Это перевод. Статья опубликована 27 мая 2018 года

Фитнес-трекер до и после разборки
Когда я пришёл в нынешнюю компанию, мне в первый день любезно выдали набор подарков. Среди них оказался этот браслет с фитнес-трекером. Независимо от вашей любви к физическим упражнениям это невероятно крутой гаджет с чисто технической точки зрения:
Снаружи на задней панели единственный идентификатор — это наклейка «FCC ID: 2AHFTID115». Если погуглить, то это вроде как соответствует устройству ID115 и можно даже найти несколько фотографий его внутренностей. Оглядываясь назад, на одной из этих фотографий, если сильно постараться, можно разглядеть название самой крупной интегральной схемы (IC): N51822. Это говорит о том, что здесь может быть микроконтроллер (MCU) nRF51822 от Nordic, 32-битный процессор ARM M0 со встроенной поддержкой BLE, который теоретически достаточно легко запрограммировать на другие вещи, которые должен делать браслет.
Прежде чем разобрать гаджет, я ещё немного погуглил и узнал, что в некоторых похожих браслетах установлен такой же чип, и люди успешно его программировали.
Открыть корпус оказалось не так-то просто. Чёрная пластиковая крышка приклеена к серому заднику. Я попробовал фен, чтобы размягчить клей, и терпеливо резал его маленьким ножичком, стараясь не слишком повредить пластик. После вскрытия я убедился, что там действительно nRF51822. Позже я купил практически идентичный браслет с MCU от Texas Instrument. Имейте в виду, что есть варианты.

nRF51822 и шариковая ручка для масштаба
В документации говорится, что чип можно запрограммировать/отладить с помощью двухконтактного интерфейса ARM Serial Wire Debug (SWD). Если мы хотим установить канал коммуникации с чипом, то это означает две вещи:
К счастью, на плате есть несколько доступных контактных площадок. Хотя их существование явно объясняется необходимостью отладки, тестирования и проверки, я предпочитаю думать, что какой-то классный инженер оставил их там как маленькие подарки для таких как мы. Не все они должным образом помечены, поэтому предлагаю такие коды:


Передняя и обратная стороны печатной платы. Шариковая ручка для масштаба и полупроизвольные названия для открытых контактных площадок
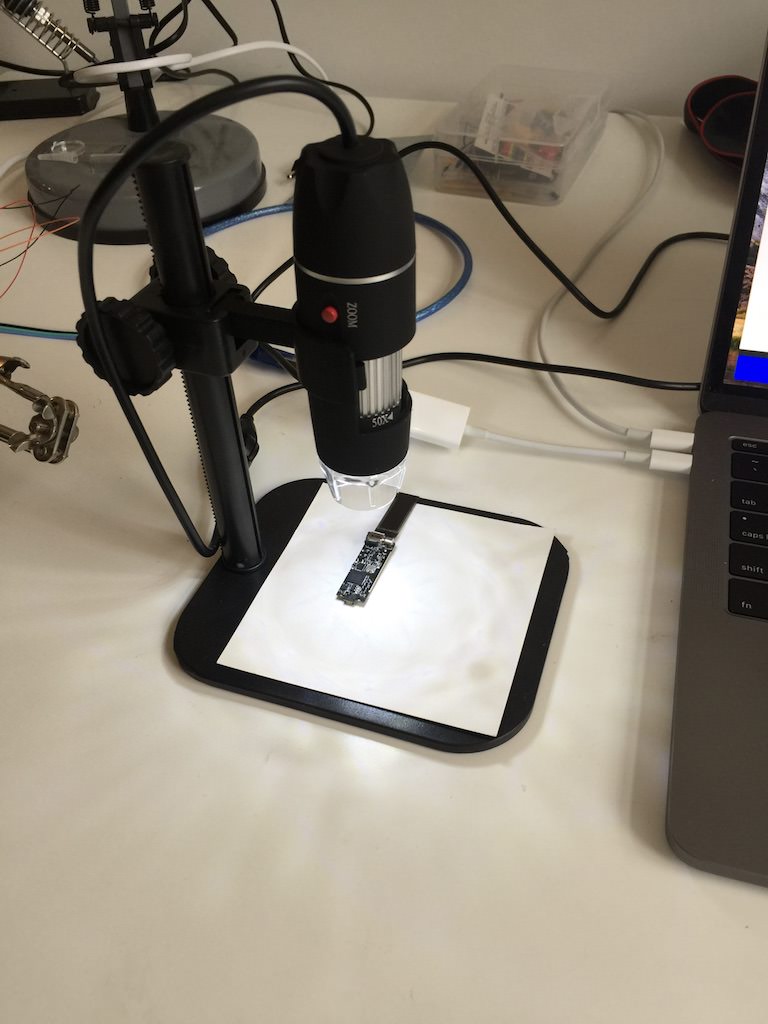
С помощью такого же дешёвого USB-микроскопа я сделал несколько снимков передней и обратной сторон платы и попытался отследить дорожки от микроконтроллера до контактных площадок.


Дорожки к контактам SWDIO и SWDCLK на передней и задней сторонах платы
Обратите внимание, что это многослойная печатная плата со сквозными отверстиями, поэтому следует проверять дорожки с обеих сторон платы. По этим фотографиям можно отследить дорожки от контактов SWDIO и SWDCLK на чипе до контактных площадок IO и CLK. Так мы убедимся, что пометка CLK на плате соответствует SWDCLK на MCU, а непомеченный контакт — это вывод SWDIO. Теперь можно подготовить нашу первую таблицу сопоставления:
Получив доступ к двум контактным площадкам SWD, я припаял очень тонкие проводки к ним и ко всем остальным доступным контактам.

