью 0.9, к кластеру K2 — с принадлежностью 0.04 и к кластеру К3 — с принадлежностью 0.06. При обычной же (чёткой) кластеризации объект А был бы отнесён к кластеру K1.
Математическое описание данного алгоритма Вы можете найти в данном хабрапосте.
Реализация fuzzy c-means на PHP.
Давайте перейдём непосредственно к реализации алгоритма. Для этого я бы рассмотрел реализацию на более-менее реальном примере. Таким примером может быть следующий — давайте кластеризируем пиксели по их RGB-значению, т.е. фактически по цвету. В итоге, мы сможем увидеть результат выполнения алгоритма наглядно.
Ниже приведён код алгоритма, который далее я разберу чуть подробнее.
Реализация алгоритма fuzzy c-means для кластеризации точек по их RGB-значению
define('EPLSION', 0.1); define('MAX_EXECUTION_CYCLES', 150); define('POINTS_COUNT', 100); define('CLUSTERS_NUM', 3); define('FUZZ', 1.5); class Point { public $r; public $g; public $b; } // Random values 0 - 1 function random_float ($min,$max) { return ($min+lcg_value()*(abs($max-$min))); } // Fuzzy C Means Algorithm function distributeOverMatrixU($arr, $m, &$centers) { $centers = generateRandomPoints(CLUSTERS_NUM); $MatrixU = fillUMatrix(count($arr), count($centers)); $previousDecisionValue = 0; $currentDecisionValue = 1; for($a = 0; $a < MAX_EXECUTION_CYCLES && (abs($previousDecisionValue - $currentDecisionValue) > EPLSION); $a++){ $previousDecisionValue = $currentDecisionValue; $centers = calculateCenters($MatrixU, $m, $arr); foreach($MatrixU as $key=>&$uRow){ foreach($uRow as $clusterIndex=>&$u){ $distance = evklidDistance3D($arr[$key], $centers[$clusterIndex]); $u = prepareU($distance, $m); } $uRow = normalizeUMatrixRow($uRow); } $currentDecisionValue = calculateDecisionFunction($arr, $centers, $MatrixU); } return $MatrixU; } function fillUMatrix($pointsCount, $clustersCount) { $MatrixU = array(); for($i=0; $i<$pointsCount; $i++){ $MatrixU[$i] = array(); for($j=0; $j<$clustersCount; $j++){ $MatrixU[$i][$j] = random_float(0, 1); } $MatrixU[$i] = normalizeUMatrixRow($MatrixU[$i]); } return $MatrixU; } function calculateCenters($MatrixU, $m, $points) { $MatrixCentroids = array(); for($clusterIndex=0; $clusterIndex < CLUSTERS_NUM; $clusterIndex++){ $tempAr = 0; $tempBr = 0; $tempAg = 0; $tempBg = 0; $tempAb = 0; $tempBb = 0; foreach($MatrixU as $key=>$uRow){ $tempAr += pow($uRow[$clusterIndex],$m); $tempBr += pow($uRow[$clusterIndex],$m) * $points[$key]->r; $tempAg += pow($uRow[$clusterIndex],$m); $tempBg += pow($uRow[$clusterIndex],$m) * $points[$key]->g; $tempAb += pow($uRow[$clusterIndex],$m); $tempBb += pow($uRow[$clusterIndex],$m) * $points[$key]->b; } $MatrixCentroids[$clusterIndex] = new Point(); $MatrixCentroids[$clusterIndex]->r = $tempBr / $tempAr; $MatrixCentroids[$clusterIndex]->g = $tempBg / $tempAg; $MatrixCentroids[$clusterIndex]->b = $tempBb / $tempAb; } return $MatrixCentroids; } function calculateDecisionFunction($MatrixPointX, $MatrixCentroids, $MatrixU) { $sum = 0; foreach($MatrixU as $index=>$uRow){ foreach($uRow as $clusterIndex=>$u){ $sum += $u * evklidDistance3D($MatrixCentroids[$clusterIndex], $MatrixPointX[$index]); } } return $sum; } function evklidDistance3D($pointA, $pointB) { $distance1 = pow(($pointA->r - $pointB->r),2); $distance2 = pow(($pointA->g - $pointB->g),2); $distance3 = pow(($pointA->b - $pointB->b),2); $distance = $distance1 + $distance2 + $distance3; return sqrt($distance); } function normalizeUMatrixRow($MatrixURow) { $sum = 0; foreach($MatrixURow as $u){ $sum += $u; } foreach($MatrixURow as &$u){ $u = $u/$sum; } return $MatrixURow; } function prepareU($distance, $m) { return pow(1/$distance , 2/($m-1)); } function generateRandomPoints($count){ $points = array_fill(0, $count, false); array_walk($points, function(&$value, $key){ $value = new Point(); $value->r = rand(20, 235); $value->g = rand(20, 235); $value->b = rand(20, 235); }); return $points; } $points = generateRandomPoints(POINTS_COUNT); $centers = array(); $matrixU = distributeOverMatrixU($points, FUZZ, $centers);
Начнём рассмотрение алгоритма с функции, которая собственно и запускает сам алгоритм кластеризации —
distributeOverMatrixUВходными параметрами для неё являются массив кластеризируемых объектов(в нашем случае рандомно заполненный массив, содержащий об]екты класса Point) и коэффициент неопределённости. Возвращаемое значение — матрица принадлежности. Также был добавлен в функцию in/out параметр
centers, в котором после выполнения алгоритма будут центры наших кластеров.Шаги по нахождению новых центров кластеров и пересчёте матрицы принадлежности ограничены константами MAX_EXECUTION_CYCLES и EPSILON, где MAX_EXECUTION_CYCLES — ограничивает количество шагов, EPSILON — ограничивает точность нахождения матрицы принадлежности.
