
Еще в начале 2018 года вышла статья Deep Reinforcement Learning Doesn't Work Yet ("Обучение с подкреплением пока не работает"). Основная претензия которой сводилась к тому, что современные алгоритмы обучения с подкреплением требуют для решения задачи примерно столько же времени, как и обычный случайный поиск.
Изменилось ли что-то с того времени? Нет.
Обучение с подкреплением считается одним из трех основных путей к созданию сильного ИИ. Но трудности, с которыми сталкивается эта область машинного обучения, и методы, которыми ученые пытаются бороться с этими трудностями, наводят на мысль что, возможно, с самим этим подходом имеются фундаментальные проблемы.
Постойте, что значит один из трех? А остальные два какие?
С учетом успеха нейронных сетей в последние годы и анализом того, как они работают с высокоуровневыми когнитивными способностями, считавшимися ранее характерными только для человека и высших животных, на сегодняшний день в научном сообществе сложилось мнение, что можно выделить три основных подхода к созданию сильного ИИ на основе нейронных сетей, которые можно считать более менее реалистичными:
1. Обработка текстов
В мире накоплено огромное количество книг и текста в интернете, в том числе учебников и справочников. Текст удобен и быстр для обработки на компьютере. Теоретически, этого массива текстов должно хватить для обучения сильного разговорного ИИ.
При этом подразумевается, что в этих текстовых массивах отражено полное устройство мира (как минимум, оно описано в учебниках и справочниках). Но это совершенно не факт. Тексты как вид представления информации сильно оторваны от реального трехмерного мира и течения времени, в котором мы живем.
Хорошими примерами ИИ, обученными на текстовых массивах, являются чат-боты и автоматические переводчики. Так как для перевода текста нужно понять смысл фразы и пересказать его новыми словами (на другом языке). Существует распространенное заблуждение, что правила грамматики и синтаксиса, включая описание всех возможных исключений, полностью описывают конкретный язык. Это не так. Язык — это лишь вспомогательный инструмент в жизни, он легко меняется и адаптируется под новые ситуации.
Проблема обработки текста (хоть экспертными системами, хоть нейронными сетями) в том, что не существует набора правил, какие фразы в каких ситуациях нужно применять. Обратите внимание — не правил построения самих фраз (чем занимается грамматика и синтаксис), а именно какие фразы в каких жизненных ситуациях. В одной и той же ситуации люди произносят на разных языках фразы, которые вообще никак друг с другом не связаны с точки зрения структуры языка. Сравните фразы при крайней степени удивления: "о, боже!" и "o, holy shit!". Ну и как между ними провести соответствие, зная языковую модель? Да никак. Так случайно сложилось исторически. Нужно знать ситуацию и что в ней обычно говорят на конкретном языке. Именно из-за этого автоматические переводчики пока такие несовершенные.
Можно ли выделить эти знания чисто из массива текстов — неизвестно. Но если автоматические переводчики станут идеально переводить, не делая глупых и нелепых ошибок, то это будет доказательством, что создание сильного ИИ только на основе текста возможно.
2. Распознавание изображений
Посмотрите на это изображение

Глядя на эту фотографию мы понимаем, что съемка велась ночью. Судя по флагам, ветер дует справа налево. А судя по правостороннему движению, дело не происходит в Англии или Австралии. Никакая эта информация не указана явно в пикселях картинки, это внешние знания. На фото есть лишь признаки, по которым мы можем воспользоваться знаниями, полученными из других источников.
О том и речь… И найдите себе девушку, наконец
Поэтому считается, что если обучить нейронную сеть распознавать объекты на картинке, то у нее сложится внутреннее представление о том, как устроен реальный мир. И это представление, полученное по фотографиям, уж точно будет соответствовать нашему реальному и настоящему миру. В отличие от массивов текстов, где это не гарантировано.
Ценность нейронных сетей, обученных на массиве фотографий ImageNet (а теперь и OpenImages V4, COCO, KITTI, BDD100K и другие) вовсе не в факте распознавания котика на фото. А в том, что хранится в предпоследнем слое. Именно там находится набор высокоуровневых features, описывающих наш мир. Вектора в 1024 числа достаточно, чтобы из него получить описание 1000 разных категорий объектов с 80% точностью (и в 95% случаев правильный ответ будет в 5 ближайших вариантах). Только вдумайтесь в это.
Именно поэтому эти features из предпоследнего слоя так успешно используются в совершенно различных задачах по компьютерному зрению. Через Transfer Learning и Fine Tuning. Из этого вектора в 1024 числа можно получить, например, карту глубины по картинке

(пример из работы, где используется практически не измененная предобученная сеть Densenet-169)
Или определять позу человека. Применений много.

