В предыдущей серии я проводил эксперимент с автономным движением своего домашнего танка. Дорога распознавалась с помощью цветового фильтра, а полученная маска шла на вход специально обученной нейросети-классификатору, которая выбирала ехать вправо, влево или прямо.
Слабым местом было распознавание самого дорожного полотна из-за переменчивости цветовых оттенков, из-за чего нейросеть, принимающая решения, выдавала странные результаты. В комментариях к той статье рекомендовали обратить внимание на семантическую сегментацию. Тема оказалась перспективной и применение сегментирующей нейросети принесло свои плюсы, но и минусы, куда же без них.
Но обо всем по порядку и для начала немного матчасти.
Сегментация — процесс выделения некоторых частей на изображении. Простейший и самый очевидный вид сегментации — по цвету. Однако, используя этот метод, невозможно понять, что и где изображено на картинке.
Вот неплохая статья, описывающая примитивные подходы.
Семантическая сегментация — разбиение изображения на объекты с определением типов этих объектов.
Выглядит это как-то так:
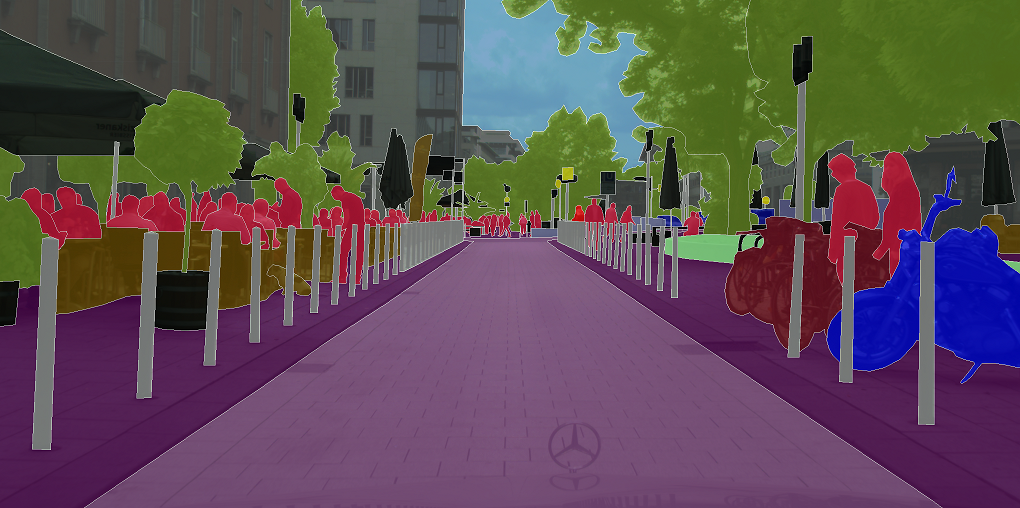
Результаты очень впечатляющие, посмотрим чего стоит воплотить это в реальной жизни.
Самая известная нейросеть, изначально разработанная для медицины.
Первоисточник
Народ быстро сообразил, что подход можно использовать на все случаи жизни.
В интернете много статей, как готовить данные и обучать U-net сети:
Однако, готовой U-net сети, чтобы быстро взять и поэкспериментировать, я не нашел.
Более молодая и менее известная сеть. Разработана как раз для распознавания городских улиц.
Самые популярные датасеты, для сегментации улиц (на них изначально обучали E-net):
На этих же датасетах сейчас обучают и U-net.
Поток новой информации по сегментации был довольно ошеломляющим. Инстинктивно хотелось зацепиться за что-нибудь попроще. Внутреннего дзена разбираться в архитектуре сетей и тратить время на обучение я в себе не почувствовал. Зато в статье от PyImageSearch была уже готовая и обученная нейросеть, причем в формате совместимом с OpenCV-DNN.
Так что выбор был сделан в сторону наименьшего сопротивления.
Использование очень простое:
(Более всего беспокоит то, что сеть обучена на картинках размером 1024x512 — это во-первых больше, чем отдает камера на Raspberry, во-вторых требуемая производительность для обработки такого объема данных несколько смущает. В итоге, главная проблема окажется именно в этом).
Читаем нейросеть из файлов (в одном сама модель, в другом имена классов, в третьем — цвета).
Сегментируем изображение, попутно размечая сегменты поверх оригинального изображения
(В моем случае все классы, кроме дороги, невидимы).
Берем готовые картинки с танка и натравливаем на них сегментирующую нейросеть.

Дорогой признана только левая часть тротуара.
Сжимаем картинку и берем из нее центр размером 64x64:
(Такой размер ожидается нейросетью, которая принимает решение о смене направления)

Нейросеть направления (по факту — классификатор) командует взять влево. Не очень правильно, но терпимо.

Похожая ситуация, опять правый нижний угол потерян (там еще и асфальт мокрый).
Однако большая часть дороги все же распознана.

Классификатор предлагает ехать прямо.
Ситуция, когда робот оказался посреди тротуара.

Дорога распознана практически идеально.

Классификатор командает брать вправо (чтобы найти кромку дороги в следующий раз).
Поколдовав немного над прошивкой танка, заменил цветовой детектор дороги на сегментирующую нейросеть.
При запуске всего этого на Raspberry Pi первое, что вылезло — удручающая производительность.
На сегментацию одного изображения уходит по 6 секунд — за это время танк бодрой рысцой успевает проскочить все повороты.
В реальных испытаниях так и получилось — несмотря на практически идеальное распознавание тротуара и правильные команды с управляющей нейросети — за время время обработки изображения танк успевал уйти в сторону.

