Comments 43
habrastorage.org/webt/sn/ku/wv/snkuwvwnv1er4o_alcv1x3zvxyi.jpeg
Ну как минимум на чертеже винтов не хватает, возможно вы просто не успели их дорисовать?
А если представить, что винтов должно бы всего 6 то тогда конструкция вполне жизнеспособна, хоть и имеет ряд недостатков. Соосная схема винтов приводит к сильным завихрениям, в случае вращения в разные стороны, и большой потери мощности, которая будет тратиться на эти завихрения. Если парные винты крутить в одну и туже сторону, то все равно будет большая потеря тяговой мощности второго винта.
Мне кажется, здесь может теряться до 50%. Т.е. если в случае шести винтов, тяга будет слабее на целых 25% по сравнению с тягой гексакоптера с традиционной схемой расположения винтов.
Так же нужно будет подумать над углами расположения винтов вдоль удерживающей винт оси, Из за того что тяга винтов получится разной, скорее всего углы эти тоже должны быть разные, для пары винтов: верхний возможно должен быть отклонен чуть больше чем нижний в сторону.
Китай уже сразу обновление прошивки дал онлайн и подробную инструкцию и стоил на тысячу дороже. Вот тогда мы и рисовали красивые модельки)) Мне чертеж выше бартером на карбоне полилили даже)) но на том все и разбежались)

Если знаний достаточно, то все ок. А если человек не понимает, как работает цифровой гироскоп в паре с акселерометром, какой алгоритм фильтрует погрешности для правильного распределения мощности на двигатели? Там же с самоделкой делать нечего. Хотя, может быть уже абстракция достаточная для потребителя. И второй важный фактор — ваша плата до первого падения. Еще и летать надо уметь! А так или брать naza за 15к и лепить на свою креставину или быть очень сильно в теме. Квадриками как вторым хобби у меня не получилось заниматься)
Я вобще не про хоби а про конкуренцию с китаем, по моим прикидкам dji должен стоить 20-30 т.р, а он стоит 130 — 170 т.р
Никому он ничего не должен. Вы считаете только комплектуху в себестоимость?
А разработка? Я инженер и я негодую! ЗП тем кто это всё делал почему не считаете? А оснастка литьевая? И огромная куча доп расходов в процессе разработки. Не умеете вы в производство...
Одноразовые? Отделу разработки надо платить зарплату постоянно так-то) и в процессе разработки и после)И вы штучно, никогда не сделаете за 20 что-то хотя-бы похожее по характеристикам и размерам одновременно)
Соосная схема винтов приводит к сильным завихрениям, в случае вращения в разные стороны, и большой потери мощности, которая будет тратиться на эти завихрения.
Мне кажется, здесь может теряться до 50%
Зря вам это кажется. Я конечно не то чтоб дипломированный аэродинамик, но аэродинамику представляю очень неплохо. И насколько я в курсе, вращение соосных винтов в противоположных направлениях не только не вызывает дополнительных потерь, но наоборот вызывает повышение КПД. Потому как один винт вызывает приличную закрутку потока вокруг своей оси (на что уходит часть подводимой мощности), а второй противоположно вращающийся винт вызывает раскрутку оного потока обратно, полный КПД системы вырастает — разумеется при условии что два винта дают в сумме такую же тягу как один. Падение КПД двух соосных винтов происходит вовсе не из-за «завихрений», а потому что возрастает нагрузка на диск. Т.е. если мы будем выжимать из каждого винта такую же тягу (т.е. пытаться получить с того же сечения диска вдвое бОльшую тягу) то вот тогда КПД упадет. Но точно так же оно упадет если мы и с одного винта попробуем получить вдвое бОльшую тягу. В общем, надо корректно отделять мух от котлет.
Два соосных винта это, в теории, очень даже хорошо, ибо растит КПД (а не уменьшает его). Но возникают «накладные расходы» в виде увеличения массы моторов и винтов (два а не один) — что впрочем неплохо решается выбором вдвое мЕньшего по мощности и массе мотора, ну и появляется серьезно повышенная шумностью (ибо нижний винт работает в концевых вихрях верхнего винта) с чем бороться не особо выйдет. Зато, кроме повышения КПД, получаем еще и резервирование по мотору. Как-то так.
Очень приятно что хоть кто то готов подискутировать на эту тему. Возможно вы вытащили часть предложения из контекста и поэтому потерялась его суть целиком, поэтому попробую объяснить по другому.
Представим себе длинное, очень прочное плечо, параллельное горизонту (например длинной 3 метра) с одной стороны оно закреплено на креплении, позволяющем ему свободно перемещаться вверх/вниз. Теперь на конце этого плеча будем моделировать различных схемы компоновки винтов:
- два винта закреплены на поперечной перекладине, так что сверху все это выглядит как длинная буква "Т". Оси вращения винтов разнесены друг от друга на расстоянии не больше половины диаметра (как у настоящего квадрокоптера)
- два винта в соосной схеме, один винт под другим (один винт направлен вниз, другой вверх).
