
В прошлой статье мы научились классифицировать данные без разметки с помощью понижения размерности и методов кластеризации. По итогам получили первичную разметку данных и узнали, что это картинки. С такими начальными условиями можно придумать что-то более серьёзное, например, дообучить существующую нейросеть на наши классы, даже если до этого она их никогда не видела. В iFunny на первом уровне модерации мы выделяем три основных класса:
approved — картинки идут в раздел collective (развлекательный контент и мемы);
not suitable — не попадают в общую ленту, но остаются в ленте пользователя (селфи, пейзажи и другие);
risked — получают бан и удаляются из приложения (расизм, порнография, расчленёнка и всё, что попадает под определение «противоправный контент»).
Сегодня на наглядных примерах расскажу, как мы перестраивали модель под наши классы, обучали её и выделяли паттерны распознавания картинок. Технические подробности — под катом.
Для начала возьмём небольшую сеть VGG-11, которая уже реализована во фреймворке pytorch. Сейчас есть много других сетей с результатами получше, но данная модель достаточно легкая, чтобы получить заметный результат за короткое время.
Зададим несколько преобразований, чтобы унифицировать данные и привести их к привычному для сети виду. Из документации следует, что модель была предобучена на изображениях размера 224×224 пикселя, приведённых к такому формату с помощью преобразований:
from torchvision import transforms
transform = transforms.Compose(
[
transforms.ToTensor(),
transforms.Resize(256),
transforms.CenterCrop(224),
transforms.Normalize(
mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225]
)
]
)Сначала уменьшаем изображение вдоль его наименьшей стороны до 256 пикселей, а затем вырезаем из центра квадрат со сторонами 224×224 пикселя. После этого независимо производится нормировка вдоль каждого канала в RGB-пространстве. Именно поэтому в преобразовании задано три значения среднего, и столько же дисперсий.
Зачем вообще нужно делать нормализацию? Представьте, что вы непутёвая Золушка и рассыпали на пол несколько видов круп, которые нужно собрать и разделить. Можно собирать по зёрнышку и сразу откладывать в нужную кучку, но удобнее собрать всё в одну кучку, а уже потом разделять по сортам. То же самое мы делаем для сети — собираем все значения в одну кучу, а потом заставляем сеть делить их на выделенные классы.
Теперь загрузим саму модель и её веса, полученные при обучении на датасете ImageNet:
From torchvision import models
model = models.vgg11(pretrained=True).eval()Метод eval класса VGG позволяет отключить обучение и расчёт градиента, что ускоряет предсказание модели там, где нужно узнать только ответ без дополнительного обучения, а также фиксирует все веса, что позволяет получать один и тот же ответ независимо от количества запусков. Картинки, которые находятся в наборе данных ImageNet, выглядят примерно так:

Посмотрим, на какие объекты изображений реагирует сеть при выборе того или иного класса — так лучше поймём, как она работает. Для этого воспользуемся вектором Шепли (Shapley Value), который отражает то, как меняется решение сети с параметром и без него (в нашем случае параметром будет значение пикселя).
Код для получения рисунка ниже можно взять из документации. Мы лишь добавили ещё одно изображение, заменили модель (в примере используется VGG-16), а также слой, с которого берётся градиент (с седьмого, как в примере, на десятый).
