Приветствую вас, глубокоуважаемые!
«Гидроакустик гидрофон пропил» ©
С прошлых наших статей ситуация коренным образом не изменилась: у нас по прежнему большая часть мирового
Итак, усиливаю как умею.
Сегодня я подробно и «на пальцах» расскажу о разных типах подводных навигационных систем согласно устоявшейся неправильной классификации, какие они бывают, в чем плюсы и минусы, в общем, в каком случае куда бежать, что нажимать и куда крутить.
Ахтунг: в статье могут присутствовать следовые количества матана!

Если спокойные воды вашей души всколыхнул этот сигнал, добро пожаловать под кат!
Когда речь идет[1] об акустических системах позиционирования, их тип всегда обозначается как USBL, LBL, SBL. «BL» здесь означает Baseline, т.е. базовая линия. Вот с этого предлагаю и начать.
Что такое базовая линия?
Базовая линия образуется двумя опорными точками, взаимное расположение которых известно в заданный момент времени. На первой картинке показано, как эти опорные точки вместе с искомой определяют множество пространственных треугольников (
 ), основанием которого и является базовая линия (
), основанием которого и является базовая линия ( ).
). 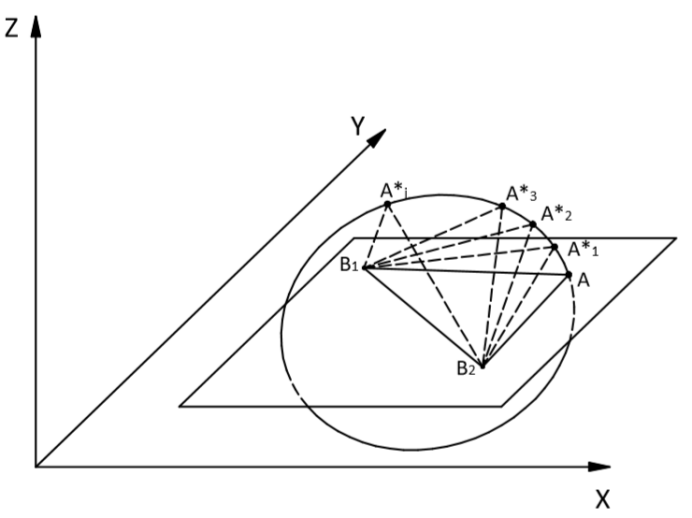
Базовая линия определяет искомую точку на окружности
Треугольник определяется:
- либо по основанию и двум дальностям, измеренным из обеих опорных точек до искомой, в этом случае мы говорим о трилатерации;
- либо по основанию и двум углам, что именуется триангуляцией.
Лирическое отступление
Пока писал статью, задумался о том, как я вообще в это ввязался.
Вспомнил, что в детстве я посмотрел какое-то кино, где в постапокалиптическом мире люди охотились на драконов (которые и послужили причиной апокалипсиса), для чего вычисляли их местоположение в воздухе, расставляли на земле «маяки», и я четко усвоил с тех пор, что для полной картины маяков нужно было три. В подростковом мозгу прочно засело слово «триангуляция». Помню, что подумал тогда: как круто было бы быть разработчиком таких штук.
Cобственно, ну вот я и он!
Вспомнил, что в детстве я посмотрел какое-то кино, где в постапокалиптическом мире люди охотились на драконов (которые и послужили причиной апокалипсиса), для чего вычисляли их местоположение в воздухе, расставляли на земле «маяки», и я четко усвоил с тех пор, что для полной картины маяков нужно было три. В подростковом мозгу прочно засело слово «триангуляция». Помню, что подумал тогда: как круто было бы быть разработчиком таких штук.
Cобственно, ну вот я и он!
Определение треугольника означает определение координат искомой точки.
Использование треугольников в определении местоположения берет свое начало из глубины веков и первые упоминания находятся аж в работах Фалеса[2] и Евклида[3].
