Добрый день. В далеком 2015-м году я собрал робота-пылесоса, описав его создание в этой статье.
За прошедшее время робот серьезно изменился. Как и обещал, хочу поделиться доработакми.
Итак, что было сделано:
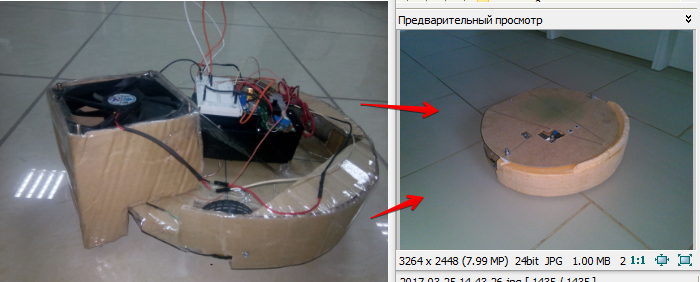
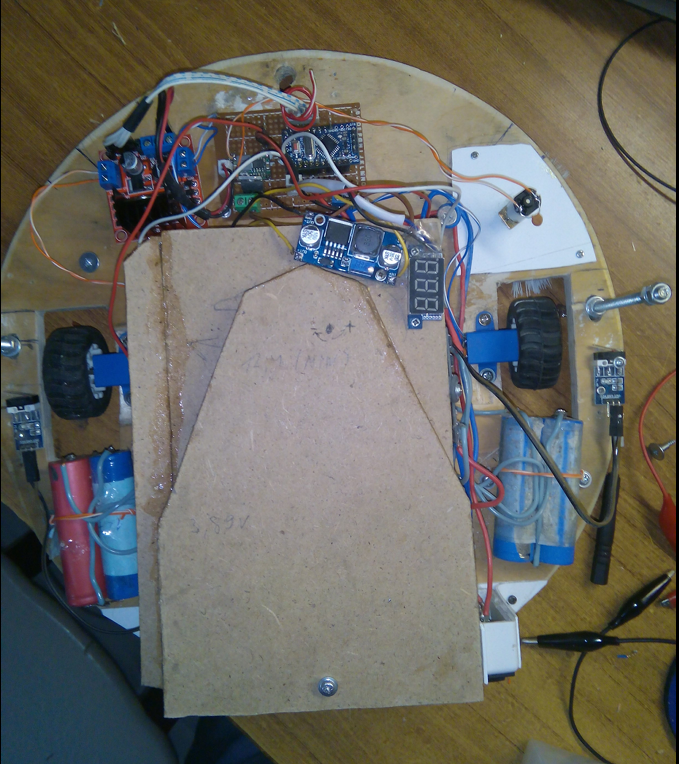
1. Вместо картонного основания теперь круг из фанеры 9мм — это позволило хорошо закреплять все детали робота, используя нормальные шурупы, а не стяжки.
2. Следующим попал под переделку блок пылесоса. Мотор и турбину оставил ту же, но разместил их не «блином», а вынес турбину в переднюю часть корпуса. Такого я у самоделок еще не встречал. Эта хитрость позволила уменьшить высоту пылесоса до 8,5 см и он теперь пролезает даже под некоторые шкафы. Сам же корпус пылесоса собран заново из тонкого ДВП.
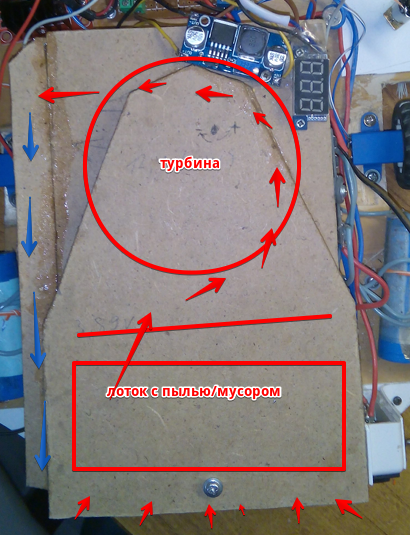
«Отработанный» воздух пришлось выводить за пределы корпуса из-за того, что он даже после фильтра достаточно пыльный, и вся эта пыль выдувалась прямехонько на левый мотор. Также на корпус «временно» повесил плату DC/DC step UP для повышения напряжения питания турбины. Входное напряжение +12V, но этого маловато для уверенного всасывания средней/крупной грязи. При напряжении около +16V тяга уже достаточна. Можно поднять и выше, но тогда и увеличится шумность. Также на корпус пылесоса (опять же «временно») закрепил вольтметр, чтоб примерно определить текущий заряд батарей.