Результат следующий:
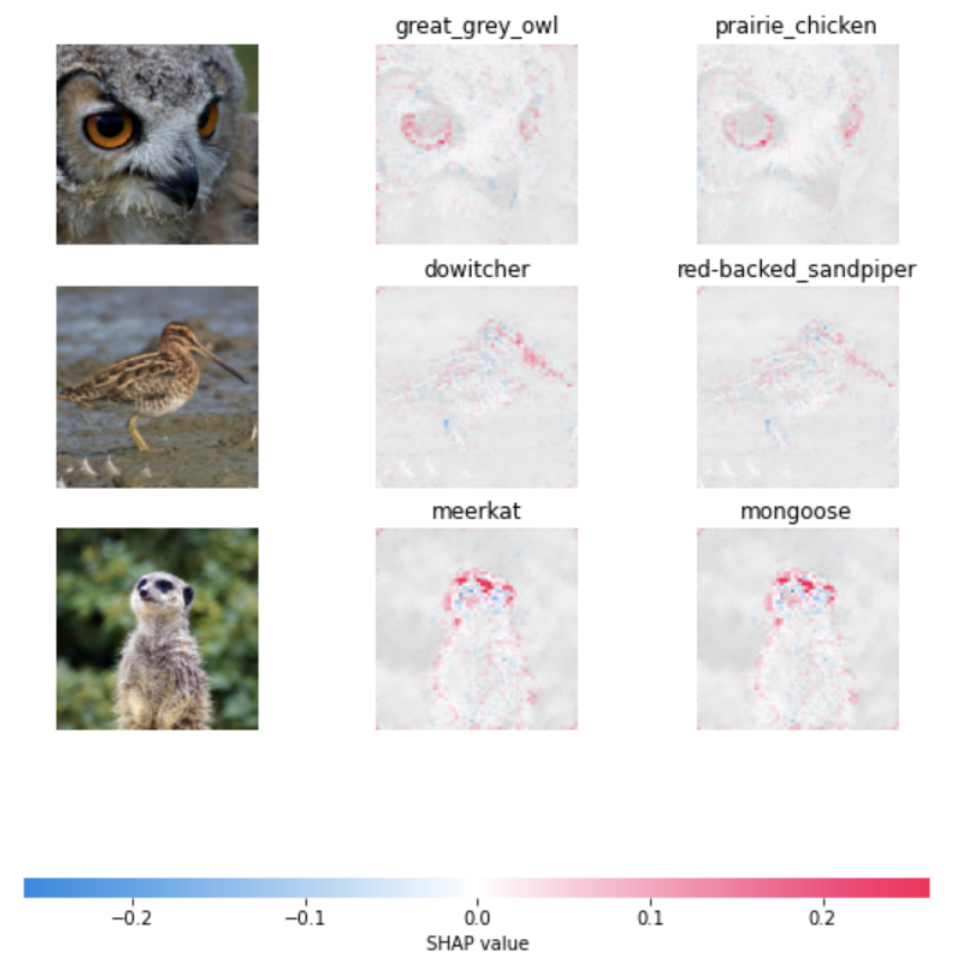
Первый столбец — исходная картинка, второй столбец — первый предсказанный класс с наибольшим значением вероятности, третий столбец — второй по важности класс. Красным выделено то, на что сеть реагировала больше всего, а синим — то, что её склоняло в сторону другого класса при выборе текущего.
Если погуглить названия классов, то будет видно, что даже если сеть ошиблась, как в случае совы (она не верно указала вид, однако это может быть связано с наличием только такого лейбла в датасете), то её ответ очень близок к истине.
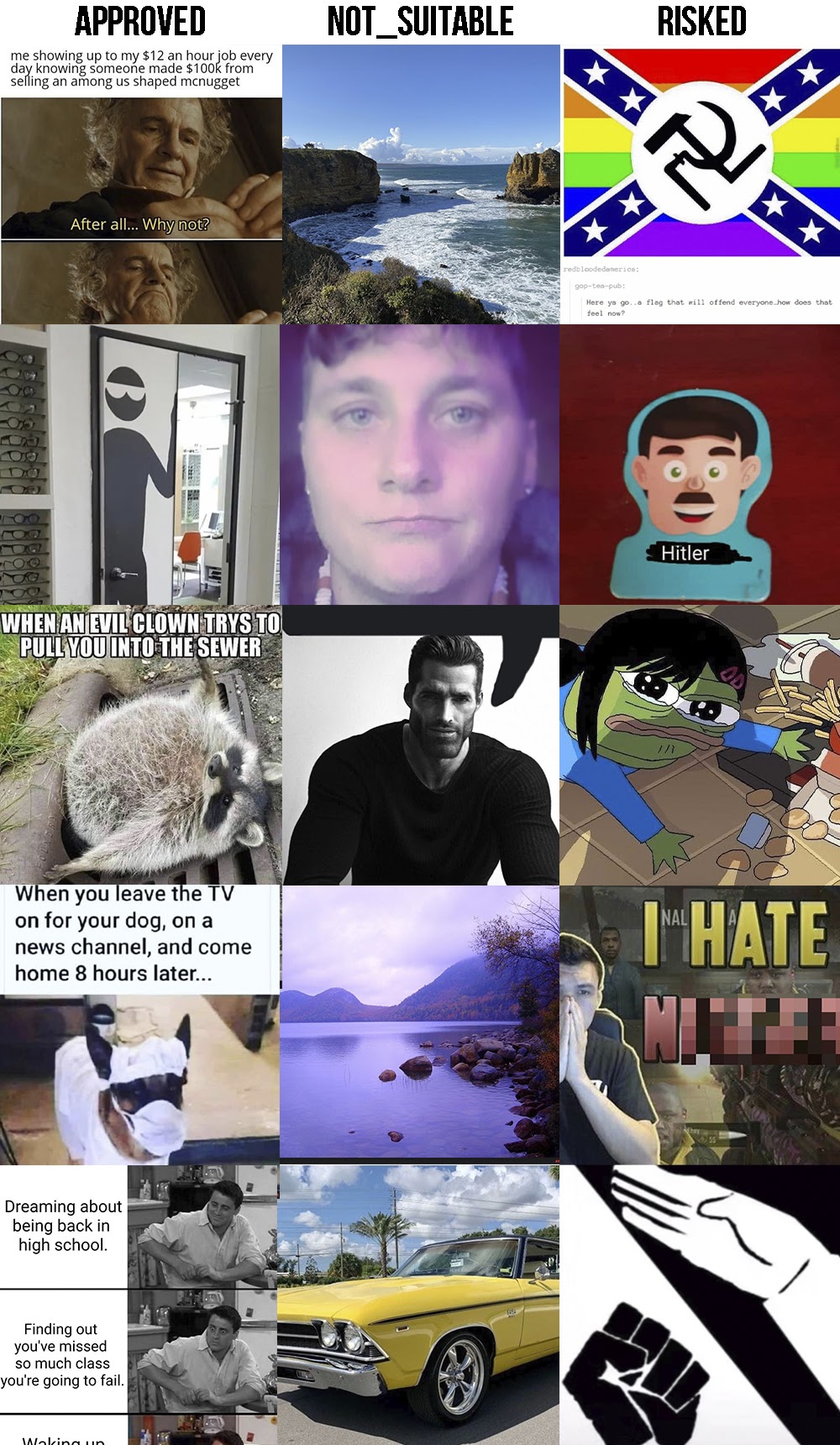
Теперь вспомним, что у нас есть свой датасет, который мы разметили. Для примера возьмём реальные картинки из трёх классов нашего приложения iFunny. Напомню их:
approved — картинки идут в раздел приложения collective;
not suitable — не попадают в общую ленту, но остаются в ленте пользователя. К этому относятся девушки в купальниках и мужчины в плавках, селфи и всё, что не является мемами и не несет в себе развлекательную функцию;
risked — сюда относится расизм, порно, расчленёнка и всё, что законадательно запрещено к размещению и может навредить имиджу компании. Такой контент получает бан и перестает быть доступным всем пользователям iFunny.
В процессе обучения придётся часто обращаться к данным и производить с ними математические операции на ЦПУ или ГПУ (в зависимости от железа). В фреймворке pytorch уже есть реализованный класс ImageFolder, открывающий изображение по заданному пути и присваивающий ему класс в соответствии с папкой, в которой находится. Чтобы им воспользоваться, необходимо сгруппировать изображения определённым образом. В нашем случае все тренировочные изображения лежат в train/interim и разбиты по папкам с названием класса, как это показано ниже. Название объекта должно быть уникальным (у нас это ID контента).
interim/
approved/
H6f8XI2i8.jpg
XFkQE1Zi8.jpg
...
not_suitable/
DCS2iR3i8.jpg
KmyGT7Yi8.jpg
...