Одна базовая линия дает множество треугольников, вершины которых лежат на окружности. И для определения местоположения искомой точки в n-мерном пространстве требуется n+1 базовых линий. Число требуемых базовых линий может быть снижено до n, в случае когда известна одна из координат искомой точки, например глубина (или высота
Приведенное определение базовой линии обычно относят к методам триангуляции и трилатерации, однако его можно расширить и на метод мультилатерации[4].
В этом случае углы и дальности до искомой точки неизвестны, но известна разность последних (например, неизвестен момент излучения сигнала искомым объектом, но моменты его прихода на обе опорные точки известны и измерены по синхронизированным часам, т.е. известна задержка между приходом сигнала на опорные точки).
Время прихода сигнала умноженное на скорость распространения сигнала принято называть псевдодальностью.
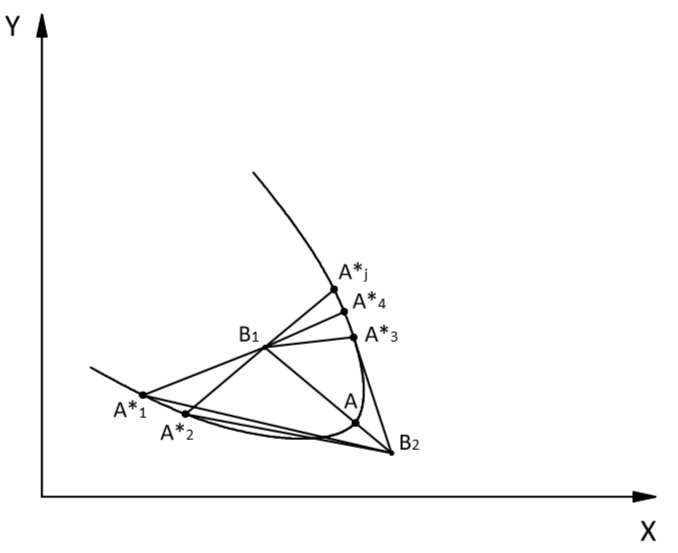
Базовая линия при мультилатерации определяет искомую точку на гиперболе
Из картинки выше легко видеть, что таким образом может быть определено бесконечное множество треугольников (
), вершины которых, представляющие положение искомой точки, лежат на гиперболе. При этом, опорные точки будут фокусами гиперболы. Здесь, также как и в случае триангуляции положение искомой точки полностью определяется n+1 базовыми линиями для n-мерного пространства.
Плохое слово для экспортного контроля
Дело в том, что в зависимости от места выработки координат есть два класса систем:
- собственно навигационные (прям так и называются — navigation systems), где координаты вырабатываются на самом объекте (как например, в GPS).
- системы слежения (surveillance), когда например есть какой-то маячок на объекте и мы его пеленгуем.
Так вот, для экспортного контроля это слово очень плохое и не подходящее, что было трагически проверено на собственном опыте. Объяснить бюрократической машине что это «совсем не то о чем вы подумали» очень непросто и с тех пор мы такие системы называем системами позиционирования (positioning).
Зануд моде он
В виду неоднозначностей перевода, стоит упомянуть, что системы позиционирования не стоит путать например, с т.н. динамическим позиционированием у судов, системами динамического позиционирования (англ. DP, Dynamic positioning), это в целом из смежной области, но означает немного другое — системы, позволяющие судну сохранять свое географическое положение и ориентацию (курс), «зависнуть» на одном месте.
Общепринятая классификация по относительному размеру базовой линии и ее неполнота
Теперь вернемся к первым буквам из аббревиатур USBL, LBL и SBL. Они определяют относительный размер базовых линий.
В общем случае, он определяется относительно максимального размера возможной траектории позиционируемого объекта.
Если объяснять совсем просто, то вот к примеру мы
Зануд моде он
Для всей строгости нужно упомянуть, что траектория водолаза имеется в виду в системе координат, связанной с измерительной базой. Т.е. если мы следим за водолазом с резиновой лодки судна обеспечения и дрейфуем вместе с ним, то в принципе можем надрейфовать несколько километров (в реальности такого конечно с водолазами быть не может, а вот с телеуправляемым роботом — вполне). И оценивается именно траектория относительно нашего судна.
