
Хабр Курсы для всех
РЕКЛАМА
Практикум, Хекслет, SkyPro, авторские курсы — собрали всех и попросили скидки. Осталось выбрать!
Трепещите, кожаные мешки! Восстание машин все ближе и ближе! [гомерический смех] Ха-ха-ха!
Там, помнится, даже роботы были очень похожи на этиу вот "собаку".
Если люди станут настолько тупы, как показано в той серии, то человечество действительно будет обречено.
Жуть… На видео со спотмини на фоне проходил человек, спокойный такой…
Карта в нижнем углу напомнила игру диабло (вроде вторую часть)
Правду говорят, что в ПО этих роботов не используются нейросети, или врут?
https://geektimes.com/post/295513/#comment_10447117 red75prim 17.11.17
На NIPS-2016 они говорили, что машинное обучение не используют: http://blog.ought.com/nips-2016-875bb8fadb8c в конце статьи:
«Boston Dynamics doesn’t use any learning in their robots (so far), including the new Spot Mini demoed at NIPS—it’s all manually programmed.»
https://geektimes.com/company/smileexpo/blog/299727/ Anna-Angelova, 6 апреля 2018 "Вспоминаем легенду: как устроен BigDog от Boston Dynamics" (= https://www.cs.swarthmore.edu/~meeden/DevelopmentalRobotics/bigdog.pdf BigDog, the Rough-Terrain Quaduped Robot) — Схема контроля ходьбы BigDog (Figure 5: Control Diagram)
https://geektimes.com/company/smileexpo/blog/299957/ Как Boston Dynamics сделала BigDog автономным (= https://pdfs.semanticscholar.org/79f4/9167f0781037de701d6d5c4d94fab31ca2ac.pdf Autonomous Navigation for BigDog)
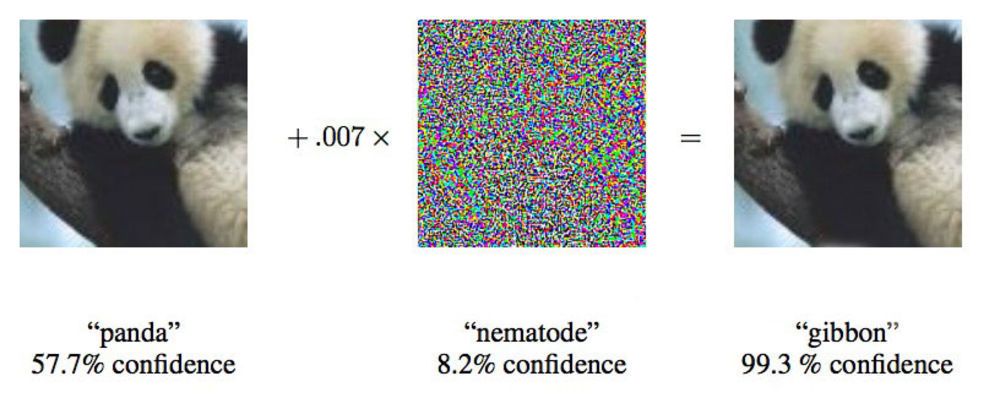
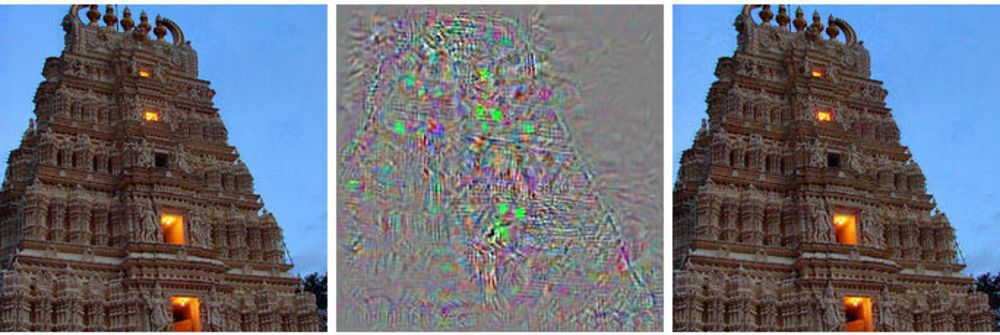
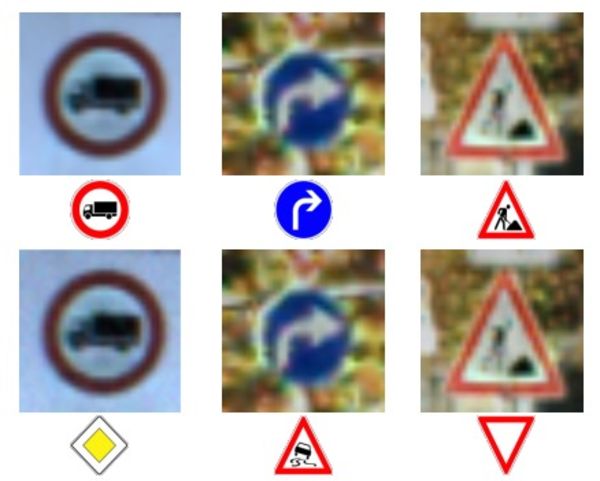
Мне кажется, кипеж вокруг того, что нейросети ненадёжны потому что они умом не понимаемые и полностью не верифицируемые, не особо имеет под собой основания.