3. Следующими под раздачу попали «желтые» мотор-редукторы. Не подходят они из-за большой шумности. Да и уменьшить скорость хода на этих моторах без потери в крутящем моменте у меня нормально не получилось — робот носился по комнате, пугая кошку )
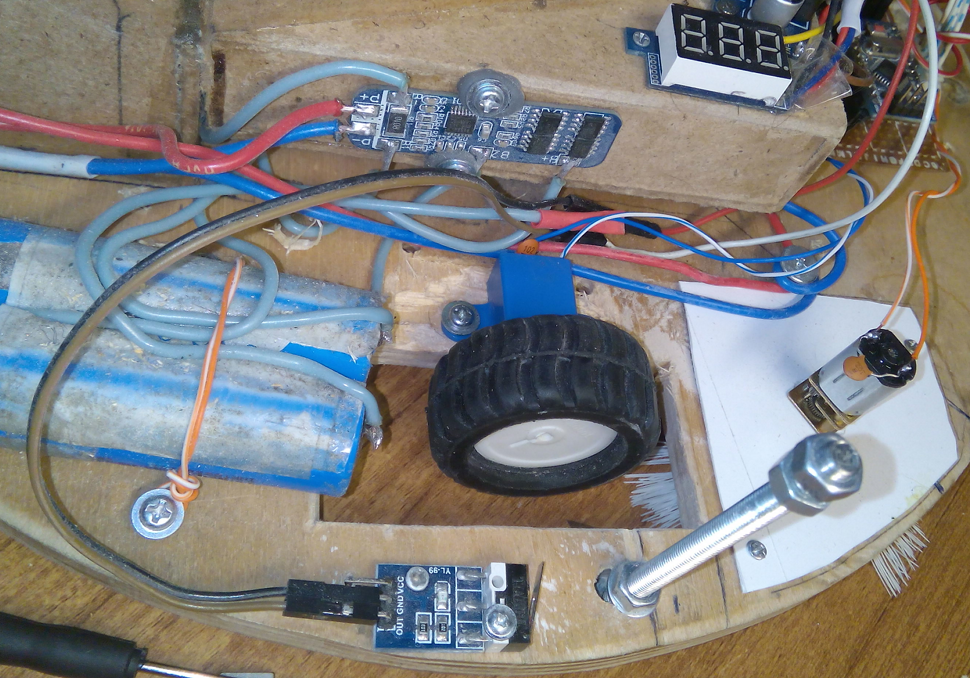
На просторах интернета наткнулся на маленькие моторы N20, решил использовать их.

Но с ними приключились 2 неприятности: продавец почему-то прислал мне оба мотора с разным передаточным числом, а при установке их на платформу, они оказались очень шумными, даже хуже, чем те китайские желтые мотор-редукторы. Вероятно шум можно уменьшить, если сделать некий «демпфер» между мотором к корпусом, но я пока остановился на поиске других моторов, хоть с этими робот и перестал носиться по комнатам как угорелый ) Ну и пока проводил эксперименты, спалил маленький контроллер мотор-редукторов, в итоге поставил-таки L298N.
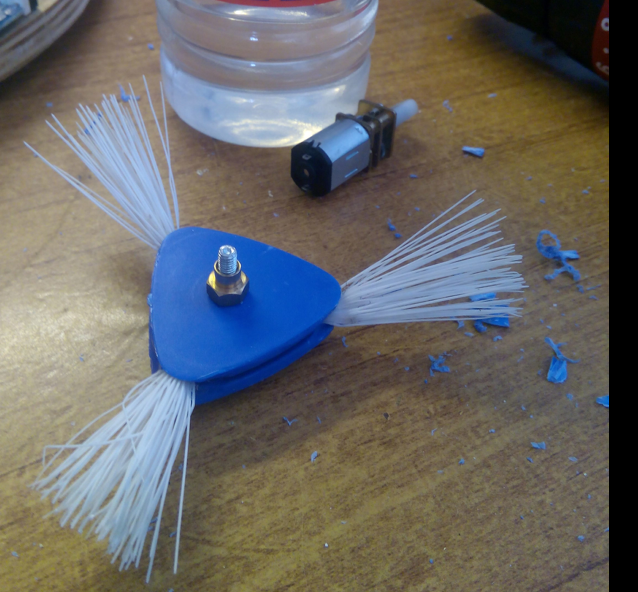
4. В роботе добавился еще один маленький мотор с щеткой. Щетку сделал из подручных средств.