Понятно, что классификационный признак так себе, и я полностью согласен. Но тем не менее, общепринятая классификация устроена именно так. И различают:
- USBL, ultra-short baseline — ультракороткобазисные системы, где размеры базовых линий много меньше траектории позиционируемого объекта и
- SBL, short baseline — короткобазисные системы, где размеры базовых линий сопоставимы с траекторией позиционируемого объекта,
- LBL, long baseline — длиннобазисные системы, где размеры базовых линий значительно превышают размеры траектории позиционируемого объекта.
Есть определенная неоднозначность в выборе класса между коротко- и длиннобазисными системами, и часто в качестве одного из признаков именно короткобазисных систем указывают жесткую связь опорных элементов друг с другом — например, когда они зафиксированы на судне. Опорные элементы же длиннобазисной системы кинематически никак не связаны, т.е. изменения их положений в пространстве некоррелированы.
Рассмотрим теперь все три типа и некоторые их комбинации более подробно с точки зрения их сильных и слабых сторон.
Ультракороткобазисные системы
Как видно из названия, базовые линии в ультракороткобазисных системах (УКБ системах) много меньше траектории движения позиционируемого объекта.
Как правило, в большинстве существующих(например, эта[5], эта[6] и вот эта[7])УКБ систем, размер базовых линий составляет от единиц до десятков сантиметров. Большинство из них представляют собой угломерные системы — т.е. системы, определяющие угол прихода сигнала маяка-ответчика или пингера.
С точки зрения компоновки такие системы состоят из:
— базовой станции — устройства, содержащего в себе многоэлементную приемную антенну, отдельные элементы которой образуют или фазированную антенную решетку, в этом случае угол прихода определяется из разности фаз приходящего сигнала между отдельными элементами, или набор базовых линий, так же образуемый парами отдельных элементов, в этом случае угол прихода определяется по разным задержкам прихода сигнала на элементы;
Дабы не теребить авторские права на картинки, я приведу здесь в качестве примера базовой станции нашу Zima-Base:
На столе:

В рабочем моменте:

— маяков-ответчиков, отвечающих на запрос базовой станции, что позволяет в свою очередь определять время распространения сигнала между маяком и базовой станцией (наклонную дальность) или пингеров, в отличие от маяков-ответчиков, излучающий сигнал через равные промежутки времени. Пингер может быть заранее синхронизирован с базовой станцией, что позволяет производить одностороннее измерение времени распространения.
В качестве примера опять приведу маяк-ответчик нашей системы Zima:
В автономном исполнении с батарейной канистрой:

На борту ТНПА:

Существуют также системы, где ответчики электрически сопряжены с базовой станцией и запросный сигнал подается в виде электрического стробирующего импульса.
Таким образом, класс УКБ систем представлен достаточно обширным диапазоном различных конкретных исполнений, и зачастую причисление какой-либо системы к УКБ не дает достаточно информации о конкретном способе ее функционирования.
На следующей картинке иллюстрируется обобщенный принцип работы УКБ систем.

Демонстрация принципа работы систем, определяющих угол прихода сигнала
На рисунке выше показана пара преобразователей антенной решетки, на которые приходит плоский фронт сигнала. Из известного расстояния
 между преобразователями и измеряемой задержки
между преобразователями и измеряемой задержки  определяется угол
определяется угол  прихода сигнала.
прихода сигнала.К очевидным преимуществам УКБ систем можно отнести малый требуемый состав оборудования и быстрое развертывание системы.
В общем случае ответчик или пингер может быть
В некоторых практических случаях применение УКБ систем является безальтернативным. Например, когда ведется поиск чего-нибудь
Однако, у УКБ систем есть определенные серьезные недостатки. К примеру, для определения положения позиционируемого объекта в абсолютных координатах сама базовая станция должна быть полностью определена в пространстве: требуется знать не только ее географическое положение но и ориентацию массива приемников в пространстве: азимутальный угол, углы крена и дифферента.