risked/
KRXZUuci8.jpg
m6CH7yxh8.jpg
...Создадим словарь с датасетами тренировочной и валидационной выборок:
from torchvision import datasets
datasets = {
'train': ImageFolder(
root='train/interim/',
transform=transform
),
'valid': ImageFolder(
root='test/interim/',
transform=transform
),
}
datasets['train'].class_to_idxКак было сказано ранее, класс ImageFolder производит лейблирование — каждой названной папке сопоставляет определённую цифру. По факту выдает порядковый номер отсортированного по алфавиту списка классов:
{'approved': 0, 'not_suitable’: 1, 'risked’: 2}Это необходимо, поскольку производить математические операции с числами в процессе оптимизации сети проще, чем обращаться к строкам. Но загружать по одному изображению долго, поэтому используем DataLoader, который делает это сразу пачкой (в DS среде она называется батчом):
torchfrom torch.utils.data import DataLoader
batch_size = 100
num_workers = 20
dataloaders = {
'train': DataLoader(
datasets['train'],
batch_size=batch_size,
shuffle=True,
num_workers=num_workers
),
'valid': DataLoader(
datasets['valid'],
batch_size=batch_size,
shuffle=True,
num_workers=num_workers
)
}Передаём в DataLoader наш датасет и указываем размер батча, который говорит о том, сколько картинок загрузить в сеть одновременно. С точки зрения машины все изображения являются матрицами, а все операции внутри сети — матричными. Поэтому ничего не мешает производить их сразу с N изображениями, собрав их вместе.
Также DataLoader может загружать данные параллельно, за счёт чего процесс загрузки происходит в разы быстрее. Количество одновременных процессов на загрузку задаётся параметром num_workers.
Отобразим наш тренировочный датасет:
import numpy as np
real_batch = next(iter(dataloaders['train']))
plt.figure(figsize=(8,8))
plt.axis("off")
plt.title("Training Images")
plt.imshow(np.transpose(vutils.make_grid(real_batch[0][:64], padding=2, normalize=True),(1,2,0)));Примерно так выглядит контент, который загружают пользователи в iFunny, с единственным отличием, предполагающим сбалансированность классов в нашем датасете, в отличие от реальности, где risked контент составляет меньше 10%:
Перестройка модели под наши цели
Внутри сети происходит выделение разных паттернов (уши и хвосты на картинках с животными, как в примере выше), а самый последний слой на их основании делает предположение, чем является данный объект. Именно последний слой нам и нужно поменять, потому что на выходе он по умолчанию имеет тысячу классов, а нам нужно всего три, и совсем других, которых не было в этой тысяче.
В следующей строке повторим загрузку модели с заданной архитектурой VGG-11. Флаг pretrained в положении True позволяет загрузить предобученные на ImageNet веса, любезно предоставленные pytorch. Модель переводим в память ГПУ методом to, аргументом которого является название необходимого девайса, так как все дальнейшие вычисления будут производиться на ней.
device = 'cuda'
model = models.vgg11(pretrained=True, progress=False).to(device)Затем в цикле присваиваем атрибуту requires_grad всех слоев сети значение False, чтобы в процессе обучения они не изменялись:
for param in model.parameters():
param.requires_grad = FalseПосле чего меняем слой, отвечающий за классификацию:
model.classifier[6] = torch.nn.Linear(4096, 3).to(device)Важный момент: мы не переобучаем все предыдущие слои, так как считаем, что они уже научились выделять общие признаки, в отличие от последнего слоя, который только что поменяли и тем самым переключили его атрибут requires_grad в положение True. Этот слой необходимо обучить, так как теперь он имеет случайные веса, а значит не может корректно отличать что-либо. Также нужно задать оптимизатор, который будет подбирать наиболее подходящие веса и фактически обучать сеть.
Для этого возьмём один из методов градиентного спуска Adam. Ещё необходимо указать критерий, по которому будет идти оптимизация — для этого используем кросс-энтропию.
params_to_update = model.parameters()
print("Params to learn:")
params_to_update = []
for name,param in model.named_parameters():
if param.requires_grad == True:
params_to_update.append(param)
optimizer = torch.optim.Adam(params_to_update, lr=0.0001)
criterion = torch.nn.CrossEntropyLoss()В цикле выше собираем слои, у которых флаг requires_grad в положении True. До этого мы их переводили в положении False, поэтому в оптимизатор передаётся информация только о последнем слое.
