 Вертолет «Индженьюити» выполняет пятый полет, в котором он значительно отдалился от марсохода. Фото с бортовой камеры марсохода
Вертолет «Индженьюити» выполняет пятый полет, в котором он значительно отдалился от марсохода. Фото с бортовой камеры марсоходаСпециалисты лаборатории реактивного движения NASA (Jet Propulsion Laboratory, JPL) сообщили, что 7 мая марсианский вертолет «Индженьюити» успешно выполнил свой пятый полет и впервые перебазировался на новое место. Предыдущие четыре полета проходили с возвратом и посадкой на одно и тоже место, где вертолет отделился от марсохода 4 апреля. Новое место посадки «Индженьюити» нашел сам во время четвертого разведывательного полета.
 «Индженьюити» готовится к пятой полетной миссии. Фото с бортовой камеры марсохода 6 мая.
«Индженьюити» готовится к пятой полетной миссии. Фото с бортовой камеры марсохода 6 мая. «Индженьюити» перебазировался на новое место, где рядом много больших камней. Фото с бортовой камеры марсохода 7 мая.
«Индженьюити» перебазировался на новое место, где рядом много больших камней. Фото с бортовой камеры марсохода 7 мая.Пятый полет длился 108 секунд, за которые вертолет пролетел 129 метров на высоте 5 метров, потом он завис над новым местом посадки и поднялся еще на 5 метров вверх. Впервые вертолет достиг высоты 10 метров на Марсе. С этой высшей точки «Индженьюити» сделал несколько цветных фотографий местности.
Новое место посадки вертолета находится в 129 метрах на юг от первой базы «Индженьюити». Вертолет навсегда покинул свою первую взлетную площадку «Поле братьев Райт» и улетел открывать новые виды Марса совместно с марсоходом, на котором установлена базовая станция для связи с вертолетом.

Новый марсианский аэродром «Индженьюити» снизу на фото. Картинка получена с бортовой камеры вертолета во время четвертого полета.
Специалисты JPL получили подтверждение успешного выполнения пятого полета.
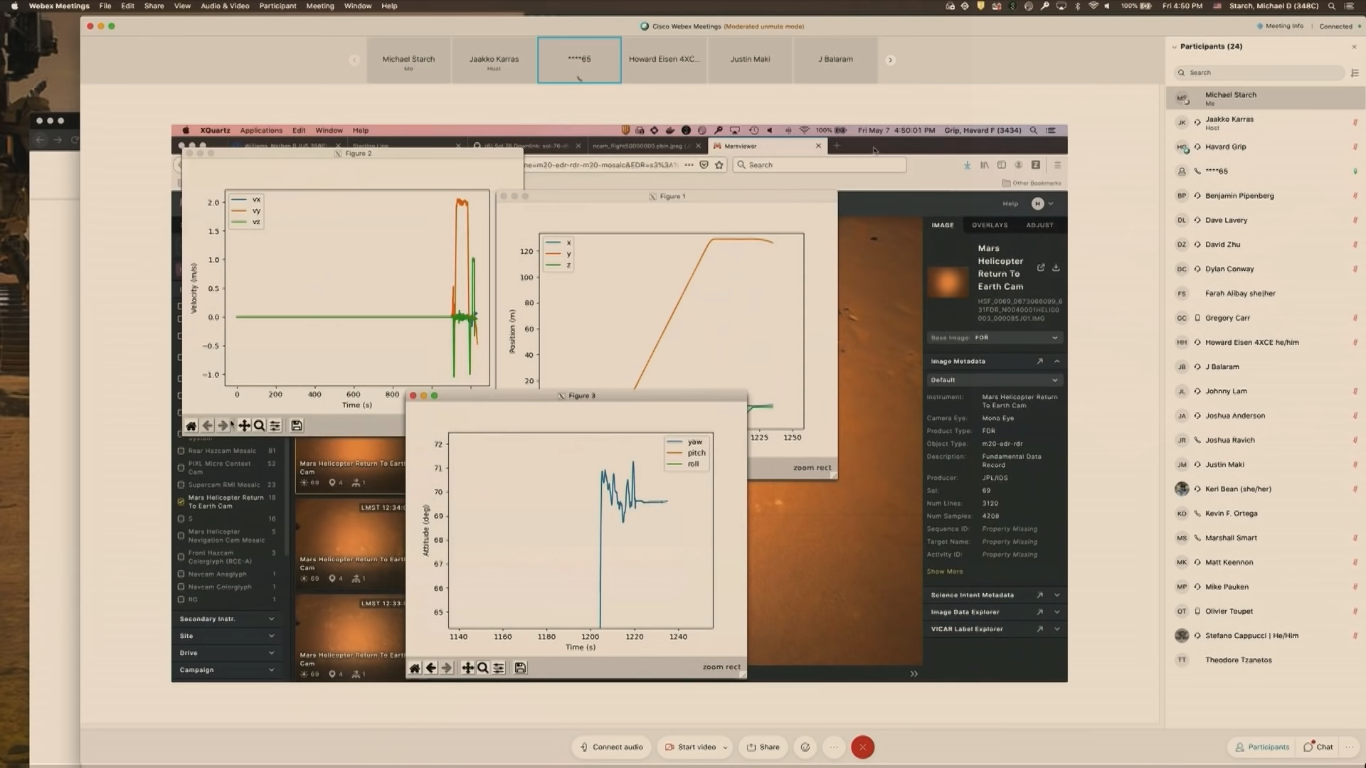 Телеметрия пятого полета.