То есть, с конструктивной точки зрения, УКБ система должна иметь в своем составе не только многоэлементную антенную решетку, которая сама по себе является достаточно сложной конструктивно, но и устройства, позволяющие определять ее положение в пространстве — датчики углов наклона по двум горизонтальным осям и датчик курса — магнитный или GNSS-компас. Если пеленгационная антенна устанавливается на чем-то подводном, то соответственно возможность использования GNSS-компаса закрывается.
Более того, т.к. положение искомого объекта оценивается либо по двум углам прихода сигнала (горизонтальный и вертикальный) либо по горизонтальному углу и глубине (что модно и прогрессивно), передаваемой в сигнале ответчика или пингера, то очевидно, что конечная угловая точность
 системы обеспечит возрастающую с дальностью как
системы обеспечит возрастающую с дальностью как  ошибку определяемого положения позиционируемого объекта, растущую с расстоянием пропорциональную тангенсу угловой ошибки, что проиллюстрировано на следующей картинке:
ошибку определяемого положения позиционируемого объекта, растущую с расстоянием пропорциональную тангенсу угловой ошибки, что проиллюстрировано на следующей картинке:
Влияние угловой точности УКБ систем на ошибку определения местоположения позиционируемого объекта
На рисунке выше показан разброс определяемого местоположения источника сигнала. Одна из полуосей эллипса
 определяется погрешностью измерения дистанции, а другая, как , где D — дистанция (наклонная дальность) до источника.
определяется погрешностью измерения дистанции, а другая, как , где D — дистанция (наклонная дальность) до источника.Более того, в случае неоднозначности и невозможности гарантированной идентификации прямого луча (луч — читай фронт сигнала, прямым называем тот, который пришел непосредственно от источника, ни от чего не отразившись), УКБ системы в целом очень сильно подвержены влиянию многолучевого распространения, в особенности если присутствуют отражения от береговой линии или каких-либо элементов подводного ландшафта.
Другими словами, при наличии мощных отраженных сигналов пришедших с других направлений (вплоть до противоположенных) УКБ система не застрахована от принятия такого сигнала за прямой (так как в общем виде эта задача неразрешима — сумма отраженных сигналов может быть мощнее, «громче» прямого и такое иногда бывает на практике), что приводит к совершенно неверным результатам решения навигационной задачи.
Более новые системы используют прямое измерение глубины ответчика или пингера, в то время как старые системы определяют положение по двум углам. Дело в том, что вертикальный угол имеет наименьшую достоверность определения, т.к. звук в целом может претерпевать многократные отражения дно-поверхность, и его определение релевантно лишь на самых малых дистанциях. Это показано на картинке ниже, где на верхнем изображении приведен вертикальный разрез канала, и видно, что при определении вертикального угла по одному из отраженных сигналов, ошибка может быть совершенно неприемлемой. В то же время, на нижней части рисунка, где показан вид сверху, видно, что все отраженные сигналы приходят с одного и того же горизонтального направления.
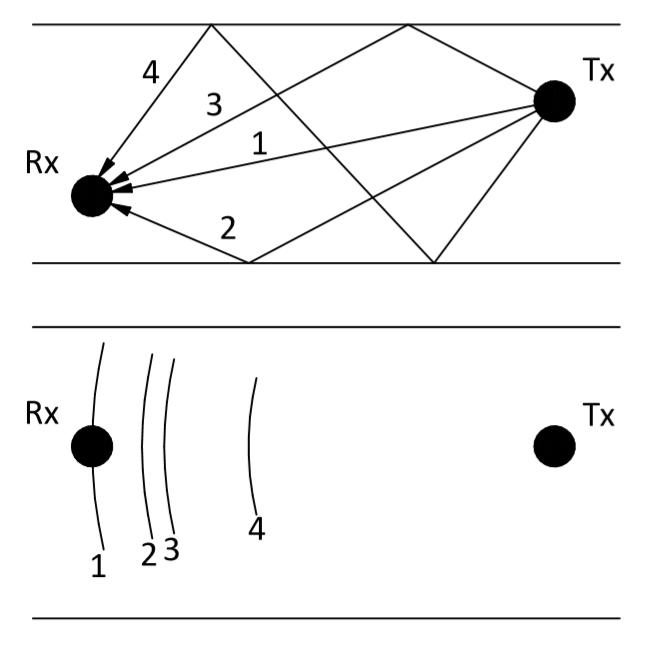
Разная достоверность при определении горизонтального и вертикального углов в УКБ системах
Резюмируя обсуждение УКБ систем можно сказать, что область их применения — там, где сложно, неоправданно или невозможно применять другие типы навигационных систем и систем позиционирования.