- один винт закрепленный по центру на конце.
Будем считать все винты с моторами абсолютно одинаковыми.
Мне же кажется, что распределение сил будет примерно таким:
- оба винта дают по 100% тяги, но за счет их близости суммарная тяга обоих будет в районе 190%.
- верхний винт дает 100% тяги, нижний — 50% — итого: 150%
- один винт — 100% тяги
Площадь под поверхностью винтов, как мне кажется, сыграет решающую роль в выигрыше по КПД. Поэтому трикоптер со спаренными винтами будет выдавать 150% * 3 = 450% мощности по сравнению с гексакоптером у которого винты будут расставлены в одной плоскости: 95% * 6 = 570%. Потеря в мощности получается 21%.
А вы как думаете, какой вариант будет тянуть сильнее?
А вы как думаете, какой вариант будет тянуть сильнее, из моего комментария выше?
Ну вы уклоняетесь от ответа) Вот есть один винт — он создает тягу, условно, 100%. Есть два винта рядом в одной плоскости — они создают тягу ну скажем 200%.
По вашему два винта в соосной схеме сколько наберут?
Да, с условными единицами вы хорошо придумали, лучше моих процентов. Но вот вопрос — откуда взялись дополнительных 11 условных единиц силы тяги при расположении винтов в соосной схеме?
Предлагаю снова пофантазировать.
Представим некоторую модель, состоящую из двух винтов (30 см в диаметре), расположенных по соосной схеме, один над другим, но так что расстояние между этими винтами очень большое (ну скажем 1км). Каждый из винтов будет обладать некоторой подъемной силой, скажем 100 условных единиц. Предположим что винты вращаются в одну и туже сторону и с одинаковой скоростью (все винты и двигатели одинаковые). А поскольку расстояние между ними очень большое, то общее тяговое усилие всей системы будет 200 условных единиц (поток от верхнего винта просто не достает до нижнего).
Теперь будем сближать эти винты между собой до полного их слияния. Если пренебречь толщиной винтов (взять ее за 0 см) и толщиной двигателя (взять ее за 0 см), то после полного их сближения, получим один винт (поскольку скорости одинаковые).
А тяговое усилие одного винта мы уже знаем — оно составляет 100 условных единиц тяги.
Получается некий предел, который от 200 единиц тяги на расстоянии в 1км стремится к некоему значению тяги на расстоянии 0. Здесь нужно учесть тот факт что вращают такой сдвоенный винт два мотора, а не один. Силу тяги ВМГ развивает пропорциональную квадрату угловой скорости. Даже если предположить, что угловая скорость возрастает на 20% от двух моторов, то сила тяги возрастает на корень от этого значения. Т.е. сила тяги такого винта составит порядка 110 единиц тяги.
Получается так, что сила тяги будет постепенно падать на протяжении сближения винтов с 200 единиц тяги до 110 при полном сближении. Вы же утверждаете, что сила тяги возрастает при соосной схеме и будет даже больше (211 условных единиц) той что номинально выдает каждый из винтов. Если следовать вашим словам, тогда должна находится некоторая точка на расстоянии от 1км до 0, в которой сила тяги будет максимальной.
Приведу другой пример:
Представим себе систему координат, состоящую из всего одной оси X. На этой оси расположен мячик для пинбола по которому бьют ракеткой со скоростью 30 км/ч. Допустим, что мячу передалась такая же скорость и он теперь движется вдоль оси со скоростью 30 км/ч. Пусть в системе будет небольшое трение, ну скажем о воздух. На расстоянии 10 метров от начальной точке, скорость мяча будет уже, ну скажем, 25 км/ч. Если в точке, на расстоянии 10 метров, ударить по мячу ракеткой в том же направлении и с такой же скоростью 30 км/ч то мячь пролитит на расстояние, ну скажим 50 метров. Если бы мы не ударяли бы по мячу ракеткой второй раз, то мячь бы пролетел тогда только 40 метров.
Получается, можно было потратить энергии только на один удар, и мяч бы пролетел бы на 40 метров или сделать два удара потратив в два раза больше энергии и мяч улетит всего на 10 метров дальше. А теперь представим себя, сидящим на мяче, после первого удара о ракетку. В момент совершения второго удара ракетка будет двигаться относительно мяча со скорость всего 5 км/ч! (скорость ракетки минус скорость мяча).
Аналогичная ситуация возникает и в соосной системе расположения винтов. Воздушный поток, который образуется под верхним винтом уже настолько сильно разогнан, что второй винт лишь немного его ускоряет. Даже если предположить что вращаться второму винту легче, его скорость будет ненамного больше верхнего. Так же второй винт будет забирать воздух по краям, увеличивая тем самым тяговое усилие.
