Робот играет в бильярд
1 мин
Помните, был компьютер Deep Blue, который обыграл в шахматы Гарри Каспарова, после чего тот ушёл в политику? А вот теперь его силиконовый брат Deep Green обыграет любого мастера в бильярд. Он просто не умеет промахиваться.
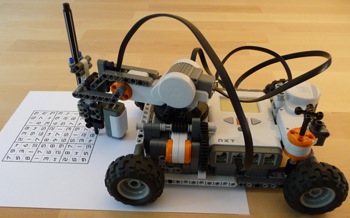
Выглядит махина действительно устрашающе: уж слишком грозен её лазерный прицел и слишком силён удар. Говорят, это просто вопрос времени, пока она кого-нибудь убьёт в пивном баре.
Монстра сконструировали в лаборатории роботехники Queens University.
via TechCrunch
Выглядит махина действительно устрашающе: уж слишком грозен её лазерный прицел и слишком силён удар. Говорят, это просто вопрос времени, пока она кого-нибудь убьёт в пивном баре.
Монстра сконструировали в лаборатории роботехники Queens University.
via TechCrunch



 Эволюция в
Эволюция в