Производители современных УКБ систем сообщают об угловой точности их изделий до 0.03° (1σ)[8].
Их преимущество: скорость развертывания и универсальность.
По опыту общения с пользователями могу сказать, что все кругом хотят только УКБ как раз из-за быстроты развертывания. И сколько я не объясняю, сколько ни пишу — все кивают, но все равно хотят использовать УКБ. Как говорится: «не забывайте страдать».
Некоторые неискушенные вообще используют аббревиатуру USBL как обозначение любой подводной системы позиционирования.
Зануд моде он
Еще более курьезный курьез — когда любую гидроакустическую штуку называют сонаром. Мы же грамотные ребята и помним, что сонар — это как радар, только звуком, то есть гидролокатор, но это — совсем другая история.
Коротокобазисные системы
Короткобазисные системы в подавляющем большинстве случаев размещаются на корпусах специализированных судов. То есть размеры базовых линий сопоставимы с размерами судна.
В настоящее время точность УКБ систем достаточно высока, а удобство применения выглядит гораздо более выгодным чем для КБ, что привело в вытеснению КБ систем из широкого применения, и к задачам, решаемым КБ системами относятся сейчас лишь такие, где имеют место специфические условия, не позволяющие применять УКБ системы.
Однако, в прошлом КБ применялись например, для сопровождения батискафа Триест-1 к месту гибели подводной лодки ВМС США «Трешер» (англ. USS Thresher). КБ система SHARPS SBL применялась в Вудсхоловском океанографическом институте (англ. Woods hole Oceanographic Insititution) для сопровождения глубоководного аппарата JSON к его опускной клети MEDEA, сообщается о достигнутой точности позиционирования в 0.09 м[9].
Из современных КБ систем можно отметить вот эту[10], позиционирующуюся производителем как “Подводный GPS”, и распространяющуюся в виде конструктора.
Чтобы глазу было за что зацепиться и ощутить всю прелесть и «простоту» развертывания, приведу пару картинок с наших недавних испытаний прототипа КБ системы для парковки автономного подводного аппарата:

Рама из алюминиевого профиля — это и есть короткая база. Можете представить удобство спуска на воду этой конструкции.

Справедливости ради стоит сказать, что по всей идеологии работы, спускаться она должна только один раз. Нам же на испытаниях пришлось ее еще и поднимать — профиль стоит денег, да и гидрофоны на дороге не валяются.
Резюмируя обзор КБ систем, отметим, что:
К плюсам КБ систем относятся:
- быстрота развертывания и мобильность (системы как правило смонтированы на судне);
- в среднем более высокая точность по сравнению с УКБ системами (хотя, однако, нужно иметь в виду, что некоторые высококлассные УКБ, например [8], в целом показывают большую точность позиционирования чем некоторые более простые КБ типа уже упомянутого Waterlinked GPS[10]).
К минусам КБ можно отнести те же минусы, что присущи и УКБ системам, а именно:
- необходимость определения ориентации измерительной базы (базовых линий) — по углам курса, крена и дифферента помимо привязки к абсолютному географическому положению;
- коррелированность ошибок определения времен прихода на элементах базы в виду их кинематической связи, например, вследствие качки
- и, так как КБ в общем может работать как угломерная система, она также подвержена проблеме снижения точности при удалении позиционируемого объекта от базы.
- также можно отнести к минусам и сложность (читай «цену») первоначальной установки системы на судно.