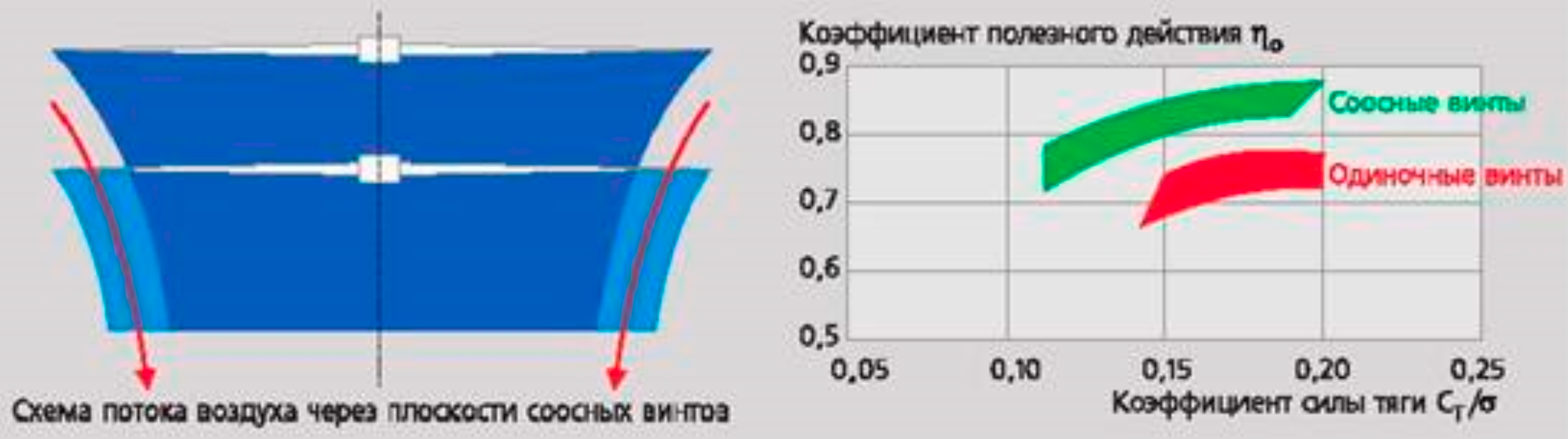
Вот цитата из вашей же статьи:
Результаты летных испытаний и другие экспериментальные материалы свидетельствуют, что коэффициент полезного действия соосных несущих винтов в среднем в 1,06-1,1 раза (на 6-10%) выше, чем одиночных, что видно на рис.1. Учитывая экономию мощности, идущей на компенсацию реактивного момента (10-12%), получаем, что в целом коэффициент полезного действия соосных вертолетов на 16-22% выше, чем одновинтовых.
Вот и получается что:
- в случае одного винта — тяга 100 условных единиц тяги.
- в случае соосной схемы тяга больше на 22% по сравнению с одновинтовой схемой — т.е. 122 условных единицы тяги.
- в случае двух винтов в одной плоскости тяга будет 200 условных единиц тяги.
Получается трикоптер со спаренными винтами будет иметь 366 условных единиц тяги, а гексакоптер с винтами в одной плоскости — 100*6 = 600 условных единиц тяги. Даже если вычесть порядка 10% на пересечение воздушных потоков, останется 540 условных единицы тяги!
Получается потеря в мощности при соосной схеме 78% а не 50% как я писал выше, для каждой пары винтов. А для всего коптера потеря в тяги составит 32% а не 25% как я писал выше.
Наверно поэтому так редко встречаются варианты коптеров с соосной схемой.
С ракеткой и тенисным мячом пример тоже не корректный вы путаете скорость и энергию, вашем пример второй удар по летящему мячу передаст ему меньше энергии и соответственно, затраты энергии будут не совсем не двойными, а если вы ракеткой не догоните мяч, во втором ударе, то затраты энергии на второй удар будут вообще нулевыми.
Когда говорят про рост на 22% 122 условных единицы тяги имеется ввиду один двигатель на два соостных винта. Хотя в этих 22% выигрыша часть за счет отказа от хвостового стабилизатора. Сама по себе соосность дает 10% выигрыша. Поэтому если вы поставите два соостных винта с одним двигателем то получение 111 условных единиц тяги. А с двумя двигателями 222 условных единицы тяги.
Вы же сами пишете в статье:
Силу тяги ВМГ развивает пропорциональную квадрату угловой скорости
Получается если с двумя двигателями сила тяги увеличилась в два раза (с 111 до 222) то угловая скорость винта увеличилась в 4 раза?
Противоречие в том, что путается сила тяги с мощностью. При добавлении второго двигателя мощность возрастет в два раза, а сила тяги — нет.