Как следствие, распознавание изображений потенциально можно использовать для создания сильного ИИ, так как оно действительно отражает модель нашего реального мира. От фотографии к видео один шаг, а видео — это и есть наша жизнь, так как около 99% информации мы получаем зрительно.
Но по фотографии совершенно непонятно, как мотивировать нейронную сеть думать и делать выводы. Ее можно обучить отвечать на вопросы вроде "сколько карандашей лежит на столе?" (этот класс задач называется Visual Question Answering, пример такого датасета: https://visualqa.org). Или давать текстовое описание тому, что происходит на фото. Это класс задач Image Captioning.

Но является ли это интеллектом? Развив этот подход, в недалеком будущем нейронные сети смогут отвечать по видео на вопросы вроде "На проводах сидело два воробья, один из них улетел, сколько осталось воробьев?". Это уже настоящая математика, в чуть более усложненных случаях недоступная животным и находящаяся на уровне человеческого школьного образования. Особенно, если кроме воробьев, там рядом будут сидеть синички, но их не нужно учитывать, так как вопрос был только про воробьев. Да, это определенно будет интеллект.
3. Обучение с подкреплением (Reinforcement Learning)
Идея очень проста: поощрять действия, ведущие к награде, и избегать ведущих к неудаче. Это универсальный способ обучения и, очевидно, он со всей определенностью может привести к созданию сильного ИИ. Поэтому к Reinforcement Learning такой большой интерес в последние годы.
Конечно, лучше всего сильный ИИ создавать комбинируя все три подхода. На картинках и с обучением с подкреплением можно получить ИИ уровня животных. А добавив к картинкам текстовые названия объектов (шутка, конечно же — заставив ИИ просматривать видео, где люди взаимодействуют и разговаривают, как при обучении младенца), и дообучив на текстовом массиве для получения знаний (аналог нашей школы и университета), в теории можно получить ИИ человеческого уровня. Способный разговаривать.
У обучения с подкреплением есть один большой плюс. В симуляторе можно создать упрощенную модель мира. Так, для фигурки человека достаточно всего 17 степеней свободы, вместо 700 в живом человеке (примерное число мышц). Поэтому в симуляторе можно решать задачу в очень маленькой размерности.
Забегая вперед, современные алгоритмы Reinforcement Learning не способны произвольно управлять моделью человека даже с 17 степенями свободы. То есть не могут решить задачу оптимизации, где на входе 44 числа и на выходе 17. Удается это сделать только в очень простых случаях, с тонкой ручной настройкой начальных условий и гиперпараметров. И даже в этом случае, например чтобы научить модель гуманоида с 17 степенями свободы бегать, причем начиная с положения стоя (что намного проще), нужно несколько суток расчетов на мощном GPU. А чуть более сложные случаи, например научиться вставать из произвольной позы, может вообще никогда не обучиться. Это провал.
Кроме того, все Reinforcement Learning алгоритмы работают с удручающе маленькими нейронными сетями, а с обучением больших не справляются. Крупные сверточные сети используются только чтобы снизить размерность картинки до нескольких features, которые и подаются на вход алгоритмам обучения с подкреплением. Тот же бегающий гуманоид управляется Feed Forward сетью с двумя-тремя слоями по 128 нейронов. Серьезно? И на основе этого мы пытаемся построить сильный ИИ?
Чтобы попытаться понять, почему так происходит и что не так с обучением с подкреплением, надо сначала ознакомиться с основными архитектурами в современном Reinforcement Learning.
Физическое устройство мозга и нервной системы настроено эволюцией под конкретный вид животного и его условия обитания. Так, у мухи в процессе эволюции развилась такая нервная система и такая работа нейромедиаторов в ганглиях (аналог мозга у насекомых), чтобы быстро уворачиваться от мухобойки. Ну хорошо, не от мухобойки, а от птиц, которые их ловили 400 миллионов лет (шутка, птицы сами появились 150 млн лет назад, скорее от лягушек 360 млн лет). А носорогу достаточно такой нервной системы и мозга, чтобы медленно повернуться в сторону цели и начать бежать. А там, как говорится, у носорога плохое зрение, но это уже не его проблемы.
Но помимо эволюции, у каждой конкретной особи, начиная с рождения и в течении всей жизни, работает именно обычный механизм обучения с подкреплением. В случае млекопитающих, да и насекомых тоже, эту работу выполняет дофаминовая система. Ее работа полна тайн и нюансов, но все сводится к тому, что в случае получения награды, дофаминовая система, через механизмы памяти, как-то закрепляет связи между нейронами, которые были активны непосредственно до этого. Так формируется ассоциативная память.