Следующая задача — попытаться запрограммировать устройство на какую-нибудь задачу. Чтобы запустить простейшую программу, мы должны убедиться в следующем:
В качестве “hello, world” в данном случае может выступить программа, включающая и выключающая светодиод. И даже это не элементарно, потому что на плате нет встроенного светодиода, а если добавить внешний, то всё равно нужно выяснить, к чему его подключать. Это добавляет ещё одно измерение в пространственную модель проблемы. Согласно теореме об отсутствии бесплатного сыра я просто подключил два светодиода на контакты

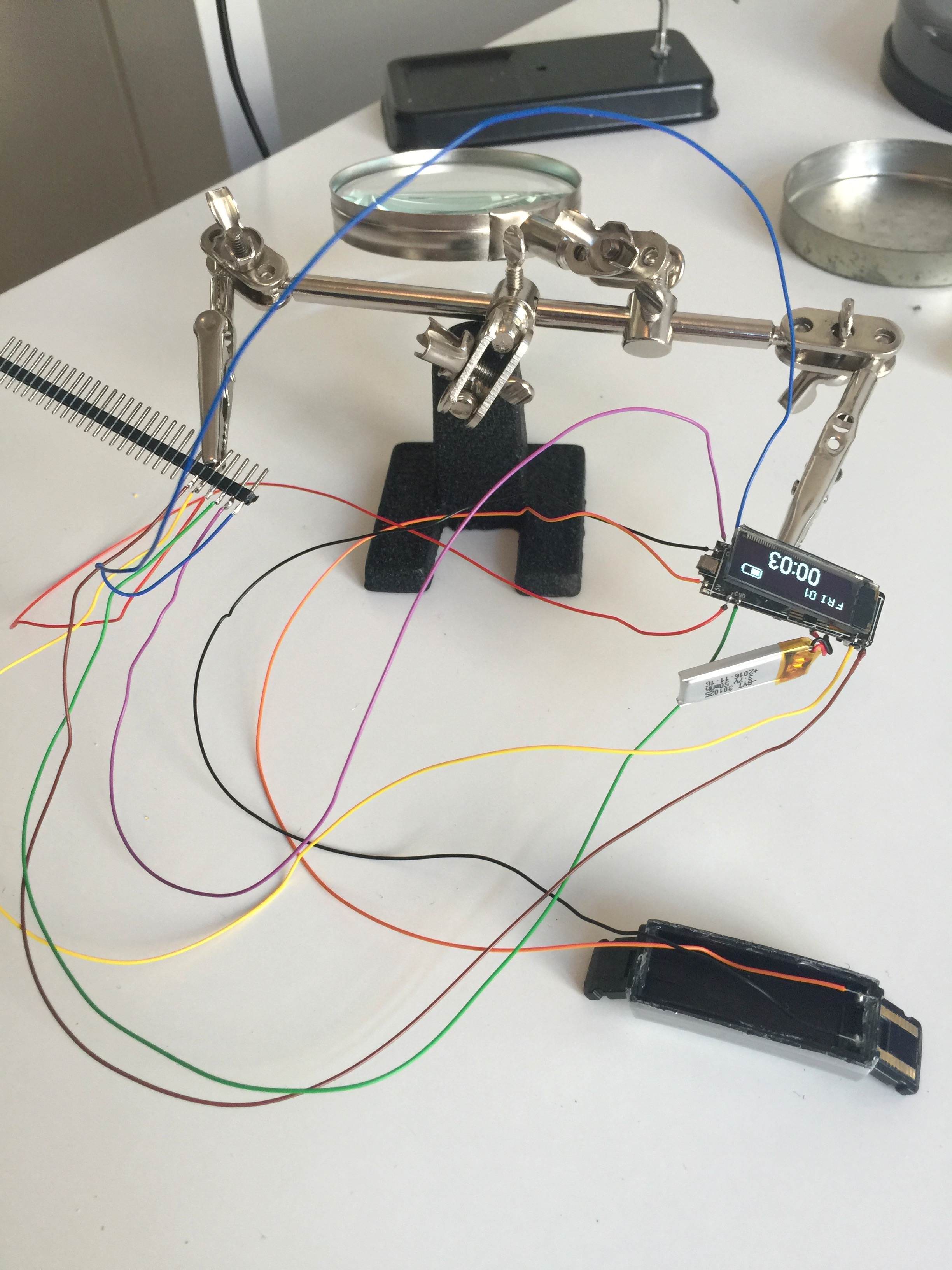
День плохих проводов
Драйверы и программы командной строки для программатора J-Link SWD лежат на сайте Segger. Если вы на macOS и используете Homebrew, то ищите формулу Cask в
Затем я скачал Nordic nRF5 SDK (я использую версию 12.3.0). Из примеров SDK понятно, что нам понадобится компилятор, способный компилировать программы Arm. Поэтому я установил ещё
Изучив документацию SDK и форумы разработчиков Nordic, я выяснил, что их SDK чаще всего используют с платами разработки вроде этой. SDK предварительно сконфигурирован для нескольких вариантов таких плат. Поскольку мы контачим непосредственно с контроллером, то придётся настроить некоторые параметры SDK.
Я потратил много времени на понимание экосистемы nRF5, но в конце концов всё-таки смог запустить программу на чипе! На видео показаны два мигающих светодиода. На данном этапе я создал репозиторий Github и сбросил туда программу с рабочим
Как я уже говорил, задача с миганием светодиодов предусматривала некоторые надежды и метод тыка, какие из контактов MCU ведут к
Итак, метод тыка дополнил таблицу:
Способность передавать данные на компьютер незаменима при отладке. Программатор J-Link поддерживает передачу в реальном времени (RTT) как для отправки, так и для получения данных с чипа. Чтобы использовать RTT, нужно сделать
Ещё одна сложная задача — заставить работать OLED. В самых распространённых OLED на рынке работает драйвер/контроллер ssd1306, и обычно коммуникация с MCU осуществляется по последовательному интерфейсу, используя или SPI, или I²C. Вот пример от Adafruit.