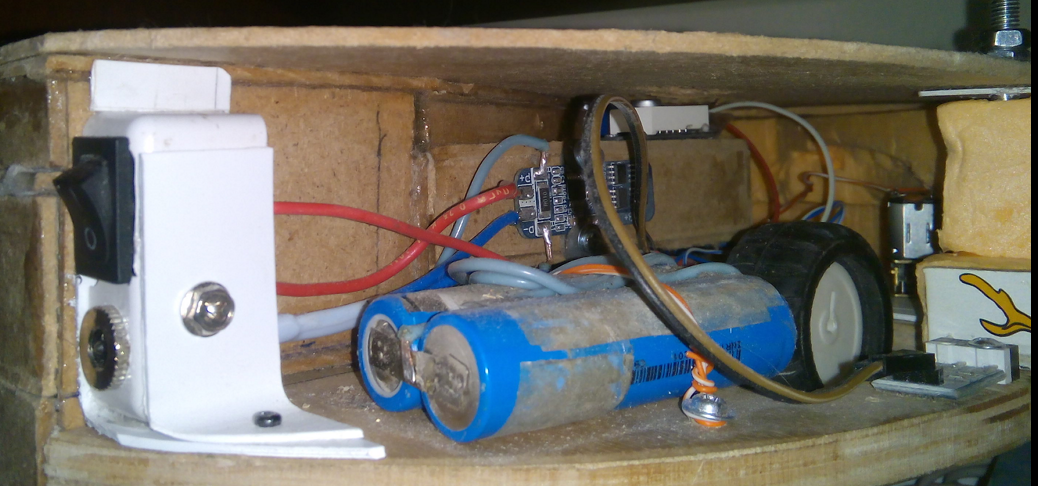
5. Передний бампер. С ним пришлось повозиться, испробовав много разных вариантов. В итоге остановился на пеноплексе

Также в качестве датчиков стенки поставил самые простые концевики. Никаких дополнительных пружинок не понадобилось — кнопочки достаточно упруги, чтоб возвращать бампер обратно после соприкосновения с препятствием.
6. Установлен BMS-контроллер на 3 литиевых банки. Изначально хотел поставить 4, но BMS на 4 банки пришел бракованным, пока, опять же «временно», оставил так

В итоге получился неплохой бюджетный, простой, но очень шумный робот-пылесос.
Если читатели подскажут, какие мотор/редукторы лучше использовать, буду признателен. Нужны нешумные, с питанием 3-12v, примерно 60 оборотов вала в минуту. Спасибо.
За прошедшее время робот серьезно изменился. Как и обещал, хочу поделиться доработакми.
Итак, что было сделано:
1. Вместо картонного основания теперь круг из фанеры 9мм — это позволило хорошо закреплять все детали робота, используя нормальные шурупы, а не стяжки.
2. Следующим попал под переделку блок пылесоса. Мотор и турбину оставил ту же, но разместил их не «блином», а вынес турбину в переднюю часть корпуса. Такого я у самоделок еще не встречал. Эта хитрость позволила уменьшить высоту пылесоса до 8,5 см и он теперь пролезает даже под некоторые шкафы. Сам же корпус пылесоса собран заново из тонкого ДВП.
«Отработанный» воздух пришлось выводить за пределы корпуса из-за того, что он даже после фильтра достаточно пыльный, и вся эта пыль выдувалась прямехонько на левый мотор. Также на корпус «временно» повесил плату DC/DC step UP для повышения напряжения питания турбины. Входное напряжение +12V, но этого маловато для уверенного всасывания средней/крупной грязи. При напряжении около +16V тяга уже достаточна. Можно поднять и выше, но тогда и увеличится шумность. Также на корпус пылесоса (опять же «временно») закрепил вольтметр, чтоб примерно определить текущий заряд батарей.
3. Следующими под раздачу попали «желтые» мотор-редукторы. Не подходят они из-за большой шумности. Да и уменьшить скорость хода на этих моторах без потери в крутящем моменте у меня нормально не получилось — робот носился по комнате, пугая кошку )
На просторах интернета наткнулся на маленькие моторы N20, решил использовать их.
Но с ними приключились 2 неприятности: продавец почему-то прислал мне оба мотора с разным передаточным числом, а при установке их на платформу, они оказались очень шумными, даже хуже, чем те китайские желтые мотор-редукторы. Вероятно шум можно уменьшить, если сделать некий «демпфер» между мотором к корпусом, но я пока остановился на поиске других моторов, хоть с этими робот и перестал носиться по комнатам как угорелый ) Ну и пока проводил эксперименты, спалил маленький контроллер мотор-редукторов, в итоге поставил-таки L298N.
4. В роботе добавился еще один маленький мотор с щеткой. Щетку сделал из подручных средств.
5. Передний бампер. С ним пришлось повозиться, испробовав много разных вариантов. В итоге остановился на пеноплексе
Также в качестве датчиков стенки поставил самые простые концевики. Никаких дополнительных пружинок не понадобилось — кнопочки достаточно упруги, чтоб возвращать бампер обратно после соприкосновения с препятствием.
6. Установлен BMS-контроллер на 3 литиевых банки. Изначально хотел поставить 4, но BMS на 4 банки пришел бракованным, пока, опять же «временно», оставил так
В итоге получился неплохой бюджетный, простой, но очень шумный робот-пылесос.
Если читатели подскажут, какие мотор/редукторы лучше использовать, буду признателен. Нужны нешумные, с питанием 3-12v, примерно 60 оборотов вала в минуту. Спасибо.