Которая, в силу своей ассоциативности, потом используется при принятии решений. Проще говоря, если текущая ситуация (текущие активные нейроны в этой ситуации) по ассоциативной памяти активируют нейроны памяти об удовольствии, то особь выбирает действия, которые она делала в похожей ситуации и которые запомнила. "Выбирает действия" — это плохое определение. Выбора нет. Просто активированные нейроны памяти об удовольствии, закрепленные дофаминовой системой для данной ситуации, автоматически активируют моторные нейроны, приводящие к сокращению мышц. Это если необходимо немедленное действие.
Искусственному обучению с подкреплением, как области знаний, необходимо решить обе эти задачи:
1. Подобрать архитектуру нейросети (что для нас уже сделала эволюция)
Хорошая новость в том, что высшие когнитивные функции, выполняющиеся в неокортексе у млекопитающих (и в полосатом теле у врановых), выполняются в примерно однородной структуре. Видимо, для этого не нужно какой-то жестко прописанной "архитектуры".
Разноплановость областей мозга, вероятно, объясняется чисто историческими причинами. Когда по мере эволюции новые части мозга нарастали поверх базовых, оставшихся от самых первых животных. По принципу работает — не трогай. С другой стороны, у разных людей одинаковые части мозга реагируют на одинаковые ситуации. Это может объясняться как ассоциативностью (features и "нейроны бабушки" естественным образом сформировались в этих местах в процессе обучения), так и физиологией. Что сигнальные пути, закодированные в генах, ведут именно к этим областям. Единого мнения тут нет, но можно почитать, например, эту недавнюю статью: "Biological and artificial intelligence".
2. Научиться обучать нейронные сети по принципам обучения с подкреплением
Именно этим, в основном, и занимается современный Reinforcement Learning. И какие успехи? Не очень.
Наивный подход
Казалось бы, обучать нейросеть с подкреплением очень просто: делаем случайные действия, и если получили награду, то считаем сделанные действия "эталонными". Ставим их на выход нейросети как стандартные labels и обучаем нейронную сеть методом обратного распространения ошибки, чтобы она выдавала именно такой выход. Ну, самое обычное обучение нейросети. А если действия привели к неудаче, то либо игнорируем этот случай, либо подавляем эти действия (ставим эталонными на выходе какие-нибудь другие, например любое другое случайное действие). В общем и целом, эта идея повторяет дофаминовую систему.
Но если вы попробуете так обучать любую нейронную сеть, неважно насколько сложной архитектуры, реккурентную, сверточную или обычную прямого распространения, то… Ничего не выйдет!
Почему? Неизвестно.
Считается, что полезный сигнал настолько мал, что теряется на фоне шума. Поэтому стандартным методом обратного распространения ошибки сеть не обучается. Награда случается очень редко, может один раз из сотен или даже тысяч шагов. А даже LSTM запоминает максимум 100-500 точек истории, и то лишь в очень простых задачах. А на более сложных если будет 10-20 точек истории, то уже хорошо.
Но корень проблемы именно в очень редких наградах (по крайней мере в задачах, представляющих практическую ценность). На данный момент мы не умеем обучать нейросети, которые запоминали бы единичные случаи. С чем мозг справляется с блеском. Можно что-то, случившееся всего один раз, запомнить на всю жизнь. И, кстати, большая часть обучения и работы интеллекта строится именно на таких случаях.
Это что-то вроде жуткого дисбаланса классов из области распознавания изображений. Способов бороться с этим просто нет. Лучшее, что пока смогли придумать — это просто подавать на вход сети наравне с новыми ситуациями, сохраненные в искусственном специальном буфере удачные ситуации из прошлого. То есть, постоянно обучать не только новым случаям, но и удачным старым. Естественно, нельзя бесконечно увеличивать такой буфер, да и непонятно что именно в нем хранить. Еще пытаются как-то на время фиксировать пути внутри нейросети, бывшие активными во время удачного случая, чтобы последующее обучение их не перезаписывало. Довольно близкая аналогия к происходящему в мозге, на мой взгляд, хотя особых успехов в этом направлении тоже пока не добились. Так как новые обученные задачи в своем расчете используют и результаты выхода нейронов из замороженных путей, то в итоге сигнал только по этим замороженным интерферирует с новыми, и старые задачи перестают работать. Есть еще один любопытный подход: обучать сеть новым примерам/задачам только в ортогональном направлении к предыдущим задачам (https://arxiv.org/abs/1810.01256). Это не перезаписывает предыдущий опыт, но резко ограничивает емкость сети.
Отдельным классом алгоритмов, призванных бороться с этой бедой (а заодно дарящих надежду достичь сильного ИИ), идут разработки в Meta-Learning. Это попытки обучить нейросеть сразу нескольким задачам. Не в смысле, что распознавать разные картинки в одной задаче, а именно разным задачам в разных доменах (каждый со своим распределением и ландшафтом решений). Скажем, распознавать картинки и одновременно ездить на велосипеде. Успехи пока тоже не очень, так как обычно все сводится к тому, чтобы заранее подготовить нейросеть с общими универсальными весами, а потом быстро, всего за несколько шагов градиентного спуска, доадаптировать их к конкретной задаче. Примеры алгоритмов метаобучения — MAML и Reptile.
