
Введение
Беспоисковый метод — простой, надёжный и универсальный метод расчёта настроек субоптимальных регуляторов, включая и такие алгоритмы как ПД, ПДД и ПИДД [1].
Однако, приведенная в [1] программная реализация данного метода имеет ряд недостатков, что затрудняет его применение в микропроцессорных регулирующих приборах.
Среди недостатков можно выделить такие:
Неоднозначность в определении диапазона рабочих частот, которая, даже при наличии сглаживающего звена в структуре передаточной функции регулятора, может привести к отрицательным значениям настроек;
В работе [1] для реализации беспоискового метода расчёта регуляторов рассматривается передаточная функция объекта вида:
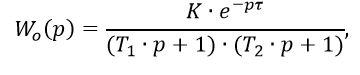
что при второй степени оператора p в знаменателе ограничивает точность динамической идентификации объекта управления [2].
Постановка задачи:
1. Средствами высокоуровневого языка программирования Python определять по КЧХ субоптимального регулятора максимальное и минимальное значение частот так, чтобы, при максимуме частоты, мнимая и действительная часть передаточной функции были положительными;
2. Средствами библиотеки scipy. optimize высокоуровневого языка программирования Python найти по передаточной функции субоптимального регулятора настройки регулятора, а средствами библиотеки scipy. integrate получить переходные характеристики замкнутой системы регулирования;
3. Для более точной идентификации объекта, использовать в расчётах передаточную функцию, имеющую третью степень оператора p в знаменателе;

4. Сравнить переходные характеристики замкнутой системы, полученные поисковым [3] и беспоисковым методами;
5. Построить с использованием беспоискового метода переходную характеристику для ПИДД алгоритма, сравнить её по интегральному квадратичному критерию качества регулирования с ПИД алгоритмом.












 Здравствуй, читатель! Пару лет назад в
Здравствуй, читатель! Пару лет назад в {kind=link}