Обучение модели
Для обучения воспользуемся функцией train_model из официального туториала pytorch:
import time
import copy
from tqdm import tqdm
def train_model(model, dataloaders, criterion, optimizer, num_epochs=10):
since = time.time()
val_acc_history = []
best_model_wts = copy.deepcopy(model.state_dict())
best_acc = 0.0
for epoch in range(num_epochs):
print('Epoch {}/{}'.format(epoch, num_epochs - 1))
print('-' * 10)
# Each epoch has a training and validation phase
for phase in ['train', 'valid']:
if phase == 'train':
model.train() # Set model to training mode
else:
model.eval() # Set model to evaluate mode
running_loss = 0.0
running_corrects = 0
# Iterate over data.
for inputs, labels in tqdm(dataloaders[phase]):
inputs = inputs.to(device)
labels = labels.to(device)
# zero the parameter gradients
optimizer.zero_grad()
# forward
# track history if only in train
with torch.set_grad_enabled(phase == 'train'):
outputs = model(inputs)
loss = criterion(outputs, labels)
_, preds = torch.max(outputs, 1)
# backward + optimize only if in training phase
if phase == 'train':
loss.backward()
optimizer.step()
# statistics
running_loss += loss.item() * inputs.size(0)
running_corrects += torch.sum(preds == labels.data)
epoch_loss = running_loss / len(dataloaders[phase].dataset)
epoch_acc = running_corrects.double() / len(dataloaders[phase].dataset)
print('{} Loss: {:.4f} Acc: {:.4f}'.format(phase, epoch_loss, epoch_acc))
# deep copy the model
if phase == 'valid' and epoch_acc > best_acc:
best_acc = epoch_acc
best_model_wts = copy.deepcopy(model.state_dict())
if phase == 'valid':
val_acc_history.append(epoch_acc)
print()
time_elapsed = time.time() - since
print('Training complete in {:.0f}m {:.0f}s'.format(time_elapsed // 60, time_elapsed % 60))
print('Best val Acc: {:4f}'.format(best_acc))
# load best model weights
model.load_state_dict(best_model_wts)
return model, val_acc_historyНа данный момент уже существует множество библиотек для автоматизации процесса обучения. Они отличаются между собой различными логгерами, возможностью подключения дополнительных модулей и другими удобствами. Но есть неизменная основа.
Нужно обязательно обнулять градиент командой optimizer.zero_grad() перед каждым запуском обратного распространения ошибки внутри сети:
loss.backward()
optimizer.step()Первая строка запускает операцию обратного распространения ошибки внутри сети из переменной потери (loss). Вторая — выполняет градиентный шаг на основе вычисленных градиентов.
Ответы нашей модели считаются в следующей строке:
outputs = model(inputs)А ошибку, которую используем в дальнейшем для расчёта градиента, получаем одной строчкой:
loss = criterion(outputs, labels)В процессе обучения происходит не только тренировка, но и проверка качества сети на объектах, не участвующих в обучении. Так можно выявить наличие переобучения, когда сеть начинает запоминать образцы из тренировочной выборки, и теряет обобщающую способность — то есть показывает результаты на новых данных заметно хуже, чем на тренировочных.