В общем, только эта проблема (невозможность учиться на единичных удачных примерах) ставит крест на современном обучении с подкреплением. Вся мощь нейросетей перед этим печальным фактом пока бессильна.
Этот факт, что самый простой и очевидный способ не работает, заставил исследователей вернуться к классическому табличному Reinforcement Learning. Который как наука появился еще в седой древности, когда нейросети не были даже в проекте. Но теперь, вместо ручного подсчета значений в таблицах и в формулах, давайте в качестве целевых функций использовать такой мощный аппроксиматор, как нейронные сети! В этом вся суть современного Reinforcement Learning. И главное его отличие от обычного обучения нейросетей.
Q-learning и DQN
Reinforcement Learning (еще до нейросетей) зародился как довольно простая и оригинальная идея: давайте делать, опять же, случайные действия, а потом для каждой ячейки в таблице и каждого направления движения, посчитаем по специальной формуле (получившей название уравнение Беллмана, это слово вы будете встречать практически в каждой работе по обучению с подкреплением), насколько хороша эта ячейка и выбранное направление. Чем выше получится это число, тем с большей вероятностью этот путь ведет к победе.
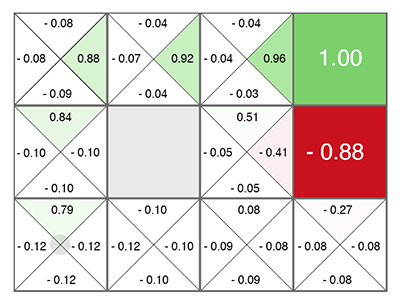
В какой ячейке вы бы ни появились, двигайтесь по нарастанию зеленого цвета! (в сторону максимального числа по бокам текущей ячейки).
Это число получило название Q (от слова quality — качество выбора, очевидно), а метод — Q-learning. Заменив формулу расчета этого числа на нейронную сеть, а точнее обучая нейронную сеть по этой формуле (плюс еще пара трюков, связанных чисто с математикой обучения нейросетей), в Deepmind получили метод DQN. Это который в 2015 году победил в куче Atari игр и положил начало революции в Deep Reinforcement Learning.
К сожалению, этот метод по своей архитектуре работает только с дискретными discrete действиями. В DQN на вход нейросети подается текущий state (текущая ситуация), а на выходе нейросеть предсказывает число Q. А так как на выходе сети перечислены сразу все возможные действия (каждый со своим предсказанным Q), то получается что нейросеть в DQN реализует классическую функцию Q(s,a) из Q-learning. Выдает Q для state и action (поэтому обозначение Q(s,a) как функции от s и a). Мы просто ищем обычным argmax по массиву среди выходов сети ячейку с максимальным числом Q и делаем действие, которое соответствует индексу этой ячейки.
Причем можно всегда выбирать действие с максимальным Q, тогда такая политика будет называться детерменистской. А можно выбирать действие как случайное из доступных, но пропорционально их Q-значениям (т.е. действия с высоким Q будут выбираться чаще, чем с низким). Такая политика называется стохастическая. У стохастического выбора плюс в том, что автоматически реализуется поиск и исследование мира (Exploration), так как каждый раз выбираются разные действия, иногда не кажущиеся самыми оптимальными, но могущие в будущем привести к большой награде. И тогда мы обучимся и повысим этим действиям вероятность, чтобы теперь они чаще выбирались согласно их вероятности.
Но что делать, если вариантов действий бесконечно? Если это не 5 кнопок на джойстике в Atari, а continuous момент управления двигателем робота? Конечно, момент в диапазоне -1..1 можно разбить на поддиапазоны по 0.1, и в каждый момент времени выбирать один из этих поддиапазонов, словно нажатие джойстика в Atari. Но не всегда нужное число можно дискретизировать на интервалы. Представьте, что вы едете на велосипеде по горному пику. И можете поворачивать руль только на 10 градусов влево или вправо. В какой-то момент пик может стать настолько узким, что повороты на 10 градусов в обоих направлению приведут к падению. Это принципиальная проблема дискретных действий. А еще DQN не работает с большим размерностями, и на роботе даже с 17 степенями свободы просто не сходится. Все хорошо, но есть маленький нюанс, как говорится.