Телеметрия пятого полета. «Индженьюити» сделал несколько десятков кадров цветной бортовой камерой во время пятого полета.
«Индженьюити» сделал несколько десятков кадров цветной бортовой камерой во время пятого полета.
Траектория четвертого полета «Индженьюити» (направление вниз) наложена на рельеф местности, полученный камерой HiRISE с борта марсианского разведывательного орбитального аппарата MRO (Mars Reconnaissance Orbiter).
Видео с навигационной камеры «Индженьюити» во время четвертого полета на высоте 5 метров.
НАСА рассказало, что продлило миссию «Индженьюити» в демонстрационно-разведовательном режиме до конца августа. Марсоход уже направился на 1-2 км на юг, а вертолет будет следовать за ним в медленном темпе — 1 полет в 2 недели, чтобы не отвлекать команду марсохода от научных исследований. В это время марсоход будет совершать небольшие поездки, а вертолет сможет выполнять полеты, садясь рядом с текущим местоположением марсохода или его следующей предполагаемой стоянкой.
Фактически «Индженьюити» на Марсе уже реализовал такие достижения:
- 76 солов (марсианские сутки) на Марсе, 34 сола на поверхности планеты автономно, вертолет был рассчитан на 30 суток работы в условиях Марса, сейчас его миссию НАСА продлила до конца августа;
- температура за бортом во время полетов вертолета была от -21°C до -26°C, а по ночам достигала -90°C;
- первый самостоятельный отрыв от поверхности (всего выполнено пять взлетов);
- первый автономный полет без управления или прерывания со стороны оператора с Земли;
- первая посадка БПЛА на Марсе (всего выполнено пять посадок);
- вертолет задействовал в миссиях 2 посадочные площадки на Марсе;
- достиг высоты 10 метров (начинал с 3 метров, а потом поднялся на 5 метров) над поверхностью;
- двигался с максимальной скоростью до 3,5 метров в секунду;
- сделал аэрофотосъемку поверхности и сфотографировал марсоход;
- совершил стабильное парение;
- выполнил элементы бокового полета;
- пролетел за все полеты 499 метров над поверхностью Марса;
- прислал с помощью микрофона марсохода звуки своего полета;
- провел в режиме полета в атмосфере планеты 396 секунд.
Стоимость этого научного проекта составила $80 млн.
НАСА рассказало об ограничениях в механизме подвески вертолета. Он рассчитан всего на несколько сотен посадок. Четыре опоры «Индженьюити» обеспечивают устойчивость и вертикальное положение вертолета, даже когда он не летает. Любое опрокидывание аппарата почти наверняка приведет к повреждению лопастей и невозможности полета. Часто задаваемый вопрос, особенно для тех, кто смотрел фильм «Марсианин», заключается в том, не унесет ли изобретательность сильные марсианские ветры или выбросит в воздух один из пылевых дьяволов, которые обычно проходят через эту местность. Благодаря тонкой атмосфере (1% земной), широкой стойке шасси (угол опрокидывания 45°) и низкому центру тяжести (40% массы вертолета приходится на фюзеляж), припаркованный вертолет может легко противостоять ветру со скоростью более 217 км в час, что намного превышает то, что НАСА ожидает встретить на Марсе.
Также вертолет не совершает плавную посадку из-за небольшого ветра, а практически падает с высоты 1 метр, чтобы зафиксироваться на поверхности. Чтобы выдержать такие жесткие приземления «Индженьюити» оснащен мягкой системой подвески, как показано на рисунке ниже.

Обратите внимание на отличительную открытую структуру кольца в каждом из четырех мест крепления посадочных опор к фюзеляжу. Нижняя половина этого кольца представляет собой титановую пружину, которая может изгибаться на 17 градусов для обеспечения движения подвески на 9 см, в то время как верхняя половина представляет собой изгиб из мягкого нелегированного алюминия, который служит демпфером или амортизатором. Пластически деформируясь и сжимаясь при поглощении энергии, этот изгиб действует так же, как структура зоны деформации шасси автомобиля. Однако, в отличие от автомобиля или смятого шасси лунных посадочных устройств миссии Аполлон, титановые пружины «Индженьюити» отскакивают после каждого удара, чтобы вернуть эти алюминиевые амортизаторы в форму для следующей посадки. Алюминиевый демпфер становится немного слабее с каждым циклом, так как на нем появляются трещины и складки. На земле в лаборатории он сломался после нескольких сотен жестких посадок, а для этой миссии было запланировано всего несколько полетов, так что этот предел не должен быть достигнут.
19 апреля «Индженьюити» совершил первый автономный полет. Видео первого полета «Индженьюити», сделанное марсоходом.
20 апреля НАСА показало на видео потоки марсианской пыли во время первого полета вертолета «Индженьюити».
21 апреля НАСА опубликовало подробное видео первого взлета и посадки вертолета «Индженьюити».
22 апреля 2021 года «Индженьюити» выполнил свой второй полет. Позже НАСА показало первые цветные изображения, полученные с вертолета «Индженьюити».
25 апреля 2021 года «Индженьюити» совершил третий 100-метровый полет и сфотографировал марсоход «Персеверанс».
30 апреля вертолет со второй попытки выполнил четвертый полет. Тогда же оператор вертолета Ховард Грип рассказал о фазах полета над поверхностью Марса во время его четырех миссий — взлете, парении и посадке.
7 мая НАСА опубликовало видео со звуком четвертого полета «Индженьюити».