Чтобы этого избежать, нужно регулярно производить проверку на отложенной выборке. В данном процессе не стоит вычислять градиент, чтобы сеть не запомнила и эти примеры. Поэтому переключаем сеть в другой режим методом eval:
if phase == 'train':
model.train() # Set model to training mode
else:
model.eval() # Set model to evaluate modeДля иллюстрации процесса обучения и его результатов, мы провели обучение модели на 10 эпохах. Эпохой в DS среде называется полный проход по всем примерам выборки (обычно сеть не способна за один раз усвоить все правила, поэтому количество эпох почти всегда больше 1). Ниже приведены выводы функции обучения:
model, val_acc_history = train_model(model, dataloaders, criterion, optimizer, num_epochs=10)Логи обучения
0%| | 0/245 [00:00<?, ?it/s]
Epoch 0/9
----------
100%|██████████| 245/245 [00:51<00:00, 4.76it/s]
0%| | 0/30 [00:00<?, ?it/s]
train Loss: 0.8573 Acc: 0.6141
100%|██████████| 30/30 [00:08<00:00, 3.51it/s]
0%| | 0/245 [00:00<?, ?it/s]
valid Loss: 0.8701 Acc: 0.5867
Epoch 1/9
----------
100%|██████████| 245/245 [00:51<00:00, 4.73it/s]
0%| | 0/30 [00:00<?, ?it/s]
train Loss: 0.7892 Acc: 0.6526
100%|██████████| 30/30 [00:08<00:00, 3.57it/s]
0%| | 0/245 [00:00<?, ?it/s]
valid Loss: 0.8458 Acc: 0.6012
Epoch 2/9
----------
100%|██████████| 245/245 [00:51<00:00, 4.75it/s]
0%| | 0/30 [00:00<?, ?it/s]
train Loss: 0.7716 Acc: 0.6601
100%|██████████| 30/30 [00:08<00:00, 3.50it/s]
0%| | 0/245 [00:00<?, ?it/s]
valid Loss: 0.8380 Acc: 0.6049
Epoch 3/9
----------
100%|██████████| 245/245 [00:52<00:00, 4.70it/s]
0%| | 0/30 [00:00<?, ?it/s]
train Loss: 0.7551 Acc: 0.6658
100%|██████████| 30/30 [00:08<00:00, 3.59it/s]
0%| | 0/245 [00:00<?, ?it/s]
valid Loss: 0.8374 Acc: 0.6012
Epoch 4/9
----------
100%|██████████| 245/245 [00:52<00:00, 4.71it/s]
0%| | 0/30 [00:00<?, ?it/s]
train Loss: 0.7464 Acc: 0.6703
100%|██████████| 30/30 [00:08<00:00, 3.47it/s]
0%| | 0/245 [00:00<?, ?it/s]
valid Loss: 0.8166 Acc: 0.6157
Epoch 5/9
----------
100%|██████████| 245/245 [00:52<00:00, 4.71it/s]
0%| | 0/30 [00:00<?, ?it/s]
train Loss: 0.7423 Acc: 0.6731
100%|██████████| 30/30 [00:08<00:00, 3.57it/s]
0%| | 0/245 [00:00<?, ?it/s]
valid Loss: 0.8155 Acc: 0.6174
Epoch 6/9
----------
100%|██████████| 245/245 [00:52<00:00, 4.69it/s]
0%| | 0/30 [00:00<?, ?it/s]
train Loss: 0.7379 Acc: 0.6764
100%|██████████| 30/30 [00:08<00:00, 3.54it/s]
0%| | 0/245 [00:00<?, ?it/s]
valid Loss: 0.8117 Acc: 0.6221
Epoch 7/9
----------
100%|██████████| 245/245 [00:52<00:00, 4.69it/s]
0%| | 0/30 [00:00<?, ?it/s]
train Loss: 0.7329 Acc: 0.6780
100%|██████████| 30/30 [00:08<00:00, 3.55it/s]
0%| | 0/245 [00:00<?, ?it/s]
valid Loss: 0.8113 Acc: 0.6201
Epoch 8/9
----------
100%|██████████| 245/245 [00:51<00:00, 4.77it/s]
0%| | 0/30 [00:00<?, ?it/s]
train Loss: 0.7314 Acc: 0.6802
100%|██████████| 30/30 [00:08<00:00, 3.50it/s]
0%| | 0/245 [00:00<?, ?it/s]
valid Loss: 0.8106 Acc: 0.6221
Epoch 9/9
----------
100%|██████████| 245/245 [00:51<00:00, 4.73it/s]
0%| | 0/30 [00:00<?, ?it/s]
train Loss: 0.7243 Acc: 0.6787
100%|██████████| 30/30 [00:08<00:00, 3.65it/s]
valid Loss: 0.8184 Acc: 0.6123
Training complete in 10m 4s
Best val Acc: 0.622095По динамике видно, что метрики со временем улучшаются как на тренировочной, так и на валидационной выборках. При этом значения loss-функции падают. Это говорит о положительном течении процесса обучения, а также об отсутствии переобучения модели.