Я не нашёл такой дисплей ни в одном из обычных магазинов. И размер 96×32 у него нестандартный. Поиск по идентификатору QT1316P01A на дисплее выдаёт китайские сайты типа Aliexpress, но там нет никакой документации, кроме наименований выводов:

Именования выводов OLED с Aliexpress
Если список не врёт, то контакты


Дорожки контактов данных OLED
Обновляем таблицу соответствий:
Протокол I²C гораздо более продвинутый, чем какой-нибудь простой последовательный протокол вроде UART. Одно из преимуществ в том, что он поддерживает по несколько устройств master и slave на одной шине. Это немного усложняет дело: как минимум, нужно сказать MCU, для какого slave подаются команды. Так что на высоком уровне кроме физических контактов есть ещё «логический» адрес OLED-дисплея.
К счастью, один из примеров в nRF5 SDK — это сканер I²C. Он опрашивает со все возможные логические адреса и сообщает, если там что-то установлено. Моя модифицированная версия здесь. Он выдаёт такой лог:
Отличная новость! У нас есть веские основания полагать, что дисплей правильно идентифицирован и это действительно вариант I²C. Поиск в гугле говорит, что
Теперь мы готовы отправить какие-то пиксели на дисплей. На этом уровне нет абстракции через библиотеку. В документации ssd1306 можно найти низкоуровневый способ передачи данных. Процесс состоит из последовательности команд конфигурации, которые устанавливают ориентацию дисплея, режим записи, размер и т.д. Затем в графическую память дисплея (GDDRAM) отправляется последовательность байт, которые отображаются на экране.
Для правильной конфигурации я изучил библиотеку ssd1306 от Adafruit и попытался эмулировать подобные команды. Именно на это ушла львиная часть времени в данном проекте. Узнать все детали оказалось весьма трудоёмким занятием, и всё равно некоторые вещи я не могу объяснить. Тем не менее, оно работает!

Отображение жёстко закодированного растрового рисунка
Код этого примера здесь.
С такими настройками дисплей делится на 4 строки (страницы) и 96 столбцов. Так что страницы по 8 пикселей в высоту. Первый отправленный байт расположится «вертикально» в первом столбце первой страницы. Второй байт займёт второй столбец, затем третий и так далее, вплоть до 96-го столбца, когда он возвращается и начинает с первого столбца на второй странице.
Таково ожидаемое поведение. Как показано на видео, наблюдаемое поведение отличается: сначала заполняются нечётные столбцы, затем чётные, и только потом он возвращается ко второй странице.
Я потратил немало времени, чтобы понять причину столь глупого поведения дисплея, а затем ещё некоторое время на настройку конфигурации, чтобы исправить это. В конце концов, я проглотил свою гордость и всё-таки реализовал в программе такую странную логику рендеринга, чтобы закончить на этом.
Копаясь в библиотеке ssd1306 от Adafruit для Arduino, я всё время думал, что хорошо бы иметь способ «имитации» специфичных битов Arduino, чтобы протестировать их на nRF51822. Оказывается, гораздо более опытные люди тоже думали на эту тему — именно это делает удивительный проект sandeepmistry/arduino-nRF5. Он реализует основные библиотеки Arduino с помощью nRF5 SDK.
С помощью этого проекта мы можем открыть Arduino IDE, выбрать плату nRF5 — и использовать богатую экосистему Arduino. Я форкнул проект и добавил поддержку платы из нашего браслета. Его можно выбрать в раскрывающемся меню


Библиотека ssd1306 от Adafruit в оригинальном виде (вверху) и с патчем (внизу)
Это также означает, что теперь мы можем использовать библиотеку OLED от Adafruit. К моему удивлению и облегчению, произошло то же самое странное поведение с заполнением сначала нечётных, а потом чётных столбцов OLED! Я с удовольствием форкнул библиотеку и внедрил тот же хак. По сравнению с низкоуровневым подходом, теперь у нас есть доступ к разнообразным классным абстракциям, например, выводу текста:

Более привычный “Hello, world!”
Кроме цифровых сигналов «включить/выключить», у nRF51822 есть 10 контактов для аналогового ввода. Это полезно, например, для чтения текущего заряда аккумулятора. Судя по документации, чтение аналоговых контактов выдаёт 10-битное значение. Поэтому если на входе находится