Длиннобазисные системы
Это мои любимый тип систем. ДБ — означает Длинная база
ДБ системы обеспечивают максимальную точность определения местоположения позиционируемого объекта
ДБ системы значительно менее подвержены ошибкам, связанными с многолучевым распространением как будет показано ниже — при неверном определении прямого луча разность времени его хода может составлять небольшую величину (единицы метров), что может быть легко скомпенсировано наличием избыточных опорных точек, в самом плохом случае возникнет лишь ошибка определения местоположения порядка разности хода луча, тогда как УКБ могла бы оценить угол прихода этого луча, который может оказаться практически каким угодно, что в свою очередь приведет к совершенно неприемлемой ошибке.
Из минусов ДБ систем основные — это трудоемкость установки, что особенно актуально в случае с донной базой — во-первых донные элементы должны обеспечивать достаточную автономность, чтобы максимизировать временной интервал обслуживания, во-вторых, т.к. как правило такие системы работают на значительных глубинах (от 500 метров и более), то предъявляются дополнительные требования к нормобарическим корпусам, в-третьих, возникает дополнительная проблема снятия базы по завершении работ.
И наконец, после установки базы, местоположение ее элементов должно быть определено с геодезической точностью, например, с помощью метода виртуальной ДБ или УКБ систем по большой выборке измерений.
Все эти операции требуют специализированного дорогостоящего оборудования и труда многих высококвалифицированных специалистов.
Значительно проще дело обстоит с плавучей базой. Гидроакустические приемные, передающие или приемопередающие буи могут быть установлены практически с любого плавсредства (мы свои за 15 минут с весельной надувной лодки ставим), в виду простоты установки и снятия, опорные элементы могут иметь небольшую автономность, а их корпуса могут в целом выполнятся в атмосферном исполнении.
Стоит сказать, что применение плавучей базы сильно осложняется при работе на больших глубинах по двум причинам: первая заключается в сложности установки якоря, которая в принципе решается моторизированным плавучим основанием, которое обеспечивает автоматическое сохранение географического положения, а вторая более серьезная, и она, зачастую, исключает применение плавучей базы при работе на больших глубинах — наличие полного внутреннего отражения сигнала от слоя скачка (имеется в виду слой скачка скорости звука. Раздел слоев воды с разной плотностью, от которого звук может полностью отражаться).
Единственное решение здесь состоит в выносе гидроакустической антенны под слой скачка, что в свою очередь создает еще больше проблем — сложность топопривязки гидроакустической антенны, вес кабеля, сильное усложнение конструкции и вот мы опять там же, откуда и начинали.
Традиционно, в качестве визуального примера привожу нашу ДБ систему RedWAVE, буи (водолаз уникальный и в комплект не входит):

И навигационный приемник:

Про эту систему у нас есть целых несколько статей
Системы на основе виртуальной длинной базы
Системы на основе т.н. виртуальной длинной базы [22][23][24] (ВДБ, англ. VLBL — virtual long baseline) достойны выделения в отдельную группу по конструктивным и компоновочным причинам.
Суть ВДБ систем состоит в том, что измерения наклонных дальностей до ответчика или времен прихода сигнала пингера производится в разных точках пространства, такой подход справедлив при соблюдении одного условия: позиционируемый объект сохраняет неподвижное положение, а движущаяся опорная точка формирует элементы навигационной базы производя или измерения дистанции до ответчика или фиксируя времена прихода сигнала пингера из разных положений.
Данный класс навигационных систем при всей своей кажущейся ограниченности имеет широчайшие перспективы: во-первых, не требуется никакого сложного оборудования, как например в случае с УКБ системами — задача решается номинально только при помощи двух приемопередатчиков или при помощи передатчика и приемника, которые не требуется каким-либо специальным образом ориентировать в пространстве. В случае с пингером есть возможность организации кооперативного поиска пингера при помощи стаи автономных надводных аппаратов. Что особенно актуально в случае поиска затонувших объектов (например, потерпевших крушение самолетов или кораблей) на теоретически неограниченной площади. Также, одним из способов первоначального определения местоположения элементов донной длинной базы является метод ВДБ.
В качестве примера приведу наш демонстрационный проект (даже два!) виртуальной длинной базы на двух микромодемах uWAVE.