Результаты обучения
Также как и в случае с классификацией чисел, построим матрицу ошибок, чтобы увидеть, как наша модель справляется с поставленной задачей.
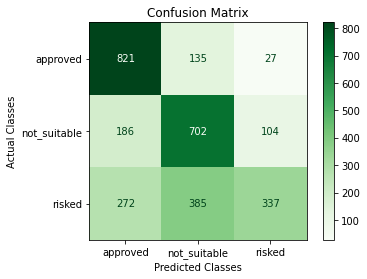
Сеть хорошо научилась разделять approved и not suitable контент, а вот с изображениями класса risked не всё так гладко. Но напомню, что использовалась очень простенькая сеть без каких-либо дополнительных методов улучшения, поэтому её ещё есть куда развивать.
Паттерны новой сети
Отразим основные паттерны нашей сети с помощью вектора Шепли.
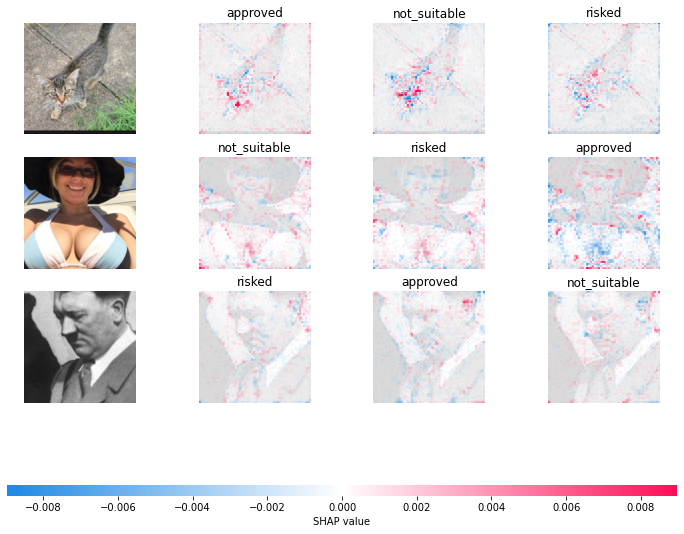
На первой картинке с котом видно, что сеть при выборе approved класса в основном смотрела на мордочку и уши. У Гитлера определённые паттерны при выборе класса risked выделить сложнее — сеть немного отреагировала на нос и усы, но скорее всего решение принималось по цветовой гамме, так как нацистские фото почти всегда чёрно-белые, и она цепляется за этот признак.
Самое интересное можно наблюдать на третьей картинке с девушкой. Грудь была важным параметром для выбора обоих классов (и risked, и not suitable), но оказала негативное влияние на класс approved, отклонив его. В пользу not suitable сеть склонил купальник, контур которого у этого класса выделен красным, а у risked — синим. В данном случае все логично, поскольку без купальника данный контент стал бы эротикой и считался недопустимым. Также наличие лица в кадре отрицательно сказалось при проверке сетью принадлежности объекта к risked классу — мы не запрещаем пользователям загружать селфи, но и не продвигаем его через общую ленту, так как такой контент больше подходит для Instagram.
Вместо заключения
Мы научились классифицировать данные с разметкой с помощью дообучения предобученной сети. А также разобрались, на что реагируют модели и как происходит обучение сети. Эти способы скорее базовые и не претендуют на совершенство, но являются отличной отправной точкой.
С помощью метода из первой статьи можно получить первичную разметку, которую придётся перепроверить вручную для лучшего качества, но это будет проще, чем размечать все объекты с нуля. На основе последовательности действий из статьи можно дообучить не только представленную сеть, но и что-то более сложное.
На данный момент в открытом доступе лежит большое количество готовых реализаций архитектур от Google, Facebook, а также других компаний и университетов с предобученными весами, показывающими отличные результаты, а порой даже относящихся к State of the Art (SOTA). Для поиска подходящей архитектуры есть удобный сайт Papers with Code, где в открытом доступе на GitHub есть готовые реализации.
Напоследок — мем, который был одобрен нашей обученной сетью с вероятностью 85%.

Вероятности классов:
approved — 0.8528
not suitable — 0.0996
risked — 0.0475