В общем, на Raspberry картинки такого размера не переварить.
Похоже, все таки придется заняться обучением специализированной нейросети.
Слабым местом было распознавание самого дорожного полотна из-за переменчивости цветовых оттенков, из-за чего нейросеть, принимающая решения, выдавала странные результаты. В комментариях к той статье рекомендовали обратить внимание на семантическую сегментацию. Тема оказалась перспективной и применение сегментирующей нейросети принесло свои плюсы, но и минусы, куда же без них.
Но обо всем по порядку и для начала немного матчасти.
Сегментация
Сегментация — процесс выделения некоторых частей на изображении. Простейший и самый очевидный вид сегментации — по цвету. Однако, используя этот метод, невозможно понять, что и где изображено на картинке.
Вот неплохая статья, описывающая примитивные подходы.
Семантическая сегментация
Семантическая сегментация — разбиение изображения на объекты с определением типов этих объектов.
Выглядит это как-то так:
Результаты очень впечатляющие, посмотрим чего стоит воплотить это в реальной жизни.
U-net
Самая известная нейросеть, изначально разработанная для медицины.
Первоисточник
Народ быстро сообразил, что подход можно использовать на все случаи жизни.
В интернете много статей, как готовить данные и обучать U-net сети:
Однако, готовой U-net сети, чтобы быстро взять и поэкспериментировать, я не нашел.
E-net
Более молодая и менее известная сеть. Разработана как раз для распознавания городских улиц.
Данные
Самые популярные датасеты, для сегментации улиц (на них изначально обучали E-net):
- CityScapes — Немецкие и швейцарские города
- CamVid — улицы Кембриджа в Англии
- SUN — Принстонский набор датасетов для разных видов сцен
На этих же датасетах сейчас обучают и U-net.
Выбор реализации
Поток новой информации по сегментации был довольно ошеломляющим. Инстинктивно хотелось зацепиться за что-нибудь попроще. Внутреннего дзена разбираться в архитектуре сетей и тратить время на обучение я в себе не почувствовал. Зато в статье от PyImageSearch была уже готовая и обученная нейросеть, причем в формате совместимом с OpenCV-DNN.
Так что выбор был сделан в сторону наименьшего сопротивления.
Использование очень простое:
(Более всего беспокоит то, что сеть обучена на картинках размером 1024x512 — это во-первых больше, чем отдает камера на Raspberry, во-вторых требуемая производительность для обработки такого объема данных несколько смущает. В итоге, главная проблема окажется именно в этом).
Читаем нейросеть из файлов (в одном сама модель, в другом имена классов, в третьем — цвета).
def load_segment_model(): try: classes = None with open(PiConf.SEGMENT_CLASSES) as f: classes = f.read().strip().split("\n") colors = None with open(PiConf.SEGMENT_COLORS) as f: colors= f.read().strip().split("\n") colors = [np.array(c.split(",")).astype("int") for c in colors] colors = np.array(colors, dtype="uint8") print("[INFO] loading model...") net = cv2.dnn.readNet(PiConf.SEGMENT_MODEL) return net, classes, colors except Exception as e: logging.exception("Cannot load segment model") return None, None, None
Сегментируем изображение, попутно размечая сегменты поверх оригинального изображения
(В моем случае все классы, кроме дороги, невидимы).
def segment_image(image_path, seg_net, seg_classes, seg_colors): image0 = cv2.imread(image_path) image = cv2.resize(image0, (1024, 512),interpolation=cv2.INTER_NEAREST) blob = cv2.dnn.blobFromImage(image, 1 / 255.0, (1024, 512), 0, swapRB=True, crop=False) seg_net.setInput(blob) start = time.time() output = seg_net.forward() end = time.time() print("[INFO] inference took {:.4f} seconds".format(end - start)) (numClasses, height, width) = output.shape[1:4] classMap = np.argmax(output[0], axis=0) mask = seg_colors[classMap] mask = cv2.resize(mask, (image0.shape[1], image0.shape[0]),interpolation=cv2.INTER_NEAREST) classMap = cv2.resize(classMap, (image0.shape[1], image0.shape[0]), interpolation=cv2.INTER_NEAREST) gmask = cv2.cvtColor(mask, cv2.COLOR_BGR2GRAY) gmask = cv2.resize(gmask, (128, 64), interpolation=cv2.INTER_NEAREST) gmask = gmask[0:64,32:96] output = ((0.6 * image0) + (0.4 * mask)).astype("uint8") return output, gmask
Проверка
Берем готовые картинки с танка и натравливаем на них сегментирующую нейросеть.
1
Дорогой признана только левая часть тротуара.
Сжимаем картинку и берем из нее центр размером 64x64:
(Такой размер ожидается нейросетью, которая принимает решение о смене направления)
Нейросеть направления (по факту — классификатор) командует взять влево. Не очень правильно, но терпимо.
2
Похожая ситуация, опять правый нижний угол потерян (там еще и асфальт мокрый).
Однако большая часть дороги все же распознана.
Классификатор предлагает ехать прямо.
3
Ситуция, когда робот оказался посреди тротуара.
Дорога распознана практически идеально.
Классификатор командает брать вправо (чтобы найти кромку дороги в следующий раз).
Применение
Поколдовав немного над прошивкой танка, заменил цветовой детектор дороги на сегментирующую нейросеть.
При запуске всего этого на Raspberry Pi первое, что вылезло — удручающая производительность.
На сегментацию одного изображения уходит по 6 секунд — за это время танк бодрой рысцой успевает проскочить все повороты.
В реальных испытаниях так и получилось — несмотря на практически идеальное распознавание тротуара и правильные команды с управляющей нейросети — за время время обработки изображения танк успевал уйти в сторону.
В общем, на Raspberry картинки такого размера не переварить.
Похоже, все таки придется заняться обучением специализированной нейросети.