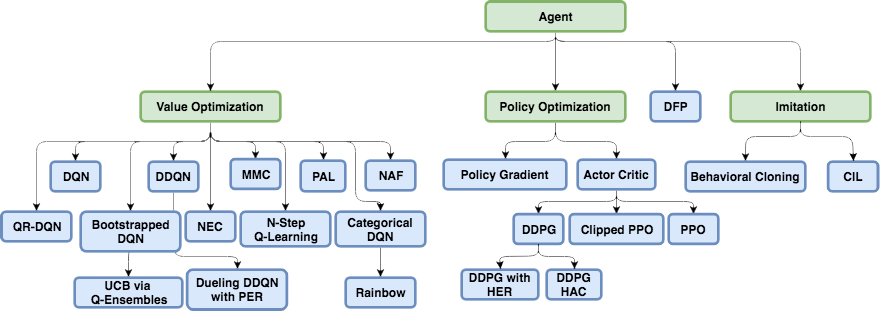
В дальнейшем было разработано много оригинальных и местами гениальных алгоритмов на основе DQN, позволивших, в том числе, работать с continuous действиями (за счет хитростей и введения дополнительных нейросетей): DDQN, DuDQN, BDQN, CDQN, NAF, Rainbow. Пожалуй, сюда можно также отнести Direct Future Prediction (DFP), который роднится с DQN архитектурой сети и дискретными действиями. Вместо предсказания числа Q для всех действий, DFP напрямую предсказывает сколько на следующем шаге будет здоровья или патронов, если выбрать это действие. Причем на один шаг вперед и на несколько шагов вперед. Нам остается лишь перебрать все выходы сети и найти максимальное значение интересующего нас параметра и выбрать соответствующее этому элементу массива действие, в зависимости от текущих приоритетов. Например, если мы ранены, то можем среди выходов сети искать действие, ведущее к максимальному увеличению здоровья.
Но что еще важнее, за последующее время были разработаны новые архитектуры специально для Reinforcement Learning.
Policy Gradient
Давайте на вход сети подавать текущий state, а на выходе сразу предсказывать действия (либо сами действия, либо распределение вероятностей для них в стохастической политике). Мы просто действуем, применяя actions, предсказанные нейросетью. А потом смотрим, какую награду R набрали за эпизод. Эта награда может быть либо выше начальной (когда выиграли в игре), либо ниже (проиграли в игре). Также можно награду сравнивать со некоей средней наградой. Выше она средней или ниже.
Собственно, динамику полученной награды R в результате действий, которые подсказала нейросеть, можно использовать для вычисления градиента по специальной формуле. И применить этот градиент к весам нейросети! И дальше использовать обычное обратное распространение ошибки. Просто вместо "эталонных" действий на выходе сети в качестве labels (мы ведь не знаем какие они должны быть), используем изменение награды для расчета градиента. По этому градиенту сеть обучится, чтобы предсказывать действия, которые ведут к увеличению награды R.
Это классический Policy Gradient. Но у него есть недостаток — надо ждать окончания эпизода, чтобы посчитать куммулятивную награду R, прежде чем изменять веса сети согласно ее изменению. А из преимуществ — гибкая система поощрений и наказаний, которая не только работает в обе стороны, но также зависит от величины награды. Большая награда сильнее поощряет действия, которые к ней привели.
Actor-critic, DDPG
А теперь представьте, что у нас есть две сети — одна предсказывает какие действия надо совершить, а вторая оценивает насколько эти действия хороши. То есть, выдает Q-число для этих действий, как в алгоритме DQN. На вход первой сети подается state, а она предсказывает action(s). Вторая сеть на вход тоже получает state, но еще и действия action, предсказанные первой сетью, а на выходе выдает число Q как функцию от них обоих: Q(s,a).
Собственно, это число Q(s,a), выданное второй сетью (ее называют critic, критик), точно также можно использовать для вычисления градиента, которым обновлять веса первой сети (которую называют актером, actor), как мы делали выше с наградой R. Ну а вторая сеть обновляется обычным путем, согласно реальному прохождению эпизода. Этот метод получил название actor-critic. Его плюс по сравнению с классическим Policy Gradient, что веса сети можно обновлять на каждом шаге, не дожидаясь окончания эпизода. Что ускоряет обучение.
В таком виде это сеть DDPG. Так как она предсказывает напрямую действия actions, то прекрасно работает с continuous действиями. DDPG является прямым continuous конкурентом DQN с его дискретными действиями.