Мне кажется, кипеж вокруг того, что нейросети ненадёжны потому что они умом не понимаемые и полностью не верифицируемые, не особо имеет под собой основания.
Главная проблема нейронных сетей даже не в неверифицируемости, а в том, что:
прогресс последних лет привёл к тому, что стало возможным решать те задачи, которые ранее решения попросту не имели.
Еще раз — это объясняется исключительно тем, что появилась возможность скормить нейросети гигантские (по сравнению с возможным до этого) объемы данных, не более, сами же нейросети остались такими же, как и 50 лет назад. Переместите условного ученого, занимающегося нейросетями, из 70-х в 2018 и он вам своими методами 50-летней давности распознает на картинке собачку. Потому что то, что распознает собачку сегодня — это те же методы и есть.
Далее уже, с-но, все зависит от того, что считать прогрессом. С той точки зрения, что мы получаем какой-то работающий полезный продукт, которого до этого не было — прогресс безусловно есть. С точки зрения же научной, в плане исследования свойств нейронных сетей, их поведения, и т.п. вещей — воз и ныне там, то, что происходит сейчас в данной области — чистый и незамутненный метод научного тыка, со всеми вытекающими.
Не потому, что мощи не хватало, а потому, что результат стабильно оказывался неудовлетворительным.
Именно потому, что не было мощностей и больших выборок, результат и оказывался неудовлетворительным. Ничего нового в глубинном обучении нет — многослойные сети разных топологий были и до этого. Просто они сходятся очень-очень медленно и при этом наудачу (то есть может сеть сойтись… а может и не сойтись, никаких теорем о сходимости, как для однослойного персептрона там нет). То есть надо не просто обучать многослойную нейронку (что само по себе долго), надо обучать эту нейронку много раз, пока не повезет. 30 лет назад такой возможности не было, когда она появилась — многослойные сети переоткрыли.
Будем честными, практически для всего в наших инфотехнологиях путеводной звездой является метод научного тыка.
Ну, это да :)
Слоник от сколкова.


когда на квадроцикл посадят, да в условиях зимы прокатятугу, и Путину козырнет.
на защите «ног» SpotMini видны повреждения, вероятно, связанные со столкновениями в процессе обучения.Об человеческую подошву?
Число сочленений — 17
У него 4 ноги, на каждой видимо 4 сочленения. Откуда еще одно?
Впечатление буд-то прыгает за счет реактивной тяги, а не толчка
Ещё один интересный момент в том, что спуск с лестницы SpotMini преодолевает задом-наперёд.
— Венгерская хвосторога в двенадцать раз крупнее человека! Изрыгает огонь так быстро и метко, что может расплавить летящий снитч!
[...]
Горный тролль опаснее хвостороги! Он прокусывает железо! Его шкуру не берут ни оглушающие чары, ни режущие! У него столь острый нюх, что тролль издалека чует — стая перед ним или одинокая уязвимая жертва!
[...]
Если, когда вырастете, у вас не получится применить Смертельное заклинание, то просто аппарируйте! Так же делайте и при встрече со второй по опасности машиной для убийства в мире — дементором.
[...]
Только один монстр может стать для вас угрозой, когда вы вырастете. Самое опасное существо в мире, с которым никто не может сравниться. Это Тёмный волшебник. Вот кого вам действительно нужно бояться.


{kind=link}
{kind=link}
{kind=link}
Обновления от Boston Dynamics