
Привет, Хабр.
По мере написания библиотеки в этой статье я хочу продолжить объяснять математику, лежащей в основе работы дополненной реальности. Результатом будет пример на игровом движке Unity, распознающий маркер и накладывающий на него трехмерную модельку. Библиотека пишется на C++ под Android, но фокус статьи будет направлен на математику. Эта статья, в отличии от предыдущей, будет ближе к практике, но если необходимо разобраться с основами векторной математики, то можно начать с нее.
Однородные координаты
В предыдущей статье мы рассматривали преобразования в евклидовом пространстве —  , а сейчас ведем понятие проективного пространства —
, а сейчас ведем понятие проективного пространства —  (projective space).
(projective space).
Чтобы перевести координаты точки из двумерного евклидова пространства в проективное, нужно умножить вектор координат на любой ненулевой скаляр  , а затем добавить в качестве последней компоненты:
, а затем добавить в качестве последней компоненты:  . Получаем однородные координаты точки (homogeneous coordinates). Так как — свободная переменная, то одной точке евклидова пространства принадлежит бесконечное множество точек проективного пространства. Перевод обратно выполняется делением на последнюю компоненту:
. Получаем однородные координаты точки (homogeneous coordinates). Так как — свободная переменная, то одной точке евклидова пространства принадлежит бесконечное множество точек проективного пространства. Перевод обратно выполняется делением на последнюю компоненту:  . Удобно в качестве значения брать 1:
. Удобно в качестве значения брать 1:  . Перевод обратно в таком случае также упрощается:
. Перевод обратно в таком случае также упрощается:  .
.
Можно заметить, что умножение однородных координат на скаляр не меняет координат соответствующей точки в евклидовом пространстве:  .
.
Также, если последняя компонента равна 0, то такую точку мы не сможем перевести в евклидово пространство:  – такая точка называется точкой на бесконечности (point at infinity или ideal point).
– такая точка называется точкой на бесконечности (point at infinity или ideal point).
Трансформации в однородных координатах
Трансформации, которые мы делали в евклидовом пространстве, можно применять и для однородных координат.
Для примера возьмем поворот точек матрицей поворота:  .
.
В однородных координатах это принимает такую форму: 
А смещение выполнялось следующим образом:  . Мы не могли преобразовать смещение объекта в матричную операцию, так как она нелинейна в евклидовом пространстве. Но уже в проективном пространстве она становится линейной
. Мы не могли преобразовать смещение объекта в матричную операцию, так как она нелинейна в евклидовом пространстве. Но уже в проективном пространстве она становится линейной  :
:  .
.
Из предыдущей статьи мы помним, что матричные операции, можно объединять. Объединим поворот и смещение:


Метод наименьших квадратов
Прежде чем двигаться дальше, вооружимся новым инструментом — методом наименьших квадратов (МНК).
Возьмем для примера такую систему линейных уравнений:

Эту систему можно представить в матричном виде:
 .
.
Неизвестных у нас два, количество уравнений — три, значит это переопределенная система уравнений. А значит решения одних уравнений может противоречить другим, и система может не иметь точного решения. Ошибка получаемых решений — это обычное дело для вычислительной математики, нужно только ее минимизировать. В качестве ошибки возьмем сумму квадратов разницы: пусть  ,
,  — вектор остатков,
— вектор остатков,  — функция ошибки.
— функция ошибки.  .
.
В матричном виде задачу минимизации можно записать так:  .
.
Решение нашей системы:


Метод можно применять и для системы нелинейных уравнений. Мы определили функцию ошибки как сумму квадратов остатков. Дальше нам нужно найти минимум этой функции. Минимум функции нужно искать в ее экстремумах. Экстремумы находятся там, где производные функции равны нулю:

Получим систему уравнений, которая в отличии от предыдущей, будет точно не переопределена. Если система уравнений — линейная, то решение будет только одно и получить его не составляет труда. Если решений несколько, то перебираем их и выбираем минимальное.
Немного практики
Перейдем наконец к практическим экспериментам. Для того, чтобы упростить себе работу, возьмем пока библиотеку OpenCV и используем ее для поиска маркеров. Найдем маркер и наложим на него изображение.
Пусть и  — ширина и высота накладываемого изображения. Тогда четыре угла будут иметь следующие локальные координаты:
— ширина и высота накладываемого изображения. Тогда четыре угла будут иметь следующие локальные координаты:
![$[\vec{v_1}, \vec{v_2}, \vec{v_3}, \vec{v_4}] = [\begin{pmatrix} 0 & 0 \end{pmatrix}^T, \begin{pmatrix} w & 0 \end{pmatrix}^T, \begin{pmatrix} w & h \end{pmatrix}^T, \begin{pmatrix} 0 & h \end{pmatrix}^T]$](https://habrastorage.org/getpro/habr/formulas/bef/0ad/7ab/bef0ad7abc59f066228f9676bfdb10dd.svg)
От OpenCV мы получаем координаты 4х углов маркера в кадре: ![$[\vec{m_1}, \vec{m_2}, \vec{m_3}, \vec{m_4}]$](https://habrastorage.org/getpro/habr/formulas/b1c/b76/744/b1cb76744a2954d540ba273df9b9a73e.svg)
Для наложении изображения на маркер нам необходимо описать преобразование из локальных координат накладываемого изображения в координаты кадра с камеры. Для этого возьмем два вектора  и
и  , описывающих базовые оси
, описывающих базовые оси  ,
,  и вектор смещения от начала координат —
и вектор смещения от начала координат —  :
:

Можем упростить формулу, вычеркнув последнюю строку:


Одна пара точек задает два линейных уравнений, при этом имеем 6 неизвестных. Значит нужно 3 пары точек, чтобы система была определена. Мы имеем 4, а значит она переопределена. Воспользуемся МНК для нахождения нашего преобразования:
Пусть искомый вектор  будет собран из наших неизвестных следующим образом
будет собран из наших неизвестных следующим образом  .
.
Исходя из такого вектора , матрица  , задающая нашу линейную систему уравнений будет иметь следующий вид:
, задающая нашу линейную систему уравнений будет иметь следующий вид:

А вектор  будет равен:
будет равен:

Тогда, используя МНК, можем получить решение нашей системы: . Отсюда получаем , и .
Пробуем!

Красным рисуются координаты маркера, полученного от OpenCV. В целом работает, но если взять низкий угол по отношению к маркеру, то видно, что искажения работают неправильно. А так получилось, потому что для моделирования пространственных искажений маркера мы использовали аффинную матрицу. Важное свойство аффинной матрицы — линии, полученные после преобразования, остаются параллельными. Однако обычно, смотря на параллельные линии на плоскости, мы видим такую картину:
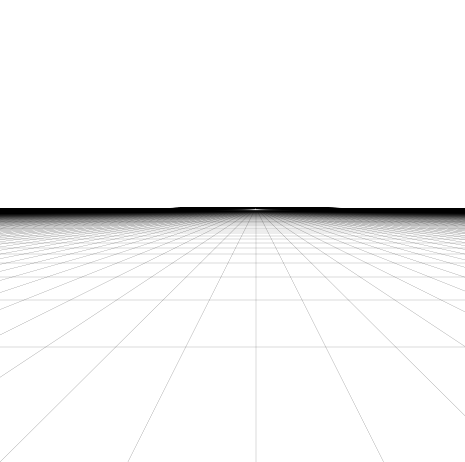
Параллельные линии при проецировании сходятся в одной точке, т.е. становятся не параллельными. Значит аффинной матрицы нам недостаточно.
Direct linear transformation
Получить лучший результат нам поможет алгоритм, который называется Direct linear transformation.
А описать перспективные искажения поможет перспективная матрица размером 3x3:  .
.
Перевод из евклидовых координат в однородные обозначим как  и распишем полученное преобразование для наших
и распишем полученное преобразование для наших  точек (
точек ( , а
, а  в нашем случае):
в нашем случае):

Представим наши уравнения в виде системы уравнений:



Представим матрицу  как вектор
как вектор  .
.
Теперь систему уравнений можно перевести в матричный вид: 