Я периодически считывал значения аналоговых входов и составил графики самых интересных сигналов:
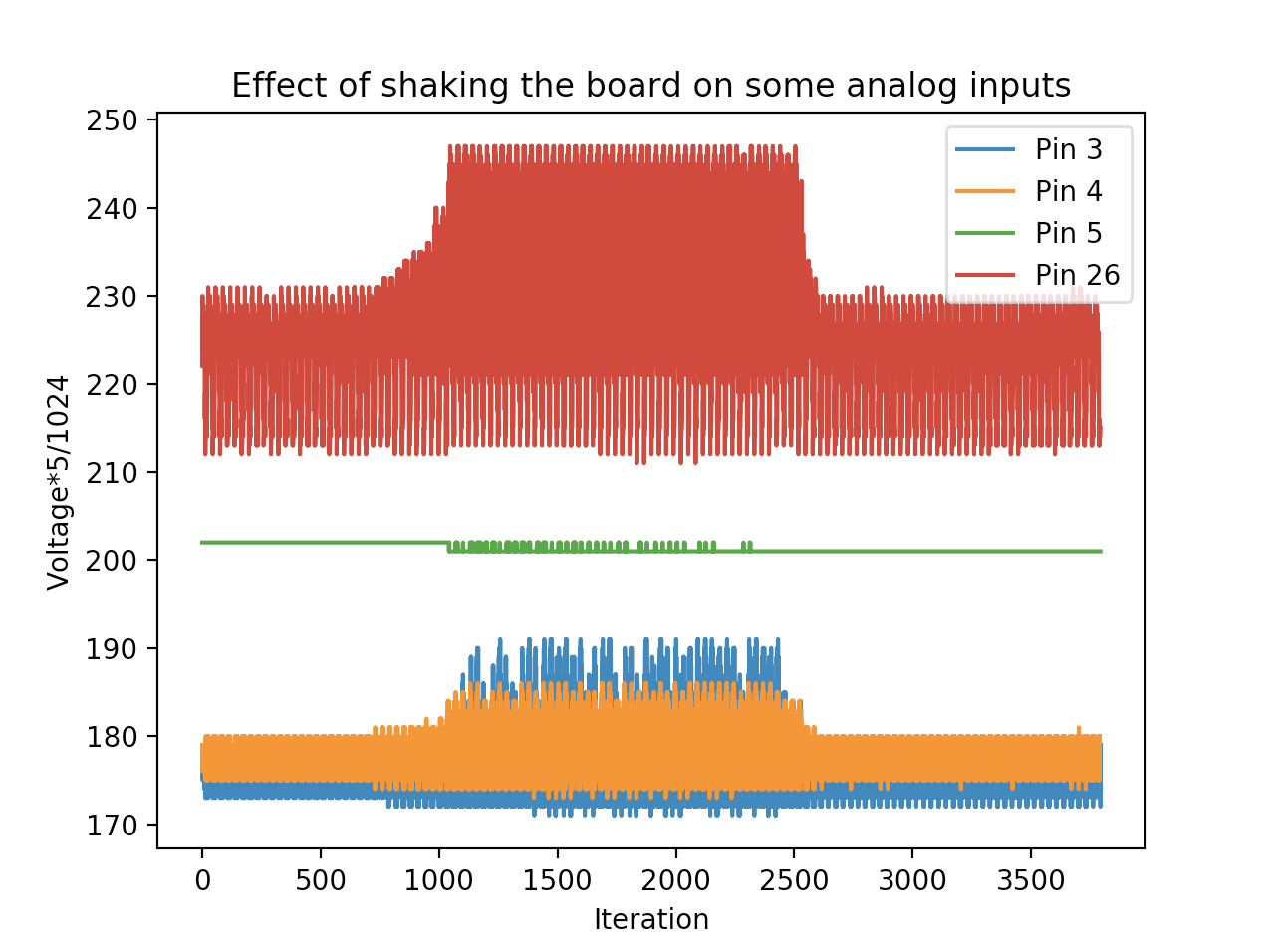

Эффект встряхивания платы и зарядки аккумулятора по данным с аналоговых входов
Я убеждён, что контакт
Код можно найти в этом наброске. Исходные данные и скрипт построения графика здесь. Теперь можно добавить несколько строк в нашу таблицу соответствия:
В оригинальной прошивке прикосновение к браслету в определённой точке включает дисплей. При удержании этой точки запускается хронометр, если я правильно помню. Это не физическая кнопка, а какая-то ёмкостная сенсорная штука, которая работает на удивление хорошо. Используя тот же подход, что для поиска цифровых выходов, я нашёл место подключения к MCU (видео).
Код лежит здесь.
Функциональность BLE на чипах nRF5 реализована через нечто под названием SoftDevice. Это предварительно скомпилированный двоичный файл со стеком BLE. Он прошивается независимо от приложения. Есть много версий SoftDevice, в зависимости от версии SDK и версии чипа.
В документации приводится некая матрица зависимости (к сожалению, на неё нельзя поставить прямую ссылку). Она показывает, с какой SDK поставляются разные версии чипа — и какая там стоит версия SoftDevice. В нашем случае на чипе стоит отметка QFAAH0, у этой микросхемы 256 КБ флэш-памяти, 16 КБ оперативной памяти и заявлена совместимость с SoftDevice s130.
Мой SDK версии 12.3 уже содержит несколько примеров использования SoftDevice s130. По сравнению с предыдущими программами, которые прямо зашиваются в микросхемы с адреса
Пожалуй, самое простое приложение для Bluetooth — превращение устройства в маячок. Устройство только транслирует своё присутствие. Один из таких примеров есть в SDK под названием
Здесь тоже низкоуровневая коммуникация с чипом всё усложняет по сравнению с программированием через SDK. Кроме настройки размера оперативной памяти (это знание тяжко мне далось в примере со светодиодами), выявилась ещё одна трудно отслеживаемая проблема. Как оказалось, для выполнения чувствительных ко времени задач стек BLE использует генератор тактовой частоты. В примерах SDK предполагается наличие внешнего кварцевого генератора. Когда я это понял после тысяч попыток
Когда пример BLE заработал с nRF5 SDK, зная о ловушках с оперативной памятью и генератором, я снова посмотрел на среду Arduino. И опять там оказался славный проект sandeepmistry/arduino-BLEPeripheral (от того же парня, что и arduino-nRF5!), который обеспечивает отличные абстракции поверх внутренней настройки BLE.
К моему удивлению, не пришлось даже форкать библиотеку. Автор проекта arduino-nrf5 потратил время и добавил конфигурацию всех плат и настроек, так что теперь выбор правильного генератора тактовых импульсов для SoftDevice сводится к простому выбору из выпадающего меню
После возни с этой платой бесчисленные часы в течение нескольких недель у меня чешутся руки засунуть её подальше за стиральную машину и забыть на некоторое время.
Фитнес-трекер до и после разборки
Когда я пришёл в нынешнюю компанию, мне в первый день любезно выдали набор подарков. Среди них оказался этот браслет с фитнес-трекером. Независимо от вашей любви к физическим упражнениям это невероятно крутой гаджет с чисто технической точки зрения:
- действительно маленький форм-фактор (примерно 15×40 мм);
- Bluetooth low energy (BLE);
- OLED-дисплей (96×32 пикселя);
- аккумулятор;
- USB-зарядка;
- акселерометр;
- вибромотор;
- цена около $10 (!).
Снаружи на задней панели единственный идентификатор — это наклейка «FCC ID: 2AHFTID115». Если погуглить, то это вроде как соответствует устройству ID115 и можно даже найти несколько фотографий его внутренностей. Оглядываясь назад, на одной из этих фотографий, если сильно постараться, можно разглядеть название самой крупной интегральной схемы (IC): N51822. Это говорит о том, что здесь может быть микроконтроллер (MCU) nRF51822 от Nordic, 32-битный процессор ARM M0 со встроенной поддержкой BLE, который теоретически достаточно легко запрограммировать на другие вещи, которые должен делать браслет.
Прежде чем разобрать гаджет, я ещё немного погуглил и узнал, что в некоторых похожих браслетах установлен такой же чип, и люди успешно его программировали.
