Доброго времени суток, дорогой читатель!
В данной статье мы разработаем нейронную сеть, которая сможет на неплохом уровне проходить созданную специально для неё игру.
Примечание: данная статья не объясняет термин "нейронная сеть" и всё, что с ним связано, а также не предоставляет базовую информацию об обучении сети методом трассировки. Рекомендуем кратко ознакомиться с этими понятиями до прочтения статьи
Цель — словить как можно больше кругов с зелёным ободком, избегая кругов с красным.
Условия:
После соприкосновения шар пропадает, а игроку начисляются соответствующие очки.
Для того, чтобы ИИ смог принять решение, куда двигаться игроку, нужно для начала получить данные об окружающей среде. Для этого создадим специальные сканеры, представляющие из себя прямые линии. Первый сканер расположен под углом 180 градусов по отношению к нижней границе поля.
Их будет 68: первые 32 — реагируют на бомбы (красные окружности), следующие 32 — реагируют на яблоки (зелёные окружности), и последние 4 — принимают данные о нахождении границ поля относительно игрока. Назовём эти 68 сканера входными нейронами будущей нейронной сети (рецепторный слой).
Длина первых 64 сканеров 1000px, остальные 4 соответствуют делению поля пополам по соответствующей грани симметрии
 Сектор (1/4) области видимости ИИ
Сектор (1/4) области видимости ИИ

На рисунке: входные нейроны, получающие значения со сканеров
Значения на сканерах нормируется, т.е. приводится к диапазону [0, 1], причем чем ближе пересекающий сканер объект находится к игроку, тем большее значение передаётся сканеру.
Итак, для обучения НС было принято использовать алгоритм трассировки (опорных путей).
Примечание: в целях упрощения процесса обучения опущено построение матриц следование
Приступим:
Выполнив приведённый выше алгоритм, получим нейронную сеть, представленную на рисунке ниже
* Но это ещё не всё. Важно правильно интерпретировать результат, а именно (Y — массив выходных нейронов):
Таким образом, мы создали и автоматически обучили нейронную сеть, которая лежит в основе ИИ игрока на gif'ке вверху статьи
Весть код доступен (реализация игры и ИИ) по ссылке: Ссылка на гитхаб Ivan753/Learning
На этом всё. Спасибо за внимание!
В данной статье мы разработаем нейронную сеть, которая сможет на неплохом уровне проходить созданную специально для неё игру.
Примечание: данная статья не объясняет термин "нейронная сеть" и всё, что с ним связано, а также не предоставляет базовую информацию об обучении сети методом трассировки. Рекомендуем кратко ознакомиться с этими понятиями до прочтения статьи
Начало: описание правил игры
Цель — словить как можно больше кругов с зелёным ободком, избегая кругов с красным.
Условия:
- Красных окружностей вылетает на поле в два раза больше, чем зелёных;
- Зелёные окружности остаются в пределах поля, красные — вылетают за пределы и ликвидируются;
- Зелёный и красные окружности могут сталкиваться и отталкиваться с себе подобными;
- Игрок — жёлтый шар на экране, может передвигаться в пределах поля.
После соприкосновения шар пропадает, а игроку начисляются соответствующие очки.
Далее: проектируем ИИ
Рецепторы
Для того, чтобы ИИ смог принять решение, куда двигаться игроку, нужно для начала получить данные об окружающей среде. Для этого создадим специальные сканеры, представляющие из себя прямые линии. Первый сканер расположен под углом 180 градусов по отношению к нижней границе поля.
Их будет 68: первые 32 — реагируют на бомбы (красные окружности), следующие 32 — реагируют на яблоки (зелёные окружности), и последние 4 — принимают данные о нахождении границ поля относительно игрока. Назовём эти 68 сканера входными нейронами будущей нейронной сети (рецепторный слой).
Длина первых 64 сканеров 1000px, остальные 4 соответствуют делению поля пополам по соответствующей грани симметрии
Сектор (1/4) области видимости ИИНа рисунке: входные нейроны, получающие значения со сканеров
Значения на сканерах нормируется, т.е. приводится к диапазону [0, 1], причем чем ближе пересекающий сканер объект находится к игроку, тем большее значение передаётся сканеру.