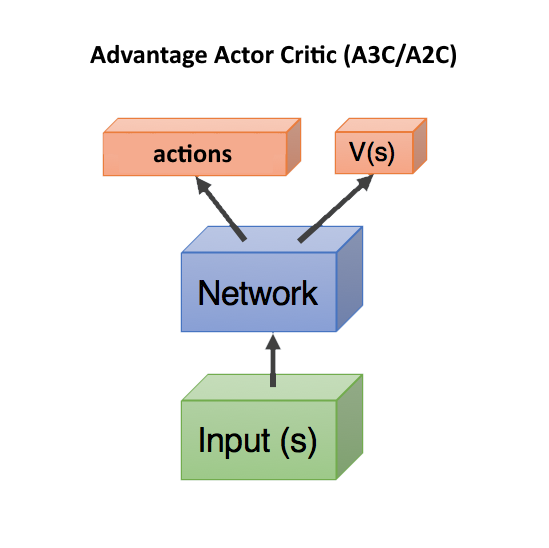
Advantage Actor Critic (A3C/A2C)
Следующим шагом стало использование для обучения первой сети не просто предсказания критиком critic числа Q(s,a) — насколько хороши действия, предсказанные актером actor, как это было в DDPG. А насколько эти предсказанные действия оказались лучше или хуже, чем мы ожидали.
Это очень близко к тому, что происходит в биологическом мозге. Из экспериментов известно, что максимальный выброс дофамина происходит не во время самого получения удовольствия, а во время ожидания, что скоро получим удовольствие. Впрочем, если ожидания не оправдались, то наступают ужасные последствия, большие чем в обычном случае (в организме присутствует специальная система наказания, обратная системе вознаграждения).
Для этого для расчета градиентов стали использовать не число Q(s,a), а так называемое Advantage: A(s,a) = Q(s,a) — V(s). Число A(s,a) показывает не абсолютное качество Q(s,a) выбранных действий, а относительное преимущество — насколько после предпринятых действий станет лучше, чем текущая ситуация V(s). Если A(s,a) > 0, то градиент будет изменять веса нейросети, поощряя предсказанные сетью действия. Если A(s,a) < 0, то градиент будет изменять веса так, что предсказанные действия будут подавляться, т.к. они оказались плохие.
В этой формуле V(s) показывает насколько хорош текущий state сам по себе, без привязки к действиям (поэтому зависит только от s, без a). Если мы стоим в шаге от вершины Эвереста — это очень хорошая ситуация state, с большим V(s). А если мы уже сорвались и падаем, то это офигеть какой плохой state, с низким V(s).
К счастью, при таком подходе Q(s,a) можно заменить на награду r, которую получим после совершения действия, и тогда формула преимущества для расчета градиентов получается A = r — V(s).
В таком случае, достаточно предсказывать только V(s) (а награду мы посмотрим уже по факту что получится в реальности), и две сети — actor и critic, можно объединить в одну! Которая получает на вход state, а на выходе разделяется на две головы head: одна предсказывает действия actions, а другая предсказывает V(s). Такое объединение помогает лучше переиcпользовать веса, т.к. обе сети должны на входе получать state. Впрочем, можно использовать и две отдельные сети.
Учет и предсказание сетью качества текущей ситуации V(s) в любом случае помогает ускорить обучение. Так как при плохом V(s), где уже ничего нельзя исправить ни при каких действиях action (мы летим вниз головой с Эвереста), можно не искать дальше пути решения. Это используется в Dueling Q-Network (DuDQN), где Q(s,a) внутри сети специально раскладывается на Q(s,a) = V(s) + A(a), а потом собирается обратно.
Asynchronous Advantage Actor Critic (A3C) означает всего лишь, что есть сервер, собирающий результаты от множества actor. И обновляющий веса как только набирается батч batch нужного размера. Поэтому асинхронный, что не ждет каждого actor. Это вроде как разбавляет примеры, убирая из них ненужную корреляцию, что улучшает обучение. С другой стороны, потом появился A2C — синхронная версия A3C, в которой сервер дожидается окончания эпизодов у всех actor и только после этого обновляет веса (поэтому синхронный). A2C тоже показывает хорошие результаты, поэтому применяются обе версии, в зависимости от вкуса разработчика.
TRPO, PPO, SAC
Собственно, на этом прогресс закончился.
Не смотря на красивое и выглядящее логичным описание, все это работает не очень. Даже лучшие Reinforcement Learning алгоритмы требуют десятки миллионов примеров, сравнимы по эффективности со случайным поиском, а самое печальное, что не позволяет с их помощью создать сильный ИИ — работают лишь на крайне низких размерностях, исчисляемых единицами. Даже не десятками.
Дальнейшее улучшение — TRPO и PPO, являющиеся сейчас state-of-the-art, являются разновидностью Actor-Critic. На PPO в настоящее время обучают большинство агентов в мире RL. К примеру, им обучали OpenAI Five для игры в Dota 2.