Получили однородную систему уравнений в которой нам неизвестен вектор  (т.е. матрица ). Однородную систему уравнений мы не сможем решить при помощи метода наименьших квадратов. Однако одно решение найти несложно — это нулевой вектор —
(т.е. матрица ). Однородную систему уравнений мы не сможем решить при помощи метода наименьших квадратов. Однако одно решение найти несложно — это нулевой вектор —  . Но такое решение нас не интересует. Если же система имеет какое-то ненулевое решение, то мы получаем сразу бесконечное множество решений. Для примера пусть мы уже имеем ненулевое решение — вектор : . Теперь умножим вектор на любой ненулевой скаляр
. Но такое решение нас не интересует. Если же система имеет какое-то ненулевое решение, то мы получаем сразу бесконечное множество решений. Для примера пусть мы уже имеем ненулевое решение — вектор : . Теперь умножим вектор на любой ненулевой скаляр  , система уравнений все равно останется справедливой, а
, система уравнений все равно останется справедливой, а  — также будет еще одним решением системы:
— также будет еще одним решением системы:  . Так как мы работаем с однородными координатами, то умножение на скаляр ничего не меняет. Тем не менее, чтобы не работать сразу со множеством решений, будем искать только одно — пусть длина вектора будет равна единицы
. Так как мы работаем с однородными координатами, то умножение на скаляр ничего не меняет. Тем не менее, чтобы не работать сразу со множеством решений, будем искать только одно — пусть длина вектора будет равна единицы  .
.
Сингулярное разложение и решение однородных систем уравнений
Решить однородную систему уравнений можно при помощи сингулярного разложения матрицы (singular value decomposition). Сингулярное разложение — это разложение вида:  , где
, где  и
и  — ортонормальные матрицы, а
— ортонормальные матрицы, а  — диагональная, при этом диагональные элементы больше либо равны нулю и располагаются в порядке убывания (сверху вниз). Если воспринимать матрицу как операцию трансформации векторов, то это разложение будет декомпозицией этой трансформации на три последовательных: поворот, масштабирование по осям, второй поворот. Матрицы и — это ортонормальные матрицы, а значит можно назвать их матрицами поворота. Только следует учитывать, что
— диагональная, при этом диагональные элементы больше либо равны нулю и располагаются в порядке убывания (сверху вниз). Если воспринимать матрицу как операцию трансформации векторов, то это разложение будет декомпозицией этой трансформации на три последовательных: поворот, масштабирование по осям, второй поворот. Матрицы и — это ортонормальные матрицы, а значит можно назвать их матрицами поворота. Только следует учитывать, что  и
и  , а значит, например, если
, а значит, например, если  — имеет размер 3x3, то тройка базисных векторов и этих матриц поворота могут быть левосторонними, а не правосторонними как обычно.
— имеет размер 3x3, то тройка базисных векторов и этих матриц поворота могут быть левосторонними, а не правосторонними как обычно.
Не будем останавливаться на том, как вычислять это разложение. В более-менее полноценных математических фреймворках оно будет реализовано. Например — Eigen.
Воспользуемся этим разложением для полученной выше матрицы :  . Лучшее решение для нашей системы уравнений — это последняя строка матрицы :
. Лучшее решение для нашей системы уравнений — это последняя строка матрицы :  . А так как матрица — ортонормальная, то длина вектора, составленного из любого его столбца, будет равна как раз единице.
. А так как матрица — ортонормальная, то длина вектора, составленного из любого его столбца, будет равна как раз единице.
В процессе вычислений у нас всегда есть погрешность, а это значит после  мы можем получить не нулевой вектор, хотя его компоненты должны быть близки к нулю. Нужно минимизировать получаемую погрешность, а для ее оценки воспользуемся обычной для таких вещей суммой квадратов:
мы можем получить не нулевой вектор, хотя его компоненты должны быть близки к нулю. Нужно минимизировать получаемую погрешность, а для ее оценки воспользуемся обычной для таких вещей суммой квадратов:  .
.

 , так как — ортонормальная матрица, то
, так как — ортонормальная матрица, то  . Так как — диагональная матрица с ненулевыми элементами, расположенными по убыванию, то и
. Так как — диагональная матрица с ненулевыми элементами, расположенными по убыванию, то и  — также будет диагональной матрицей с ненулевыми элементами, расположенными по убыванию — это будет эквивалентно возведению в квадрат диагональных элементов матрицы. Обозначим
— также будет диагональной матрицей с ненулевыми элементами, расположенными по убыванию — это будет эквивалентно возведению в квадрат диагональных элементов матрицы. Обозначим  .
.