Алгоритм для получения данных сканерами и его реализация на JS
Итак, сканер — прямая. У нас есть координаты одной из её точек (координаты игрока) и угол относительно оси OX, вторую точку мы можем получить, используя тригонометрические функции sin и cos.
Отсюда получаем направляющий вектор прямой, а значит можем построить канонический вид уравнения этой прямой.
Чтобы получить значение на сканер, нужно посмотреть, пересекает ли какой-нибудь шар эту прямую, а значит, нужно представить уравнение прямой в параметрическом виде и подставить всё это в уравнения окружности, последовательно для каждой окружности для поля.
Если привести эту подстановку к общему виду, получится параметрической уравнение относительно a, b и с, где эти переменные — коэффициенты квадратного уравнения, начиная с квадрата соответственно.
Предлагаем читателю более подробно ознакомиться с этим алгоритмом самостоятельно, используя простейшие определения линейной алгебры
Ниже представлен код сканеров
Отсюда получаем направляющий вектор прямой, а значит можем построить канонический вид уравнения этой прямой.
Чтобы получить значение на сканер, нужно посмотреть, пересекает ли какой-нибудь шар эту прямую, а значит, нужно представить уравнение прямой в параметрическом виде и подставить всё это в уравнения окружности, последовательно для каждой окружности для поля.
Если привести эту подстановку к общему виду, получится параметрической уравнение относительно a, b и с, где эти переменные — коэффициенты квадратного уравнения, начиная с квадрата соответственно.
Предлагаем читателю более подробно ознакомиться с этим алгоритмом самостоятельно, используя простейшие определения линейной алгебры
Ниже представлен код сканеров
Ball.scaners: { //сканеры length: 1000, i: [], //значения на сканерах get_data: function(){ //Ball.scaners.get_data / Получение данных со сканеров var angl = 0; var x0 = Ball.x, var y0 = Ball.y; var l = Ball.scaners.length; for(let k = 0; k < 32; k++){ x1 = l*Math.cos(angl), y1 = l*Math.sin(angl); Ball.scaners.i[k] = 0; for(i = 0; i < bombs.length; i++){ if(((k >= 0) && (k <= 8) && (bombs[i].x < x0) && (bombs[i].y < y0)) || ((k >= 8) && (k <= 16) && (bombs[i].x > x0) && (bombs[i].y < y0)) || ((k >= 16) && (k <= 24) && (bombs[i].x > x0) && (bombs[i].y > y0)) || ((k >= 24) && (k <= 32) && (bombs[i].x < x0) && (bombs[i].y > y0))){ //Проверка областей видимости сканеров var x2 = bombs[i].x, y2 = bombs[i].y; var p = true; //проверка на наличие решения var pt = true; //проверка на наличие ДВУХ корней var t1, t2; var a = x1*x1 + y1*y1, b = 2*(x1*(x0 - x2) + y1*(y0 - y2)), c = (x0 - x2)*(x0 - x2) + (y0 - y2)*(y0 - y2) - bombs[i].r*bombs[i].r; //------------------------------Проверка восьми возможных случаев if((a == 0) && (b != 0)){ t = -c/b; pt = false; } if((a == 0) && (b == 0)){ p = false; } if((a != 0) && (b != 0) && (c == 0)){ t1 = 0; t2 = b/a; } if((a != 0) && (b == 0) && (c == 0)){ t1 = 0; pt = false; } if((a != 0) && (b == 0) && (c != 0)){ t1 = Math.sqrt(c/a); t2 = -Math.sqrt(c/a); } if((a != 0) && (b != 0) && (c != 0)){ var d = b*b - 4*a*c; if(d > 0){ t1 = (-b + Math.sqrt(d))/(2*a); t2 = (-b - Math.sqrt(d))/(2*a); } if(d == 0){ t1 = -b/(2*a); } if(d < 0){ p = false; } } //----------------------------------- if(p == true){ if(pt == true){ let x = t1*x1 + x0; let y = t1*y1 + y0; let l1 = Math.pow((x - Ball.x), 2)+Math.pow((y - Ball.y), 2); x = t2*x1 + x0; y = t2*y1 + y0; let l2 = Math.pow((x - Ball.x), 2)+Math.pow((y - Ball.y), 2); if(l1 <= l2){ Ball.scaners.i[k] += 1 - l1/(l*l); }else{ Ball.scaners.i[k] += 1 - l2/(l*l); } }else{ let x = t1*x1 + x0; let y = t1*y1 + y0; Ball.scaners.i[k] += 1 - (Math.pow((x - Ball.x), 2)+Math.pow((y - Ball.y), 2))/(l*l); } }else{ Ball.scaners.i[k] += 0; } }else{ continue; } } angl += Math.PI/16; } //!---------------Для зелёных for(k = 32; k < 64; k++){ x1 = l*Math.cos(angl), y1 = l*Math.sin(angl); Ball.scaners.i[k] = 0; for(i = 0; i < apples.length; i++){ if(((k >= 32) && (k <= 40) && (apples[i].x < x0) && (apples[i].y < y0)) || ((k >= 40) && (k <= 48) && (apples[i].x > x0) && (apples[i].y < y0)) || ((k >= 48) && (k <= 56) && (apples[i].x > x0) && (apples[i].y > y0)) || ((k >= 56) && (k <= 64) && (apples[i].x < x0) && (apples[i].y > y0))){ var x2 = apples[i].x, var y2 = apples[i].y; var p = true; //проверка на наличие решения var pt = true; //проверка на наличие ДВУХ корней var t1, t2; var a = x1*x1 + y1*y1, b = 2*(x1*(x0 - x2) + y1*(y0 - y2)), c = (x0 - x2)*(x0 - x2) + (y0 - y2)*(y0 - y2) - apples[i].r*apples[i].r; //------------------------------Проверка восьми возможных случаев if((a == 0) && (b != 0)){ t = -c/b; pt = false; } if((a == 0) && (b == 0)){ p = false; } if((a != 0) && (b != 0) && (c == 0)){ t1 = 0; t2 = b/a; } if((a != 0) && (b == 0) && (c == 0)){ t1 = 0; pt = false; } if((a != 0) && (b == 0) && (c != 0)){ t1 = Math.sqrt(c/a); t2 = -Math.sqrt(c/a); } if((a != 0) && (b != 0) && (c != 0)){ var d = b*b - 4*a*c; if(d > 0){ t1 = (-b + Math.sqrt(d))/(2*a); t2 = (-b - Math.sqrt(d))/(2*a); } if(d == 0){ t1 = -b/(2*a); } if(d < 0){ p = false; } } //----------------------------------- if(p == true){ if(pt == true){ let x = t1*x1 + x0; let y = t1*y1 + y0; let l1 = Math.pow((x - Ball.x), 2)+Math.pow((y - Ball.y), 2); x = t2*x1 + x0; y = t2*y1 + y0; let l2 = Math.pow((x - Ball.x), 2)+Math.pow((y - Ball.y), 2); if(l1 <= l2){ Ball.scaners.i[k] += 1 - l1/(l*l); }else{ Ball.scaners.i[k] += 1 - l2/(l*l); } }else{ let x = t1*x1 + x0; let y = t1*y1 + y0; Ball.scaners.i[k] += 1 - (Math.pow((x - Ball.x), 2)+Math.pow((y - Ball.y), 2))/(l*l); } }else{ Ball.scaners.i[k] += 0; } }else{ continue; } } angl += Math.PI/16; } Ball.scaners.i[64] = (1000 - Ball.x) / 1000; //левая граница Ball.scaners.i[65] = Ball.x / 1000; //правая граница Ball.scaners.i[66] = (500 - Ball.y) / 500; //верхняя граница Ball.scaners.i[67] = Ball.y / 500; //нижняя граница } }
Проектирование нейронной сети
Итак, для обучения НС было принято использовать алгоритм трассировки (опорных путей).