Открыть корпус оказалось не так-то просто. Чёрная пластиковая крышка приклеена к серому заднику. Я попробовал фен, чтобы размягчить клей, и терпеливо резал его маленьким ножичком, стараясь не слишком повредить пластик. После вскрытия я убедился, что там действительно nRF51822. Позже я купил практически идентичный браслет с MCU от Texas Instrument. Имейте в виду, что есть варианты.
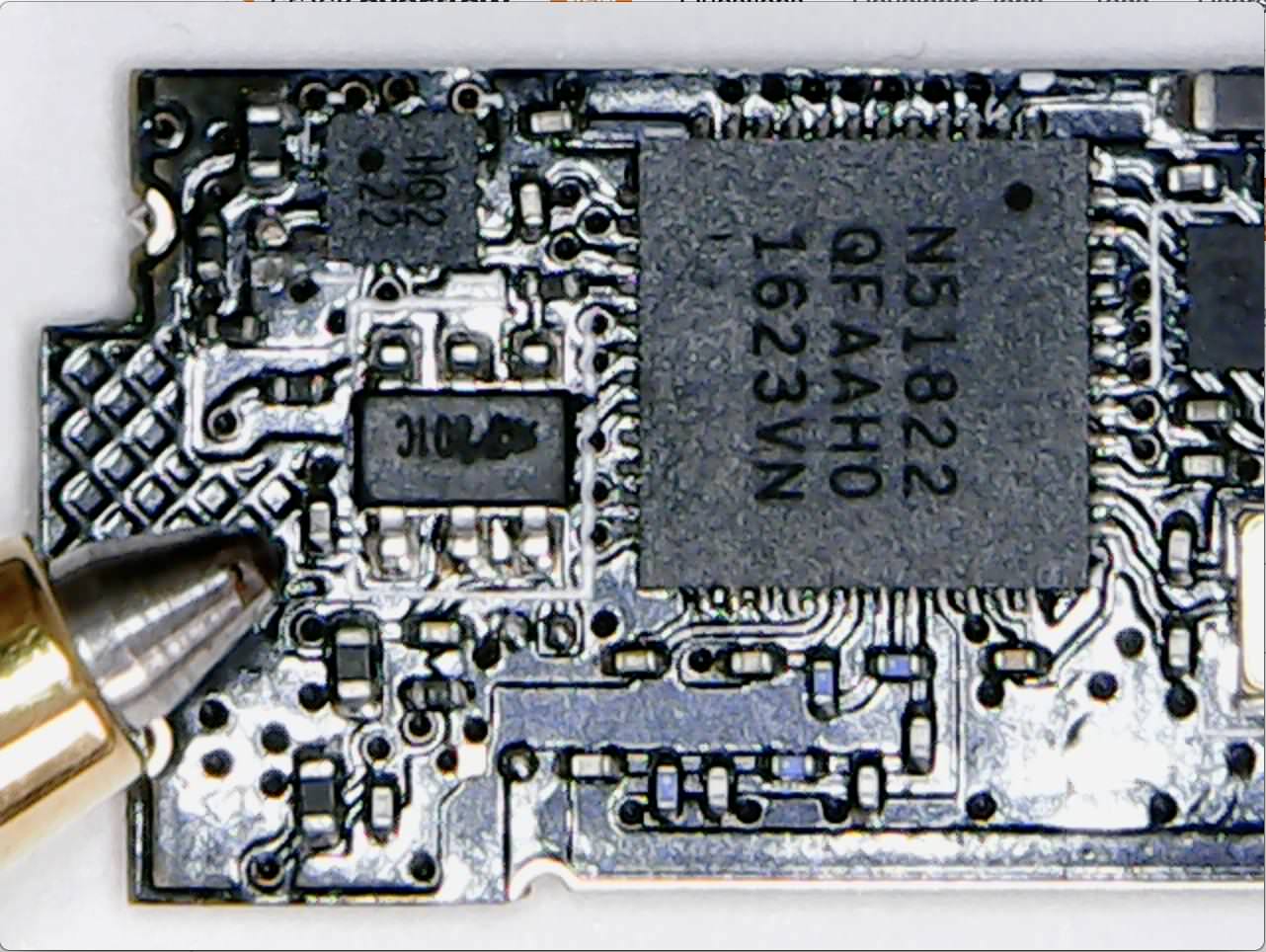
nRF51822 и шариковая ручка для масштаба
Поиск способа коммуникации
В документации говорится, что чип можно запрограммировать/отладить с помощью двухконтактного интерфейса ARM Serial Wire Debug (SWD). Если мы хотим установить канал коммуникации с чипом, то это означает две вещи:
- Нам понадобится программатор SWD (например, Segger J-Link).
- Нам понадобится доступ к двум контактам SWD на микроконтроллере, а именно SWDIO (данные) и SWDCLK (тактовые импульсы).
К счастью, на плате есть несколько доступных контактных площадок. Хотя их существование явно объясняется необходимостью отладки, тестирования и проверки, я предпочитаю думать, что какой-то классный инженер оставил их там как маленькие подарки для таких как мы. Не все они должным образом помечены, поэтому предлагаю такие коды:
Передняя и обратная стороны печатной платы. Шариковая ручка для масштаба и полупроизвольные названия для открытых контактных площадок
С помощью такого же дешёвого USB-микроскопа я сделал несколько снимков передней и обратной сторон платы и попытался отследить дорожки от микроконтроллера до контактных площадок.
Дорожки к контактам SWDIO и SWDCLK на передней и задней сторонах платы
Обратите внимание, что это многослойная печатная плата со сквозными отверстиями, поэтому следует проверять дорожки с обеих сторон платы. По этим фотографиям можно отследить дорожки от контактов SWDIO и SWDCLK на чипе до контактных площадок IO и CLK. Так мы убедимся, что пометка CLK на плате соответствует SWDCLK на MCU, а непомеченный контакт — это вывод SWDIO. Теперь можно подготовить нашу первую таблицу сопоставления:
| Вывод nRF51822 | Площадка | Описание |
|---|---|---|
| SWDIO | IO | Вывод данных для программирования SWD |
| SWDCLK | CLK | Вывод тактовой частоты для программирования SWD |
Хирургия после вскрытия
Получив доступ к двум контактным площадкам SWD, я припаял очень тонкие проводки к ним и ко всем остальным доступным контактам.