Вы будете смеяться, но все что придумали в методах TRPO и PPO — это ограничивать изменение нейронной сети при каждом обновлении, чтобы веса резко не менялись. Дело в том, что в A3C/A2C бывают резкие изменения, которые портят предыдущий опыт. Если сделать, чтобы новая policy не слишком отличалась от предыдущей, то можно избежать таких выбросов. Что-то вроде gradient clipping в рекуррентных сетях для защиты от взрывающихся градиентов, только на другом математическом аппарате. Сам факт того, что приходится так грубо обрезать и ухудшать обучение (большие градиенты там ведь не просто так появились, они нужны для вызвавшего их примера), и что это дает положительный эффект, говорит о том, что мы свернули куда-то не туда.
В последнее время возрастающей популярность пользуется алгоритм Soft-Actor-Critic (SAC). Он не сильно отличается от PPO, только добавлена цель при обучении повышать энтропию в policy. Делать поведение агента более случайным. Нет, не так. Чтобы агент был способен действовать в более случайных ситуациях. Это автоматически повышает надежность политики, раз агент готов к любым случайным ситуациям. Кроме того, SAC требует немного меньше примеров для обучения, чем PPO, и менее чувствителен к настройке гиперпараметров, что тоже плюс. Однако даже с SAC, чтобы обучить бегать гуманоида с 17 степенями свободы, начиная с позиции стоя, нужно около 20 млн кадров и примерно сутки расчета на одном GPU. Более сложные начальные условия, скажем, научить вставать гуманоида из произвольной позы, может вообще не обучиться.
Итого, общая рекомендация в современном Reinforcement Learning: использовать SAC, PPO, DDPG, DQN (в таком порядке, по убыванию).
Model-Based
Существует еще один интересный подход, косвенно касающийся обучения с подкреплением. Это построить модель окружающей среды, и использовать ее для прогнозирования, что произойдет если мы предпримем какие-то действия.
Его недостатком является то, что он никак не говорит, какие действия нужно предпринять. Лишь об их результате. Но зато такую нейронную сеть легко обучать — просто обучаем на любой статистике. Получается что-то вроде симулятора мира на основе нейронной сети.
После этого генерируем огромное количество случайных действий, и каждое прогоняем через этот симулятор (через нейронную сеть). И смотрим, какое из них принесет максимальную награду. Есть небольшая оптимизация — генерировать не просто случайные действия, а отклоняющиеся по нормальном закону от текущей траектории. И действительно, если мы поднимаем руку, то с большой вероятностью нужно продолжать ее поднимать. Поэтому в первую очередь нужно проверить минимальные отклонения от текущей траектории.
Здесь фокус с том, что даже примитивный физический симулятор вроде MuJoCo или pyBullet выдает около 200 FPS. А если обучить нейронную сеть прогнозировать вперед хотя бы на несколько шагов, то для простых окружений легко можно за один раз получать батчи по 2000-5000 предсказаний. В зависимости от мощности GPU, в секунду можно получить прогноз для десятков тысяч случайных действий благодаря параллелизации в GPU и сжатости вычислений в нейросети. Нейросеть здесь просто выполняет роль очень быстрого симулятора реальности.
Кроме того, раз уж нейросеть может прогнозировать реальный мир (это и есть model-based подход, в общем смысле), то можно проводить обучение целиком в воображении, так сказать. Эта концепция в Reinforcement Learning получила название Dream Worlds, или World Models. Это неплохо работает, хорошее описание есть тут: https://worldmodels.github.io. Кроме того, это имеет природный аналог — обычные сны. И многократная прокрутка недавних или планируемых событий в голове.
Imitation Learning
От бессилия, что алгоритмы Reinforcement Learning не работают на больших размерностях и сложных задачах, народ задался целью хотя бы повторить действия за экспертами в виде людей. Здесь удалось достичь неплохих результатов (недостижимых обычным Reinforcement Learning). Так, OpenAI получилось пройти игру Montezuma's Revenge. Фокус оказался прост — помещать агента сразу в конец игры (в конец показанной человеком траектории). Там с помощью PPO, благодаря близости финальной награды, агент быстро учится идти вдоль траектории. После этого помещаем его немного назад, где он быстро учится доходить до того места, которое он уже изучил. И так постепенно сдвигая точку "респавна" вдоль траектории до самого начала игры, агент учится проходить/имитировать траекторию эксперта в течении всей игры.
Другой впечатляющий результат — повторение движений за людьми, снятые на Motion Capture: DeepMimic. Рецепт аналогичен методу OpenAI: каждый эпизод начинаем не с начала траектории, а со случайной точки вдоль траектории. Тогда PPO успешно изучает окрестности этой точки.
Надо сказать, что нашумевший алгоритм Go-Explore от Uber, прошедший с рекордными очками игру Montezuma's Revenge, вообще не является алгоритмом Reinforcement Learning. Это обычный случайный поиск, но начиная со случайной посещенной ранее ячейки cell (огрубленной ячейки, в которую попадают несколько state). И только когда таким случайным поиском будет найдена траектория до конца игры, уже по ней с помощью Imitation Learning обучается нейросеть. Способом, аналогичным как в OpenAI, т.е. начиная с конца траектории.