Обозначим  , заметим, что — не сохраняет длину вектора , значит
, заметим, что — не сохраняет длину вектора , значит  :
:
 .
.
Представим диагональ матрицы как вектор  . Тогда
. Тогда 
Теперь подумаем чему должен быть равен  , чтобы
, чтобы  стало минимальным. Так как значения в . Судя по
стало минимальным. Так как значения в . Судя по  , наибольший вклад должен вносить последняя компонента вектора . Так как , то выходит
, наибольший вклад должен вносить последняя компонента вектора . Так как , то выходит  .
.
 .
.
Из описанного выше делаем вывод, что — это последний столбец матрицы .
Возвращаемся к нашей системе уравнений . Решаем ее описанным выше способом, получаем вектор . Затем из этого уже получаем искомую матрицу . Пробуем:

Как мы видим стало заметно лучше и искажения уже похожи на правду.
Соответствующий код для аффинных и перспективных искажений можно найти в тестах проекта — sonar/tests/test_marker_transform
Pinhole camera model
Хорошо, мы получили какую-то матрицу для преобразования изображений, но в идеале хотелось бы получить координаты камеры в пространстве. Чтобы их найти, построим математическую модель, которая будет описывать как точки мирового пространства проецируются на изображение камеры.
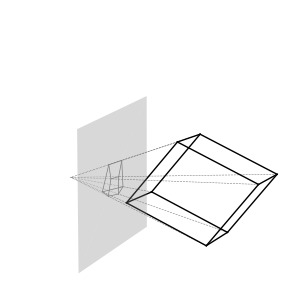
В качестве модели формирования изображения возьмем центральную проекцию. Суть центральной проекции состоит в том, что все точки, которые формируют выходное изображение, формируют лучи, сходящиеся в одной точке — центре проекции. Примерно так лучи себя и ведут в модели глаза или в цифровой камере.
Проецировать точки будем на плоскость, которая и будет формировать наше изображение. В качестве такой плоскости возьмем плоскость, заданную таким условием  . В таком случае наша камера будет сонаправлена с осью
. В таком случае наша камера будет сонаправлена с осью  :
:
Зададим параметрически формулу луча, формирующего точку на проекции:  , где
, где  — координаты точки луча,
— координаты точки луча,  — координаты проецируемой точки, а
— координаты проецируемой точки, а  — является свободным параметром. Если луч не лежит на нашей плоскости и не параллелен ей, то он будет пересекать ее только в одной точке. При этом мы знаем, что
— является свободным параметром. Если луч не лежит на нашей плоскости и не параллелен ей, то он будет пересекать ее только в одной точке. При этом мы знаем, что  .
.