Немного поморгаем
Следующая задача — попытаться запрограммировать устройство на какую-нибудь задачу. Чтобы запустить простейшую программу, мы должны убедиться в следующем:
- Мы правильно отследили контакты SWDIO/SWDCLK.
- Программатор SWD работает, и компьютер может подавать команды.
- Мы можем скомпилировать программу Arm и корректно использовать Nordic SDK.
- Мы можем прошить скомпилированную программу в чип.
- Чип правильно работает и загружает нашу программу.
В качестве “hello, world” в данном случае может выступить программа, включающая и выключающая светодиод. И даже это не элементарно, потому что на плате нет встроенного светодиода, а если добавить внешний, то всё равно нужно выяснить, к чему его подключать. Это добавляет ещё одно измерение в пространственную модель проблемы. Согласно теореме об отсутствии бесплатного сыра я просто подключил два светодиода на контакты
P1 и P2 с надеждой, что мы сможем добраться до этих контактных площадок с MCU.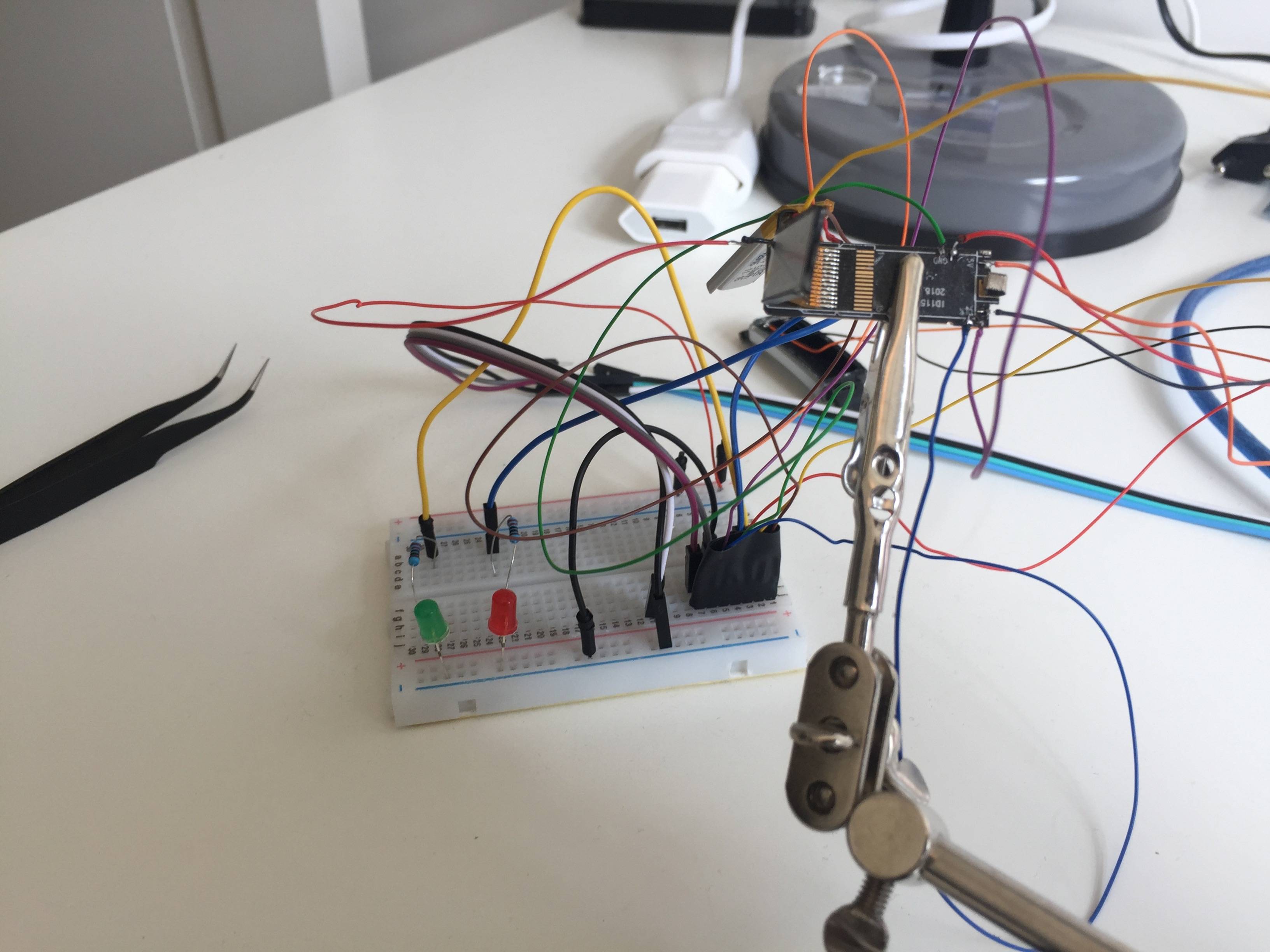
День плохих проводов
Драйверы и программы командной строки для программатора J-Link SWD лежат на сайте Segger. Если вы на macOS и используете Homebrew, то ищите формулу Cask в
caskroom/drivers/segger-jlink. Связь с программатором SWD устанавливается из утилиты командной строки JLinkExe.Затем я скачал Nordic nRF5 SDK (я использую версию 12.3.0). Из примеров SDK понятно, что нам понадобится компилятор, способный компилировать программы Arm. Поэтому я установил ещё
gcc-arm-embedded (тоже доступный на Homebrew).Изучив документацию SDK и форумы разработчиков Nordic, я выяснил, что их SDK чаще всего используют с платами разработки вроде этой. SDK предварительно сконфигурирован для нескольких вариантов таких плат. Поскольку мы контачим непосредственно с контроллером, то придётся настроить некоторые параметры SDK.
