
Хабр Курсы для всех
РЕКЛАМА
Практикум, Хекслет, SkyPro, авторские курсы — собрали всех и попросили скидки. Осталось выбрать!
Алгоритм работает на неориентированном графе единой стоимости.Неверно: у графа не бывает ни направлений, ни, тем более, диагоналей. Данный алгоритм работает на лабиринтах.
Всё то, что описывает статья может быть описано как граф
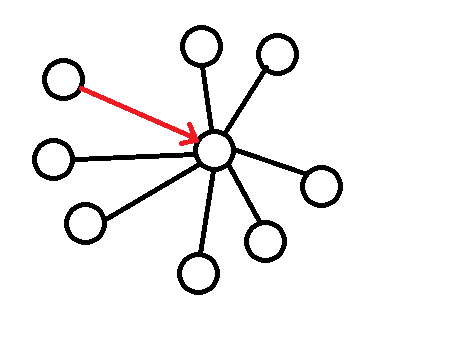




Алгоритм работает на неориентированном графе единой стоимости. Каждое поле карты имеет <= 8 соседей, которые могут быть проходимы или же нет.
Pathfinding is the problem of navigating from one place to another. My research in this area is primarily focused on single-agent pathfinding problems where the world is represented as a static 2-dimensional grid.
Алгоритм поиска пути Jump Point Search