Если взять автомобиль с двигателем мощностью в 100л/с то он сможет разогнаться до 200км/ч. то по вашему получается если добавить ему еще одни такой же двигатель, он разгонится до 400км/ч. Максимальная скорость увеличится ну максимум до 280км/ч. Мощность увеличилась в два раза, а скорость нет. Скорость увеличивается не линейно!
Силу тяги винта можно считать равной весу, который этот винт может поднять.
Поэтому если вы поставите два соостных винта с одним двигателем то получение 111 условных единиц тяги. А с двумя двигателями 222 условных единицы тяги.
Если взять один винт с мотором, который поднимает 1кг, и добавить к нему еще один мотор подъемная сила не будет 2кг! Чтобы развить такую подъемную силу, винт должен начать вращаться в 4 раза быстрее.
Правильно, для того что бы получить на одном винте такую же силу тяги как на двух при той же двойной подводимой мощности нужно увеличить угловую скорость в 4 раза.
Если скорость вращения винта с одним мотором 30 000 оборотов в минуту то при добавлении второго мотора, по вашему, он должен вращаться со скоростью 120 000 оборот в минуту. Но винт чисто физически не будет вращаться с такой скоростью! Ну максимум скорость вращения увеличится до 45 000 оборотов в минуту. А это значит что при добавлении второго двигателя сила тяги возрастет всего до 1.2кг максимум! (30К об/м ~ 1 кг, 120К об/м ~ 2 кг, 45К об/м ~ 1.2 кг)
Возвращаясь к примеру выше с соосной схемой, когда винты были на расстоянии 1 кг друг над другом, сила тяги была 2 кг (по 1 кг на каждый). Когда мы их начали сближать до полного сближения, сила тяги падает до 1.2 кг. Здесь чисто физически не может быть такого положения винтов, при котором они создают тягу 2,22 кг.
А до момента совпадаения КПД системы постоянно расло за счет уплотнения воздуха в который ввинчиватеся второй винт.
Если бы такое было бы в действительности, если бы тяга из двух соосных винтов с двумя двигателями возрастала была до 2.2 кг вместо по 1 кг для каждого, мир был бы завален квадрокоптерами, построенными по такой схеме. Но 98% всех выпускаемых на рынке квадракоптеров не имеют соосной схемы. Рынок решает, что работает, а что нет. Значит это не работает. А эффект ввинчивания — ну это просто ваша фантазия.
Решает не мир, а экономика. При сосной схеме с двумя винтоами у коптера нужно минимально 6 винтомоторных групп что бы получииь управляемый треугольник сил. Для квадракоптера достаточнр 4-х это в 1.5 раза дешевле. Вот весь хер да копейки.
"Эфект ввинчивания" это не фантазия, а просто физика — чем более плотная среда тем больше тяга винта, при тех же обортах, подьемная сила у вертолета падает с разряжением воздуха, но высоте, тоже самое с винтамам самолетов. Это очевидный и наблюдаемый эфект.
Двухосные вертолеты Камова и сдвоеные пропеллеры винтовых самолетов примеры использования этого эфекта в техника, для првышения КПД за счет двух винтов на одной оси.
Для коптера сделать механику двухосных винтов на одном двигателе слишком дорого стоимость механики превзойдет стоимость коптера.
И кстати вы ошибшись, и я тоже:
Тяга растет не пропорционально квадрату оборотов:
"Величина тяги несущего винта в очень большой степени зависит от его диаметра D и числа оборотов. При увеличении диаметра винта в два раза тяга его увеличится приблизительно в 16 раз, при увеличении числа оборотов вдвое тяга увеличится приблизительно в 4 раза. Кроме того, тяга несущего винта зависит также от плотности воздуха ρ, угла установки лопастей φ (шага несущего винта), геометрических и аэродинамических характеристик данного винта, а также от режима полета. Влияние последних четырех факторов выражается обычно в формулах тяги воздушного винта через коэффициент тяги ат.
Таким образом, тяга несущего винта вертолета будет пропорциональна:
— диаметру винта в четвертой степени ...... D4
— квадрату секундных оборотов несущего винта.. . n2s
— плотности воздуха ............. ρ
— коэффициенту тяги ............. αr
Само собой разумеется, что увеличение диаметра или скорости вращения винта влечет за собой и увеличение потребной мощности. Следовательно, величина тяги в конечном итоге зависит и от мощности двигателя.
Взято отсюда: http://twistairclub.narod.ru/zagordan/glava1-1.htm
Если скорость оборотов увеличит в 1.5 раза, то тяга винта увеличится в 2.25 раз!

В случае коптера подьемная сила это разность давления воздуха над винтом и под винтом.
youtu.be/iQBgl3T94XI
Введение в моделирование динамики квадро-, гекса- и октокоптеров