
Spectrum-48 против пачки сигарет, каша из топора или что может STM32F103C8T6+video(update)
3 min
Tutorial
Recovery Mode
Все началось с очередной попытки бросить курить. Разбудив свою внутреннюю «жабу» в поисках поддержки, говорю ей: «Смотри, пачка моих сигарет стоит сегодня как карманный ретро-компьютер с экраном, то есть примерно $10, а когда-то давным давно, на клон синклера-48К мы всю месячную зарплату и больше месяца на сборку и отладку потратили». Она: «Вы мужики- козлы и вруны, докажи!». Пришлось поработать.
Итак, исходно-расходные материалы:
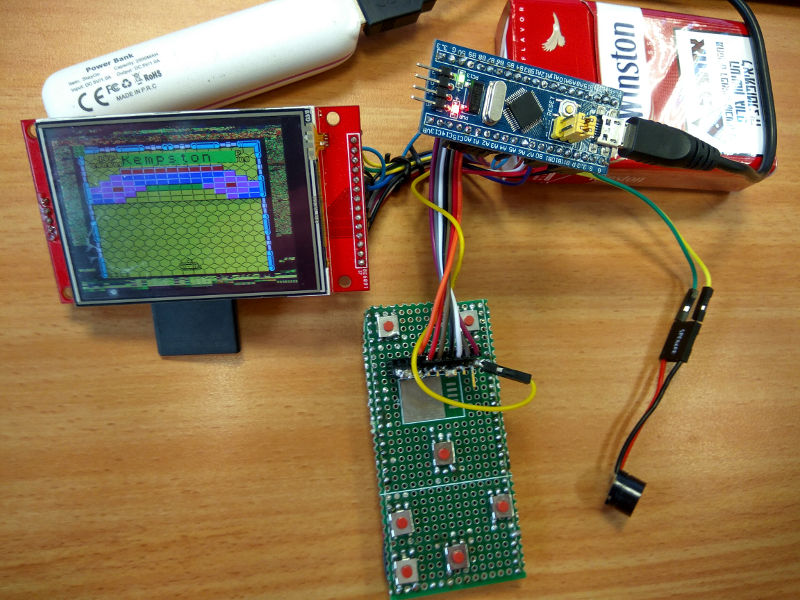
Итак, исходно-расходные материалы:
- «Blue pill»: STM32F103C8T6 — 20K ram 64K flash $2.06
- «Ардуино Display»: ILI9341 2.8" 320x240 с сенсорным экраном и слотом карточки $7.72
- Пищалка $0.18
- Немного кнопок (7 штук) $0.2
- Немного проводов $0.1
- Флеш карта на 64 мега (с древнего фотоаппарата), в расчет не включена
- Программатор ST-LINK, не расходуется и в расчет не включен, однако тоже пару долларов стоит
- Пачка сигарет — расходуется слишком быстро и каждый день -$8.37

 Когда в январе сего года я писал материал о файловой системе LittleFS (интегрированной в состав arm mbed os), то обещал в скорейшем времени описать создание проекта с arm mbed os для произвольного микроконтроллера STM32. Как известно, онлайн IDE от ARM (а точнее, выделенного подразделения Arm mbed) поддерживает, во-первых, строго определенное число отладочных плат, и число их невелико; во-вторых, экспортирует онлайн-примеры, на базе которых можно строить какие-то свои проекты, только для наиболее известных IDE: ARM, uVision KEIL и IAR. Более того, некоторые примеры не экспортируются вовсе. То есть, доступны для экспорта или только варианты для IAR, или только для KEIL, и так далее. Так что, как в то время показалось, научиться “прикручивать” arm mbed os к любому МК было бы не лишним вовсе.
Когда в январе сего года я писал материал о файловой системе LittleFS (интегрированной в состав arm mbed os), то обещал в скорейшем времени описать создание проекта с arm mbed os для произвольного микроконтроллера STM32. Как известно, онлайн IDE от ARM (а точнее, выделенного подразделения Arm mbed) поддерживает, во-первых, строго определенное число отладочных плат, и число их невелико; во-вторых, экспортирует онлайн-примеры, на базе которых можно строить какие-то свои проекты, только для наиболее известных IDE: ARM, uVision KEIL и IAR. Более того, некоторые примеры не экспортируются вовсе. То есть, доступны для экспорта или только варианты для IAR, или только для KEIL, и так далее. Так что, как в то время показалось, научиться “прикручивать” arm mbed os к любому МК было бы не лишним вовсе.





 Смотришь новости: ну жизни нет без чат-ботов!
Смотришь новости: ну жизни нет без чат-ботов! 