Первый проект описан в одной из наших предыдущих статей. Там модем, GNSS модуль и радиомодуль объединялись при помощи платы на STM32.
В новой реинкарнации этого проекта код переписан на Arduino UNO, а решение навигационной задачи выполняется в приложении с открытым кодом.
Комбинированные системы
Комбинированные системы обычно содержат в себе элементы двух и более классов систем. Так, например, имеют место технические решения описываемые в обзоре [1] совмещающие в себе развертываемую длинную базу и короткую базу, смонтированную на судне, основна задача которой позиционирование элементов длинной базы. Очевидно, что позиционирование элементов длинной базы также может осуществляться и при помощи УКБ систем.
В целом, можно констатировать, что выбор конкретной схемы синтеза определяется, как ни странно, решаемой задачей.
В подавляющем числе случаев, целью синтеза разных классов систем является первоначальное позиционирование опорных точек длинной базы.
Экзотика
Здесь лишь кратко коснемся некоторых классов систем, как только косвенно и формально относящихся к теме статьи.
Среди них акустические системы основанные на счислении пути строятся на т.н. доплеровских лагах, устройствах измеряющих скорость движения позиционирующегося объекта относительно дна путем излучения акустического сигнала в как минимум трех узконаправленных лучах и последующего их приема. Перемещение объекта относительно дна приводит к возникновению доплеровского сдвига частоты излученного сигнала, детектируемого на стадии приема.
Доплеровский сдвиг пересчитывается в проекции скорости по трем осям. В комбинации с показаниями датчика курса (компаса) и показаниями акселерометра формируется последовательность решений для местоположения объекта. Для инициирования данной последовательности требуется первоначального задание местоположения. Данный вид систем имеет в основном военное применение в виду относительной скрытности и автономности. Имеет все недостатки систем с исчислением пути (англ. Dead-reckoning) которые связаны с быстрым накоплением ошибки. Т.е. точность падает со временем.
Еще бывает экзотика-экзотика и совсем экзотика. К первым я бы отнес системы, основанные на анализе снимков дна (КАРЛ!), а ко вторым — навигацию по флуктуациям магнитного поля (КАРЛ!!!). Относительно практической применимости и тех и других, хочется, как говорят, «выразить серьезную озабоченность».
В сухом остатке
Итак, в существующей классификации выделяют три основных класса гидроакустических навигационных систем:
- Ультракороткобазисные, в которых положение маяка-ответичика или пингера определяется путем измерения относительных фаз прихода сигнала или задержек при помощи близко расположенных акустических приемников. Такие системы требуют предварительной калибровки, комплекта дополнительных сенсоров, чувствительны к конкретному паттерну многолучевости, но обладают максимальной мобильностью. Автор[1] сообщает о точности УКБ систем порядка 0.5-0.2% от наклонной дальности.
- Короткобазисные, где положение позиционируемого объекта определяется по трем и более относительным временам прихода (или дистанциям) от объекта до трех и более опорных точек, зафиксированных на корпусе судна; Данные системы как самостоятельные в настоящее время распространены слабо, требуют сложной процедуры установки на судно-носитель, и, как сообщает тот же автор[1], обеспечивают точность в среднем 0.5% от глубины места;
- Длиннобазисные, в которых местоположение объекта определяется по трем и более наклонным дальностям (или разностям), измеренным до трех и более широко разнесенных опорных точек. Данный класс систем сложен в применении и обслуживании, может быть воплощен в двух сильно отличающихся вариантах — донная и плавучая базы, и, по данным автора[1] обладает максимальной точностью в сравнении с остальными классами систем — порядка 0.1% от глубины места. Там же, в уже затертом мной обзоре Vickery сообщаются абсолютные величины ошибки определения местоположения позиционируемого объекта для систем, работающих в разных частотных диапазонах — от 2-3 метров для низкочастотных систем (до 15 кГц), до 1 метра для среднечастотных систем (19-36 кГц) и до 5 см для систем, работающих на частотах от 50 до 110 кГц.
P.S.
Большое спасибо за внимание, будем рады выслушать конструктивную критику и ответить на вопросы.