Примечание: в целях упрощения процесса обучения опущено построение матриц следование
Приступим:
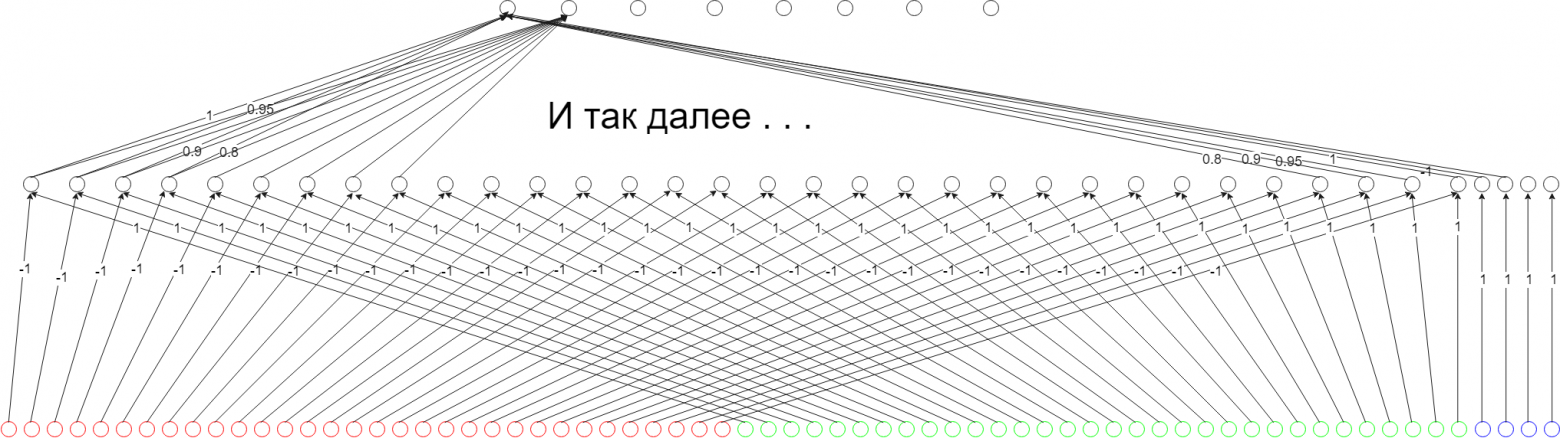
- На выходе сети представим 8 нейронов, отвечающих за направления: первый — лево, второй — лево+верх, третий — верх, четвёртый — верх+право, пятый — право и тд;
- Пусть положительное значение на нейроне значит, что следует двигаться в сторону, которая за ним закреплена, а отрицательное — обратное;
- Нам важно как-то объединить значения со сканеров, находящихся под одним углом относительно нижнего края поля. Так как при отрицательно выходе ИИ будет отталкиваться от этого направления, введём дополнительный слой (скрытый, между входным и выходным), который будет складывать значения нейронов, отражающих попарно соответствующие сканеры, причём значения с красных нейронов будем брать со знаком "-";
- Очевидно, что на движение влево главный образом влияет информация, которая находится слева от игрока (не только, но это будет учтено позже (*)) — значит связываем 8 нейронов скрытого слоя, находящихся слева, с нейроном, отвечающим за движение влево. Связи устанавливаем так: нейрон, отвечающих сканеру, расположенному параллельно границе поля, назначается вес 1, далее соседним двум нейронам назначается вес 0.95, соседним через одного вес 0.9, и, наконец, крайним в данном секторе вес 0.8;
- Нейроны границ тоже учитываем: проводим к выходам связи от тех граничных нейронов, границы которых могу влиять на движение.
- То же самое проделывает с оставшимися семью нейронами выходного слоя.
Выполнив приведённый выше алгоритм, получим нейронную сеть, представленную на рисунке ниже
* Но это ещё не всё. Важно правильно интерпретировать результат, а именно (Y — массив выходных нейронов):
Ball.v.x = -(Y[0] - Y[4]) + (-(Y[1] - Y[5]) + (Y[3] - Y[6]))*0.5; Ball.v.y = -(Y[2] - Y[6]) + (-(Y[3] - Y[7]) + (Y[5] - Y[1]))*0.5;
Таким образом, мы создали и автоматически обучили нейронную сеть, которая лежит в основе ИИ игрока на gif'ке вверху статьи
Весть код доступен (реализация игры и ИИ) по ссылке: Ссылка на гитхаб Ivan753/Learning
На этом всё. Спасибо за внимание!