Получаем координаты спроецированной на плоскость точки:  . Ничего не напоминает? Это формула перевода из однородных координат в двумерные евклидовы. Получается, что трехмерные координаты можно воспринимать как однородные координаты, соответствующие двумерным евклидовым координатам на плоскости. А перевод из однородных координат в двумерные евклидовы координаты выполняет центральную проекцию. Можно сказать, что трехмерные евклидово пространство эквивалентно двумерному проекционному.
. Ничего не напоминает? Это формула перевода из однородных координат в двумерные евклидовы. Получается, что трехмерные координаты можно воспринимать как однородные координаты, соответствующие двумерным евклидовым координатам на плоскости. А перевод из однородных координат в двумерные евклидовы координаты выполняет центральную проекцию. Можно сказать, что трехмерные евклидово пространство эквивалентно двумерному проекционному.
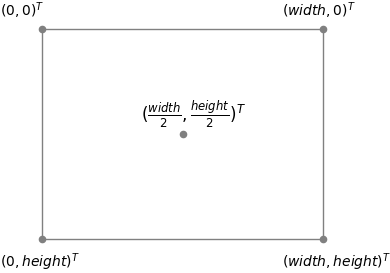
После проецирования точки на плоскость можно переводить ее в координаты изображения. Обычно координаты изображения определены следующим образом, где  и
и  — высота и ширина изображения:
— высота и ширина изображения:
Пусть у нас для камеры задан угол обзора по горизонтали —  .
.
Масштабируем координату  точки
точки  так, чтобы расстояние от крайней левой видимой точки камеры до крайней правой было равно ширине изображения. При проецировании имеем такую картину:
так, чтобы расстояние от крайней левой видимой точки камеры до крайней правой было равно ширине изображения. При проецировании имеем такую картину:
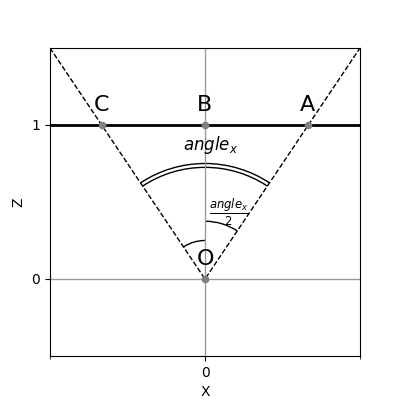
Здесь  — левая и правые крайние точки,
— левая и правые крайние точки,  — точка между ними, у которой координата
— точка между ними, у которой координата  , а . Угол
, а . Угол  . При этом имеем треугольник
. При этом имеем треугольник  , у которого угол
, у которого угол  , а угол
, а угол  , так как
, так как  делит угол
делит угол  пополам. Длина равна 1. Отсюда через тангенс угла
пополам. Длина равна 1. Отсюда через тангенс угла  найдем длину
найдем длину  —
—  . А уже отсюда
. А уже отсюда  .
.
После проецирования сводим диапазон координаты — ![$[- \tan{\frac{angle_x}{2}}, \tan{\frac{angle_x}{2}}]$](https://habrastorage.org/getpro/habr/formulas/247/24b/666/24724b666ca4dd04fbc732dc73f5c48a.svg) к диапазону
к диапазону ![$[- \frac{width}{2}, \frac{width}{2}]$](https://habrastorage.org/getpro/habr/formulas/9d1/a96/db7/9d1a96db7da4db0469eeb185bbd2f48b.svg) умножением на коэффициент:
умножением на коэффициент:

Чтобы сохранить пропорции изображения, то координату  мы должны масштабировать на ту же величину. Но на выходном изображении ось направлена в обратную сторону (вниз). Чтобы отразить ось, умножим коэффициент масштаба по оси на
мы должны масштабировать на ту же величину. Но на выходном изображении ось направлена в обратную сторону (вниз). Чтобы отразить ось, умножим коэффициент масштаба по оси на  . Получаем такое преобразование:
. Получаем такое преобразование:


А координаты видимого изображения получили такой диапазон:

Получилось так, что центр изображения — нулевая точка. Чтобы получить нужные на координаты на изображении, сместим крайнюю левую точку в центр:

Теперь центральная точка изображения будет иметь координаты  , как ей и положено. Эта центральная называется оптическим центром, обозначим ее как
, как ей и положено. Эта центральная называется оптическим центром, обозначим ее как  . И финальная формула преобразования в координаты изображения:
. И финальная формула преобразования в координаты изображения:
 , где
, где  , а .
, а .
Также, как мы делали до этого, можно упростить преобразование, работая сразу с однородными координатами точки и трансформируя все выражения в матричную форму:
Пусть  , тогда
, тогда  .
.
Возвращаемся немного назад. Вспоминаем, что трехмерном пространстве — это проективное пространство для плоскости, на которую мы проецируем. Т.е. трехмерные координаты — это однородные координаты. Тогда формула перевода из трехмерного пространства в координаты изображения при центральной проекции принимает вид:

Матрицу  — называют внутренними параметрами камеры (intrinsic camera parameters).
— называют внутренними параметрами камеры (intrinsic camera parameters).
Эта матрица может в себе иметь еще параметр  :
:
 .
.
Эффект от его применения чем схож эффектом от rolling shutter. На практике обычно этот параметр не учитывается и остается равно нулю.
Следует учитывать, что формулы вычисления параметров  справедливы, если мы хотим перевести именно в пиксельные координаты изображения. Но других случаях нам может быть нужно перевести в другую координатную систему, например, в текстурные координаты, где значения координат и меняются в диапазоне
справедливы, если мы хотим перевести именно в пиксельные координаты изображения. Но других случаях нам может быть нужно перевести в другую координатную систему, например, в текстурные координаты, где значения координат и меняются в диапазоне ![$[0, 1]$](https://habrastorage.org/getpro/habr/formulas/6e2/075/7f0/6e20757f072cd273db5f1ea44424f67d.svg) . Тогда эти параметрами будут уже другими.
. Тогда эти параметрами будут уже другими.
Погрешности на производстве при сборки камер немного сказываются и на получаемых с них изображениях, оптический центр смещается немного от центра изображения, а каждая камера имеет слегка отличающиеся внутренние параметры. Поэтому каждая камера калибруется индивидуально. Реализацию калибровки можно найти в OpenCV.
В API Android OS и iOS можно найти методы получения внутренних параметров камеры, заданные производителем.
Сейчас же предлагаю просто считать оптическим центром — центр изображения, а параметры  подбирать "на глаз". Для начала хватит и такого варианта.
подбирать "на глаз". Для начала хватит и такого варианта.
Перемещение камеры в пространстве
Все относительно — и хотя наблюдатель перемещается в пространстве, а мир стоит на месте, мы также можем сказать, что движется мир, а наблюдатель остается на месте. Меняется только система координат, в которой происходит движение. Значит выберем ту, которая для нас удобнее. А удобнее нам оставить локальную систему координат на месте, и все остальное пусть движется вокруг нее. Движение у нас определяется поворотом и смещением — матрицей поворота  и вектором смещения . Также считаем, что у нас есть внутренние параметры камеры, заданные матрицей . Таким образом мы можем разбить процесс вычисления координат на изображении из мировых координат на два этапа:
и вектором смещения . Также считаем, что у нас есть внутренние параметры камеры, заданные матрицей . Таким образом мы можем разбить процесс вычисления координат на изображении из мировых координат на два этапа:
- Перевод мировых координат в локальные координаты камеры
 при помощи и :
при помощи и : 
- Перевод из локальных координат камеры в пиксельные координаты изображения при помощи матрицы :

Как мы уже знаем, матрицу и вектор можно объединить в одну матрицу, только для того, чтобы ее применить придется перевести в однородные координаты:

Мы знаем, что  и нам необязательно ее вычислять, поэтому можем чуть сократить формулу:
и нам необязательно ее вычислять, поэтому можем чуть сократить формулу:

Более короткая версия этой же формулы:
![$\vec{v'} = [R | \vec{t}] \begin{pmatrix} \vec{v} \\ 1 \end{pmatrix}$](https://habrastorage.org/getpro/habr/formulas/453/13a/0c8/45313a0c86ee2e5fb8b45dfac7fce7ca.svg)
Теперь мы можем объединить два этапа в одну формулу:
![$\vec{p} = project(K \cdot [R | \vec{t}] \begin{pmatrix} \vec{v} \\ 1 \end{pmatrix})$](https://habrastorage.org/getpro/habr/formulas/de6/34e/c45/de634ec45e2fa0e411c7aa5df3e3bc5d.svg)
К этому моменту можно нас поздравить — мы построили математическую модель проецирования изображения камеры. Опираясь на нее далее мы сможем понять, что происходит в видеопотоке. А точнее нашей основной задачей станет поиск параметров и . Эти параметры называют внешними параметрами камеры (extrinsic camera parameters). Так как мы предположили, что камера остается на месте, а двигается окружающий мир, то — это не матрица поворота самой камеры, а вектор — не координаты позиции камеры. Матрица — это поворот из мировых координат в локальные координаты камеры, а когда говорят о повороте объекта, то имеют ввиду поворот из локальных координат в мировые. Поэтому поворот камеры — это  . Вектор — вектор смещения камеры. Позицию камеры в мировых координатах можем найти следуя такой логике: при переводе в локальные координаты позиция камеры должна стать нулевым вектором —
. Вектор — вектор смещения камеры. Позицию камеры в мировых координатах можем найти следуя такой логике: при переводе в локальные координаты позиция камеры должна стать нулевым вектором —  .
.
Получаем координаты камеры от маркера
Возвращаемся к предыдущему примеру. В нем мы нашли перспективную матрицу , описывающую преобразования наших точек:

Попробуем разобраться как эта формула соотноситься с нашей моделью:
![$\vec{p} = project(K \cdot [R | \vec{t}] \begin{pmatrix} \vec{v} \\ 1 \end{pmatrix}) = project(K \cdot \begin{pmatrix} R_{11} & R_{12} & R_{13} & t_x \\ R_{21} & R_{22} & R_{23} & t_y \\ R_{31} & R_{32} & R_{33} & t_z \end{pmatrix} \begin{pmatrix} v_x \\ v_y \\ v_z \\ 1 \end{pmatrix})$](https://habrastorage.org/getpro/habr/formulas/f1f/6af/e09/f1f6afe093bd8ee16072a490e5661ff2.svg)
Точки маркера в нашем случае задаются двумерными координатами, так как они все лежат на плоскости, т.е.  . А так как , то столбец
. А так как , то столбец  не вносит вклада в результат, а значит его можно вычеркнуть, сократив формулу:
не вносит вклада в результат, а значит его можно вычеркнуть, сократив формулу:

Пусть  , тогда получаем:
, тогда получаем:

Получили идентичную формулу. Но сделать вывод, что  — нельзя. При вычислении матрицы мы получили целое множество решений и выбрали из этого множества удобное для нас. При работе с однородными координатами умножение на скаляр не играет роли, но в нашей модели мы уже оперируем трехмерными евклидовыми координатами. Поэтому
— нельзя. При вычислении матрицы мы получили целое множество решений и выбрали из этого множества удобное для нас. При работе с однородными координатами умножение на скаляр не играет роли, но в нашей модели мы уже оперируем трехмерными евклидовыми координатами. Поэтому  . Отсюда:
. Отсюда:
![$H = s \cdot K [R | \vec{t}] = K \cdot \begin{pmatrix} s \cdot R_{11} & s \cdot R_{12} & s \cdot t_x \\ s \cdot R_{21} & s \cdot R_{22} & s \cdot t_y \\ s \cdot R_{31} & s \cdot R_{32} & s \cdot t_z \end{pmatrix}$](https://habrastorage.org/getpro/habr/formulas/18f/2dc/952/18f2dc95274d0a23199d7591f7046f46.svg) .
.
Пусть 
Первые два столбца полученной матрицы составляют два базисных вектора матрицы поворота. Длины этих векторов должны быть равны единице. Отсюда мы можем найти параметр  . Из-за погрешностей вычислений первый и второй вариант вычислений будут давать немного разные варианты, поэтому возьмем среднее между ними:
. Из-за погрешностей вычислений первый и второй вариант вычислений будут давать немного разные варианты, поэтому возьмем среднее между ними:  .
.
Теперь вычислим два базисных вектора матрицы поворота:





Итак, мы получили координаты камеры в пространстве. Теперь можем передать эти координаты трехмерному движку, чтобы он вывел трехмерные модели поверх реального изображения. Что и было реализовано в плагине для Unity. Видео, записанное с android-сматфона:
Точки маркера, на которых мы основываем нашу мировую систему координат в наших вычислениях и которая одновременно с этим является нашим полом, находятся в плоскости  . У Unity же пол является плоскостью
. У Unity же пол является плоскостью  . Чтобы повернуть пол в нужные нам координаты, я воспользовался встроенными в Unity средствами — создал пустой объект, назначил его "родителем" камеры, и повернул так, как мне нужно. Таким образом, мне самому не пришлось делать дополнительных вычислений. Также важно сопоставить характеристики виртуальной камеры и реальной. Пример этого можно увидеть в коде плагина.
. Чтобы повернуть пол в нужные нам координаты, я воспользовался встроенными в Unity средствами — создал пустой объект, назначил его "родителем" камеры, и повернул так, как мне нужно. Таким образом, мне самому не пришлось делать дополнительных вычислений. Также важно сопоставить характеристики виртуальной камеры и реальной. Пример этого можно увидеть в коде плагина.
Нужно еще отметить, что описать преобразование точек при помощи перспективной матрицы размером 3x3 можно только в случае, когда идет отображение точек с одной плоскости на другую. Такая матрица называется матрицей гомографии (homography matrix). В нашем случае шло отображение с плоскости маркера на плоскость проекции. Но при работе трехмерными координатами алгоритм direct linear transformation задействовать уже не получится и нужно будет искать другие способы.
Заключение
Код, реализующий все примеры выше можно найти в проекте на гитхаб в ветке article2.
Точность пока оставляет желать лучшего. Более того, маркеры являются не самом удобным способ взаимодействия с дополненной реальностью, поэтому далее будем пытаться отойти от их использования и улучшать точность работы.