Curiosity (любопытство)
Очень важным понятием в Reinforcement Learning является любопытство (Curiosity). В природе оно является двигателем для исследования окружающей среды.
Проблема в том, что в качестве оценки любопытства нельзя использовать простую ошибку предсказания сети, что будет дальше. Иначе такая сеть зависнет перед первым же деревом с качающейся листвой. Или перед телевизором со случайным переключением каналов. Так как результат из-за сложности будет невозможно предсказать и ошибка всегда будет большой. Впрочем, именно это и является причиной, почему мы (люди) так любим смотреть на листву, воду и огонь. И на то, как другие люди работают =). Но у нас есть защитные механизмы, чтобы не зависнуть навечно.
Один из таких механизмов придумали как Inverse Model в работе Curiosity-driven Exploration by
Self-supervised Prediction. Если коротко, агент (нейронная сеть) кроме того, что предсказывает какие действия лучше всего совершить в данной ситуации, дополнительно пытается предсказать что будет с миром после совершенных действий. И использует это свое предсказание мира для следующего шага, чтобы по нему и по текущему шагу обратно предсказать свои же предпринятые ранее действия (да, сложно, без поллитра не разобраться).
Это приводит к любопытному эффекту: агент становится любопытным только к тому, на что он может повлиять своими действиями. На качающиеся ветки дерева он никак не может повлиять, поэтому они становятся ему неинтересны. А вот походить по округе он может, поэтому ему любопытно ходить и исследовать мир.
Однако если у агента будет пульт от телевизора, переключающий случайные каналы, то он может на него повлиять! И ему будет любопытно щелкать каналы до бесконечности (так как не может предсказать, какой будет следующий канал, т.к. он случайный). Попытка обойти эту проблему предпринята в Google в работе Episodic Curiosity through Reachability.
Но, пожалуй, лучший state-of-the-art результат по любопытству, на данный момент принадлежит OpenAI с идеей Random Network Distillation (RND). Ее суть в том, что берется вторая, совершенно случайно инициализированная сеть, и ей на вход подается текущий state. А наша основная рабочая нейросеть пытается угадать выход этой нейросети. Вторая сеть не обучается, она остается все время фиксированной как была инициализирована.
В чем смысл? Смысл в том, что если какой-либо state уже был посещен и изучен нашей рабочей сетью, то она более менее успешно сможет предсказывать выход той второй сети. А если это новый state, где мы никогда не были, то наша нейросеть не сможет предсказать выход той RND сети. Эта ошибка в предсказании выхода той случайно инициализированной сети используется как показатель любопытства (дает высокие награды, если в данной ситуации не можем предсказать ее выход).
Почему это работает, не совсем понятно. Но пишут, что это устраняет проблему когда цель предсказания стохастическая и когда недостаточно данных, чтобы самому сделать предсказание что будет дальше (что дает большую ошибку предсказания в обычных алгоритмах любопытства). Так или иначе, но RND реально показал отличные результаты по исследованию на основе любопытства в играх. И справляется с проблемой случайного телевизора.
С помощью RND любопытства в OpenAI впервые честно (а не через предварительный случайный поиск, как в Uber) прошли первый уровень Montezuma's Revenge. Не каждый раз и ненадежно, но время от времени получается.

Что в итоге?
Как видите, всего за несколько лет Reinforcement Learning прошел долгий путь. Не просто несколько удачных решений, как в сверточных сетях, где resudal и skip connections позволили тренировать сети глубиной в сотни слоев, вместо десятка слоев с одной только функцией активации Relu, поборовшей проблему исчезающих градиентов в сигмоиде и tanh. В обучении с подкреплением произошел прогресс в концепциях и понимании причин, почему не заработал тот или иной наивный вариант реализации. Ключевое слово "не заработал".
Но с технической стороны все по прежнему упирается в предсказания все тех же Q, V или A значений. Ни временных зависимостей на разных масштабах, как в мозге (Hierarchical Reinforcement Learning не в счет, уж больно примитивная в нем иерархия по сравнению с ассоциативностью в живом мозге). Ни попыток придумать архитектуру сети, заточенную именно под обучение с подкреплением, как это произошло с LSTM и другими рекуррентными сетями для временных последовательностей. Reinforcement Learning либо топчется на месте, радуясь небольшим успехам, либо движется в каком-то совсем уж неправильном направлении.
Хочется верить, что однажды в обучении с подкреплением произойдет прорыв в архитектуре нейронных сетей, аналогичный тому что произошел в сверточных сетях. И мы увидим по-настоящему работающее обучение с подкреплением. Обучающееся на единичных примерах, с работающей ассоциативной памятью и работающее на разных временных масштабах.