Если данная статья вызовет интерес среди читателей, то в следующей я планирую рассказать про правильную классификацию подводных навигационных систем.
Если все пойдет совсем хорошо, то в еще одной статье я разберу несколько алгоритмов работы навигационных систем с примерами кода.
Список источников
- Vickery, K. (n.d.). Acoustic positioning systems. A practical overview of current systems. Proceedings of the 1998 Workshop on Autonomous Underwater Vehicles (Cat. No.98CH36290).
- Diogenes Laertius. The Lives and Opinions of Eminent Philosophers by Diogenes Laertius (Translation by Yonge, C. D.). London: George Bell and sons, 1905. Google books. Web. 01 Apr. 2019.
- Frankland, William B., The First Book of Euclid's Elements: With a Commentary Based Principally Upon that of Proclus Diadochus. Cambridge: at the University Press, 1905.
- Accuracy Limitations of Hyperbolic Multilateration Systems, Harry B. Lee, Massachusetts Institute of Technology, Lincoln Laboratory, Technical Note 1973-11, March 22, 1973
- evologics.de/usbl
- www.tritech.co.uk/media/products/usbl-tracking-system-micronnav.pdf
- www.ixblue.com/products/posidonia
- www.ixblue.com/sites/default/files/2018-02/Gaps.pdf
- Integrating Precision Relative Positioning Into JASON/MEDEA ROV Operations, Bingham et al., MTS Journal Spring 2006 (Volume 40, Number 1)
- waterlinked.github.io/docs/explorer-kit/introduction
- www.ixblue.com/sites/default/files/2019-01/Ramses%20-%20Datasheet.pdf
- evologics.de/web/content/16763?unique=cc5bc295cb0a4bf681a31de24fdb204f62169c2b&download=true
- github.com/ucnl/Docs/blob/master/RU/RedWAVE/RedWAVE_LBL_Deployment_maintenance_RedNAV_ru.pdf
- www.alseamar-alcen.com/sites/alseamar-alcen.com/files/pdf/products/fiche_205x292_gib-sar.pdf
- www.gps.gov/technical/ps/2008-SPS-performance-standard.pdf
- «The Global Navigation System GLONASS: Development and Usage in the 21st Century». 34th Annual Precise Time and Time Interval (PTTI) Meeting. 2002.
- download.esa.int/docs/Galileo_IOV_Launch/Galileo_factsheet_2012.pdf (PDF). ESA. 15 February 2013. Retrieved 8 December 2019.
- «Directions 2017: BeiDou's road to global service». GPS World. 6 December 2016.
- Derek Howse, Radar At Sea. Macmillan Press, Great Britain 1993. ISBN 1-55750-704-X
- ГОСТ Р 54025-2010 Система радионавигационная «Чайка». Приемные устройства. Требования к техническим характеристикам. Методы испытаний и требуемые результаты испытаний
- The Development of Loran-C Navigation and Timing, Gifford Hefley, U.S. National Bureau of Standards, Oct. 1972.
- M. B. Larsen, «Synthetic Long Baseline Navigation of Underwater Vehicles,» presented at Oceans 2000 MTS/IEEE Conference and Exhibition, 2000.
- JoÃo Saúde, Antonio Pedro Aguiar, Single Beacon Acoustic Navigation for an AUV in the presence of unknown ocean currents, IFAC Proceedings Volumes, Vol. 42, Issue 18, 2009, pp. 298-303, ISSN 1474-6670, ISBN 9783902661517, doi.org/10.3182/20090916-3-BR-3001.0057.
- Alexander Dikarev, Stanislav Dmitriev, Vitaliy Kubkin, Andrey Vasilenko. Position estimation of autonomous underwater sensors using the virtual long baseline method, International Journal of Wireless & Mobile Networks (IJWMN), Vol. 11, Issue 2, April 2019
Only registered users can participate in poll. Log in, please.
Нужна статья с «правильной» классификацией и разбором алгоритмов работы разных систем?
96.67%Да, давай29
3.33%Не, не надо1
30 users voted. 11 users abstained.