Каждый шаг алгоритма таков:
1) рассчитываем центры кластеров с помощью функции
calculateCenters2) далее для каждого объекта рассчитываем Евклидово расстояние до центра каждого кластера (функция
evklidDistance3D — пространство 3х мерное у нас)3) рассчитываем коэффициент принадлежности
u для данного объекта (функция prepareU)4) нормализуем коэффициенты
u для данного объекта (функция normalizeUMatrixRow)5) рассчитываем значение решающей функции (функция
calculateDecisionFunction) 6) далее сравнивается текущее значение решающей функции с предыдущим её значением и если их разница меньше установленного EPSILON, то алгоритм прекращает работу.
Теперь чуть подробнее о каждом шаге:
1) центры рассчитываются по следующей формуле
где wk(x) — коэффициент принадлежности, m — коэффициент неопределённости, x — объект (в самом алгоритме в качестве х выступают составляющие R, G, B)
2) Евклидово расстояние мы рассчитываем для 3х измерений, т.е. формула следующая:
r = sqrt((r2-r1)^2 + (g2-g1)^2 + (b2-b1)^2);где r,g,b — составляющие RGB
3) коэффициент принадлежности рассчитывается по формуле
u = (1/d)^(2/(m-1)),где d — расстояние от объекта до центра кластера, m — коэффициент неопределённости.
4) нормализация всех коэффициентов принадлежности объекта — преобразуем коэффициенты, чтобы в сумме они давали 1, т.е. фактически делим каждый коэффициент на сумму всех коэффициентов данного объекта
5) решающая функция возвращает сумму всех Евклидовых расстояний каждого объекта к каждому центру кластера умноженному на коэффициент принадлежности
6) по модулю вычитаем предыдущее и текущее значение решающей функции, и если это разница меньше EPSILON — алгоритм прекращает и возвращается найденная матрица принадлежности.
В конце хотелось бы добавить пару скриншотов, демонстрирующих результаты работы алгоритма.
На рисунках видно, что алгоритм отработал верно и отнём похожие по цветам точки к одним и тем же класстерам
Демонстрация работы алгоритма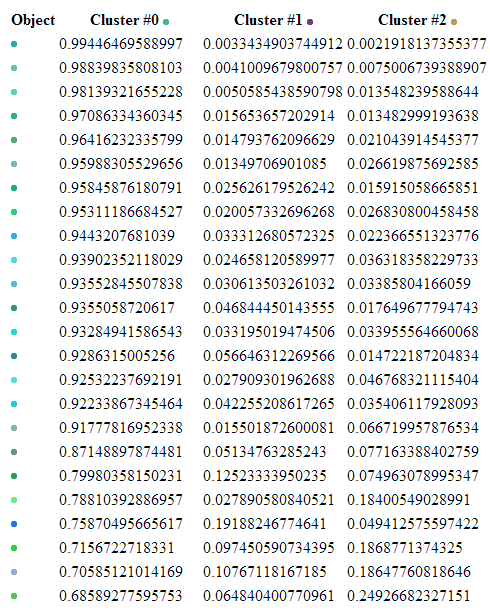
Таким образом, я представил Вам базовую реализацию алгоритма нечёткой кластеризации fuzzy c-means. Надеюсь, она будет Вам полезна.
Спасибо за внимание.

