
Расположение автомобилей на старте эксперимента A

Расположение автомобилей через 93 секунды после старта эксперимента A, когда возникла первая волна с остановкой (справа вверху)

Расположение автомобилей через 327 секунд после старта эксперимента A, где один беспилотный автомобиль эффективно смягчает скопления
В 2008 году японский исследователь Юки Сугияма (Yuki Sugiyama) с соавторами получил экспериментальные свидетельства конкретного физического механизма, который приводит к образованию автомобильной пробки. Когда плотность автомобилей выше критического значения, то переход в состояние пробки — это натуральный фазовый переход, как кристаллизация воды при температуре −0 °C, и учёные получили экспериментальные доказательство этого тезиса. Таким образом, образование пробок на заданной плотности потока — естественное свойство человеческого вождения.
Японские учёные представили автомобильный трафик в виде физической системы многих частиц, которая порождает нестабильность состояния свободного потока из-за усиления их колебаний. Таким образом, переход в состояние пробки происходит спонтанно и неизбежно, если средняя плотность автомобилей превышает определённое значение. Другими словами, конкретное узкое место на дороге — это всего лишь триггер, но не причина возникновения пробки. Если бы не это узкое место, то другое бутылочное горлышко стало бы триггером. Более того, учёные доказали, что пробка в полосе неизбежно возникнет в отсутствие бутылочного горлышка и перестраивания автомобилей — это показал эксперимент с кольцевым движением.

Зависимость между плотностью автомобилей (под управлением водителей-людей) и пропускной способностью дороги. Критическим является плотность около 25 автомобилей на 1 км полосы. Данные собраны по результатам месяца наблюдений на одной точке шоссе в Японии
Под впечатлением от работы коллег группа американских физиков и математиков из Университета Рутгерса, Университета Темпл, Университета Аризоны и Иллинойсского университета в Урбане-Шампейне сейчас решили проверить, как изменятся свойства этой физической системы (автомобильного трафика из водителей-людей) при добавлении в неё одного беспилотного автомобиля.
Как и в оригинальном эксперименте Сугиямы, здесь 22 автомобиля равномерно распределили по кольцевому треку, а их скорость отслеживали панорамной 360° камерой. Водителям поручили двигаться с соблюдением изначальной дистанции за впереди идущим автомобилем. Каждый автомобиль дополнительно оснастили сканером OBD-II, чтобы записывать в реальном времени потребление топлива и, следовательно, выброс выхлопных газов. По итогу можно будет подсчитать, какую выгоду в топливном выражении и для окружающей среды несёт использование даже небольшого количества беспилотных автомобилей.
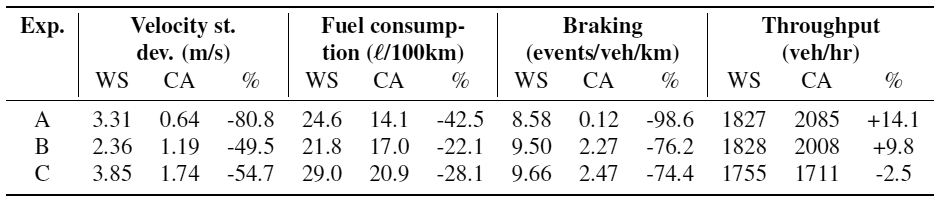
Всего было проведено три эксперимента: A, B и C, а также испытаны две стратегии движения беспилотного автомобиля. В первом случае он двигался с фиксированной средней скоростью (выбранной на основании наблюдения и вводимой извне), настолько близко к ней, чтобы избежать столкновения, под управлением автоматической системы. В эксперименте B ту же стратегию пытался реализовать опытный водитель. В эксперименте C было реализовано движением под управлением распространённого контроллера proportional-integral (PI), которому известна только история скорости одного этого автомобиля за период времени. В этом случае автомобиль притормаживал при приближении к впереди идущему автомобилю (чтобы избежать столкновения) и ускорялся при увеличении дистанции от впереди идущего автомобиля (чтобы не замедлять трафик).
Во всех трёх экспериментах скопления автомобилей (пробки) возникали динамически, если все автомобили находились под управлением людей-водителей. Как только 1 из 22 автомобилей переходил под управление по описанным выше алгоритмам — скопления рассеивались.
При движении без пробок у всех автомобилей расход топлива снизился, в среднем, на 40%, а пропускная способность полосы увеличилась до 14,1%. Количество действий торможения в некоторых случаях снижалось на 98,6%. Более подробно результаты экспериментов A, B и C см. в таблице. Значение WS (wave starts) соответствует характеристикам автомобилей после возникновения первого скопления, когда все автомобили находятся под управлением людей. Значение CA — это характеристики после активации одного беспилотного автомобиля (control active).
«Правильное проектирование беспилотных автомобилей требует ясного понимания реакций на них людей, — объясняет Бенджамин Сейболд (Benjamin Seibold), один из авторов научной работы. — И проведение полевых экспериментов играет важнейшую роль в понимании взаимодействия людей и роботизированных агентов».
Это пример научного исследования на стыке теории транспортных потоков, теории управления, робототехники, кибер-физических систем и транспортного машиностроения. Статья опубликована 4 мая 2017 года на сайте arXiv.org (arXiv:1705.01693).