Я потратил много времени на понимание экосистемы nRF5, но в конце концов всё-таки смог запустить программу на чипе! На видео показаны два мигающих светодиода. На данном этапе я создал репозиторий Github и сбросил туда программу с рабочим
Makefile. Одним из самых главных секретов стало то, что на самом деле есть несколько вариантов nRF51822, а в моём всего лишь 16 КБ памяти. Так что пришлось ещё подправить скрипт компоновщика.Цифровой ввод-вывод
Как я уже говорил, задача с миганием светодиодов предусматривала некоторые надежды и метод тыка, какие из контактов MCU ведут к
P1 и P2, где подключены светодиоды. Простейшая стратегия — подключать все выводы по очереди и поочередно подавать высокое и низкое напряжение. К моему удивлению, оба светодиода загорелись! Ещё больше я удивился, когда заработал вибромотор!Итак, метод тыка дополнил таблицу:
| Вывод nRF51822 | Площадка | Описание |
|---|---|---|
| P0.30 | P1 | Цифровой GPIO |
| P0.00 | P2 | Цифровой GPIO |
| P0.01 | - | Вибродвигатель |
printf
Способность передавать данные на компьютер незаменима при отладке. Программатор J-Link поддерживает передачу в реальном времени (RTT) как для отправки, так и для получения данных с чипа. Чтобы использовать RTT, нужно сделать
#include "SEGGER_RTT.h" и вызвать SEGGER_RTT_WriteString(). Для получения данных на компьютере вызовите интерфейс командной строки jlinkrttlogger, который поставляется в комплекте J-Link.OLED
Ещё одна сложная задача — заставить работать OLED. В самых распространённых OLED на рынке работает драйвер/контроллер ssd1306, и обычно коммуникация с MCU осуществляется по последовательному интерфейсу, используя или SPI, или I²C. Вот пример от Adafruit.
Я не нашёл такой дисплей ни в одном из обычных магазинов. И размер 96×32 у него нестандартный. Поиск по идентификатору QT1316P01A на дисплее выдаёт китайские сайты типа Aliexpress, но там нет никакой документации, кроме наименований выводов:
Именования выводов OLED с Aliexpress
Если список не врёт, то контакты
SCL, SDA и RES# указывают нам, что это вариант I²C. Если дорожки между тремя выводами nRF51822 и этими тремя выводами OLED, то мы сделаем шаг вперёд. Вернёмся к микроскопу.Дорожки контактов данных OLED
Обновляем таблицу соответствий:
| Вывод nRF51822 | Площадка | Описание |
|---|---|---|
| P0.21 | - | Вывод OLED SDA |
| P0.22 | - | Вывод OLED SCL |
| P0.24 | - | Вывод OLED RES# |
Протокол I²C гораздо более продвинутый, чем какой-нибудь простой последовательный протокол вроде UART. Одно из преимуществ в том, что он поддерживает по несколько устройств master и slave на одной шине. Это немного усложняет дело: как минимум, нужно сказать MCU, для какого slave подаются команды. Так что на высоком уровне кроме физических контактов есть ещё «логический» адрес OLED-дисплея.
К счастью, один из примеров в nRF5 SDK — это сканер I²C. Он опрашивает со все возможные логические адреса и сообщает, если там что-то установлено. Моя модифицированная версия здесь. Он выдаёт такой лог:
$ make
# ...
$ make flash
# ...
$ make log
# ...
TWI scanner.
TWI device detected at 0x3c.Отличная новость! У нас есть веские основания полагать, что дисплей правильно идентифицирован и это действительно вариант I²C. Поиск в гугле говорит, что
0x3c — типичный адрес для таких устройств.Теперь мы готовы отправить какие-то пиксели на дисплей. На этом уровне нет абстракции через библиотеку. В документации ssd1306 можно найти низкоуровневый способ передачи данных. Процесс состоит из последовательности команд конфигурации, которые устанавливают ориентацию дисплея, режим записи, размер и т.д. Затем в графическую память дисплея (GDDRAM) отправляется последовательность байт, которые отображаются на экране.
Для правильной конфигурации я изучил библиотеку ssd1306 от Adafruit и попытался эмулировать подобные команды. Именно на это ушла львиная часть времени в данном проекте. Узнать все детали оказалось весьма трудоёмким занятием, и всё равно некоторые вещи я не могу объяснить. Тем не менее, оно работает!
Отображение жёстко закодированного растрового рисунка
Код этого примера здесь.
С такими настройками дисплей делится на 4 строки (страницы) и 96 столбцов. Так что страницы по 8 пикселей в высоту. Первый отправленный байт расположится «вертикально» в первом столбце первой страницы. Второй байт займёт второй столбец, затем третий и так далее, вплоть до 96-го столбца, когда он возвращается и начинает с первого столбца на второй странице.
Таково ожидаемое поведение. Как показано на видео, наблюдаемое поведение отличается: сначала заполняются нечётные столбцы, затем чётные, и только потом он возвращается ко второй странице.
Я потратил немало времени, чтобы понять причину столь глупого поведения дисплея, а затем ещё некоторое время на настройку конфигурации, чтобы исправить это. В конце концов, я проглотил свою гордость и всё-таки реализовал в программе такую странную логику рендеринга, чтобы закончить на этом.
Путешествие в страну Arduino
Копаясь в библиотеке ssd1306 от Adafruit для Arduino, я всё время думал, что хорошо бы иметь способ «имитации» специфичных битов Arduino, чтобы протестировать их на nRF51822. Оказывается, гораздо более опытные люди тоже думали на эту тему — именно это делает удивительный проект sandeepmistry/arduino-nRF5. Он реализует основные библиотеки Arduino с помощью nRF5 SDK.
С помощью этого проекта мы можем открыть Arduino IDE, выбрать плату nRF5 — и использовать богатую экосистему Arduino. Я форкнул проект и добавил поддержку платы из нашего браслета. Его можно выбрать в раскрывающемся меню
Tools > Board > ID115 Fitness Bracelet (nRF51822).
Библиотека ssd1306 от Adafruit в оригинальном виде (вверху) и с патчем (внизу)
Это также означает, что теперь мы можем использовать библиотеку OLED от Adafruit. К моему удивлению и облегчению, произошло то же самое странное поведение с заполнением сначала нечётных, а потом чётных столбцов OLED! Я с удовольствием форкнул библиотеку и внедрил тот же хак. По сравнению с низкоуровневым подходом, теперь у нас есть доступ к разнообразным классным абстракциям, например, выводу текста:
Более привычный “Hello, world!”
Аналоговый ввод-вывод
Кроме цифровых сигналов «включить/выключить», у nRF51822 есть 10 контактов для аналогового ввода. Это полезно, например, для чтения текущего заряда аккумулятора. Судя по документации, чтение аналоговых контактов выдаёт 10-битное значение. Поэтому если на входе находится
0V, то мы прочитаем 0, а если там VCC, мы прочитаем 1023 с промежуточными значениями между ними.Я периодически считывал значения аналоговых входов и составил графики самых интересных сигналов:
Эффект встряхивания платы и зарядки аккумулятора по данным с аналоговых входов
Я убеждён, что контакт
P0.05 относится к заряду аккумулятора, потому что значение увеличивается и уменьшается по мере зарядки и разрядки. Подозреваю, что контакт P0.26 подключен к одному из выходов акселерометра, поскольку он сходит с ума при встряхивании платы. Контакты P0.03 и P0.04 тоже могут быть подключены к различным выходам акселерометра, но здесь на сигнал со входа скорее всего накладывается некий эффект второго порядка. Например, на первом графике обратите внимание, как уровень заряда батареи (вывод 5) изменяется, когда акселерометру требуется больше энергии. Это пример эффекта второго порядка.Код можно найти в этом наброске. Исходные данные и скрипт построения графика здесь. Теперь можно добавить несколько строк в нашу таблицу соответствия:
| Вывод nRF51822 | Площадка | Описание |
|---|---|---|
| P0.05 | - | Аналоговый вход — связан с зарядом батареи |
| P0.26 | - | Аналоговый вход — одна ось акселерометра |
| P0.03 | - | Аналоговый вход — одна ось акселерометра (вероятно) |
| P0.04 | - | Аналоговый вход — одна ось акселерометра (вероятно) |
Кнопка
В оригинальной прошивке прикосновение к браслету в определённой точке включает дисплей. При удержании этой точки запускается хронометр, если я правильно помню. Это не физическая кнопка, а какая-то ёмкостная сенсорная штука, которая работает на удивление хорошо. Используя тот же подход, что для поиска цифровых выходов, я нашёл место подключения к MCU (видео).
Код лежит здесь.
| Вывод nRF51822 | Площадка | Описание |
|---|---|---|
| P0.10 | - | Цифровой вход — встроенная кнопка |
Bluetooth low energy (BLE)
Функциональность BLE на чипах nRF5 реализована через нечто под названием SoftDevice. Это предварительно скомпилированный двоичный файл со стеком BLE. Он прошивается независимо от приложения. Есть много версий SoftDevice, в зависимости от версии SDK и версии чипа.
В документации приводится некая матрица зависимости (к сожалению, на неё нельзя поставить прямую ссылку). Она показывает, с какой SDK поставляются разные версии чипа — и какая там стоит версия SoftDevice. В нашем случае на чипе стоит отметка QFAAH0, у этой микросхемы 256 КБ флэш-памяти, 16 КБ оперативной памяти и заявлена совместимость с SoftDevice s130.
Мой SDK версии 12.3 уже содержит несколько примеров использования SoftDevice s130. По сравнению с предыдущими программами, которые прямо зашиваются в микросхемы с адреса
0x0, теперь нужно прошить SoftDevice с адреса 0x0, а саму программу — с адреса 0x1b000. После загрузки и инициализации двоичный файл SoftDevice перейдёт к этому адресу и передаст управление нашей программе. Чтобы проиллюстрировать, я взял тот же пример с морганием светодиодов, но изменил его для прошивки SoftDevice (код). Наблюдаемое поведение не изменилось, разве что следует заранее прошить SoftDevice:$ make
# ...
$ make flash-softdevice
# ...
$ make flash
# ...
$ make log
# ...
Hello, world!Пожалуй, самое простое приложение для Bluetooth — превращение устройства в маячок. Устройство только транслирует своё присутствие. Один из таких примеров есть в SDK под названием
ble_app_beacon. Он предполагает, что SoftDevice s130 уже прошит.Здесь тоже низкоуровневая коммуникация с чипом всё усложняет по сравнению с программированием через SDK. Кроме настройки размера оперативной памяти (это знание тяжко мне далось в примере со светодиодами), выявилась ещё одна трудно отслеживаемая проблема. Как оказалось, для выполнения чувствительных ко времени задач стек BLE использует генератор тактовой частоты. В примерах SDK предполагается наличие внешнего кварцевого генератора. Когда я это понял после тысяч попыток
printf, то изменил флаг конфигурации на использование синтетического генератора тактовых импульсов, и проблема решилась. Исходный код маячка здесь.BLE + Arduino
Когда пример BLE заработал с nRF5 SDK, зная о ловушках с оперативной памятью и генератором, я снова посмотрел на среду Arduino. И опять там оказался славный проект sandeepmistry/arduino-BLEPeripheral (от того же парня, что и arduino-nRF5!), который обеспечивает отличные абстракции поверх внутренней настройки BLE.
К моему удивлению, не пришлось даже форкать библиотеку. Автор проекта arduino-nrf5 потратил время и добавил конфигурацию всех плат и настроек, так что теперь выбор правильного генератора тактовых импульсов для SoftDevice сводится к простому выбору из выпадающего меню
Tools > Low Frequency Clock > Synthesized. Потрясающе. Я по-быстрому написал пример с включением зелёного светодиода по Bluetooth (с этим приложением). Его работа показана на видео.Дальнейшие планы
После возни с этой платой бесчисленные часы в течение нескольких недель у меня чешутся руки засунуть её подальше за стиральную машину и забыть на некоторое время.


{kind=link}