 Вертолет «Индженьюити» на взлетной площадке перед четвертым полетом. 68 суток на Марсе, 26 суток на поверхности планеты автономно. Источник фото: бортовая камера марсохода «Персеверанс».
Вертолет «Индженьюити» на взлетной площадке перед четвертым полетом. 68 суток на Марсе, 26 суток на поверхности планеты автономно. Источник фото: бортовая камера марсохода «Персеверанс».30 апреля 2021 года специалисты лаборатории реактивного движения NASA (Jet Propulsion Laboratory, JPL) рассказали, что первая попытка взлета вертолета «Индженьюити» для выполнения четвертого полета закончилась неудачно. Марсианский аппарат не перешел в режим полета из-за истечения сторожевого таймера (“watchdog” timer expiration) и досрочно прекратил выполнение заранее загруженной в него программы. Сутками позже со второй попытки вертолет отправился в четвертый полет.
НАСА подтвердило, что вертолет находится в рабочем состоянии, а этот инцидент не вывел из строя его элементы и не повлиял на работоспособность.
Специалисты JPL уточнили, что им известна эта проблема. Данные предыдущих трех полетов и анализ текущего ПО управления полетом мультикоптера показали, что каждый раз, когда вертолет пытается взлететь, то с вероятностью 15 % происходит истечение времени сторожевого таймера и прекращение текущего выполнения полетных команд. Ранее такая ситуация возникла во время тестов перед первым полетом. После этого НАСА изменило часть полетного ПО. Далее три полета прошли штатно без этой ошибки, а четвертый полет 29 апреля был снова прерван на стадии попытки взлета.
Аппаратный сторожевой таймер контролирует последовательность выполнения команд и предупреждает систему о любых потенциальных проблемах. В данном случае он помог системе вертолета оставаться в безопасности, не дал продолжить работать в нештатном режиме и предотвратил поломку устройства. Причем аппаратные системы «Индженьюити» основаны на плате SoC Snapdragon 801, а в качестве операционной системы используется открытое ПО и Linux.
НАСА пояснило, что команда «Индженьюити» уже выполнила и даже превзошла все поставленные перед ней тестовые задачи и теперь может расширить ранее установленные границы использования вертолета и увеличить производительность его полета.
Специалисты JPL попытаются еще раз запустить вертолет 30 апреля. Четвертый полет уже будет экстремальным для вертолета и выходить за пределы его расчетных возможностей. Он начнется с высоты 5 метров, вертолет направится на юг, пролетая над камнями, песчаными волнами и небольшими ударными кратерами до высоты 84 метра. Во время полета «Индженьюити» будет использовать свою направленную вниз навигационную камеру для сбора изображений поверхности через каждые 1,2 метра до тех пор, пока он не пролетит в общей сложности 133 метра. Затем зависнет, сделает снимки с помощью своей цветной камеры и отправится обратно на взлетную площадку под названием «Поле братьев Райт». Четвертый полет будет длиться 117 секунд, с максимальной скоростью полета до 3,5 м/с, а дальность планируется около 266 метров.
Вечером 30 апреля НАСА сообщило, что «Индженьюити» успешно выполнил четвертый полет.
 «Индженьюити» улетел от марсохода во время четвертого полета.
«Индженьюити» улетел от марсохода во время четвертого полета.Во время четвертого полета «Индженьюити» также выполнил разведку нового места для посадочной площадки, чтобы перебазироваться туда во время пятого полета. В мае, после пятого полета, вертолет будет переведен в «демонстрационный режим», чтобы в автоматическом состоянии 30-60 солов работать с марсоходом в паре в роли воздушного скаута-разведчика. Это будет его новая миссия.
НАСА рассказало, что планирует продлить миссию «Индженьюити» до конца августа. Марсоход скоро направится на 1-2 км на юг, а вертолет будет следовать за ним в медленном темпе — 1 полет в 2 недели, чтобы не отвлекать команду марсохода от научных исследований. В это время марсоход будет совершать небольшие поездки, а вертолет сможет выполнять полеты, садясь рядом с текущим местоположением марсохода или его следующей предполагаемой стоянкой.
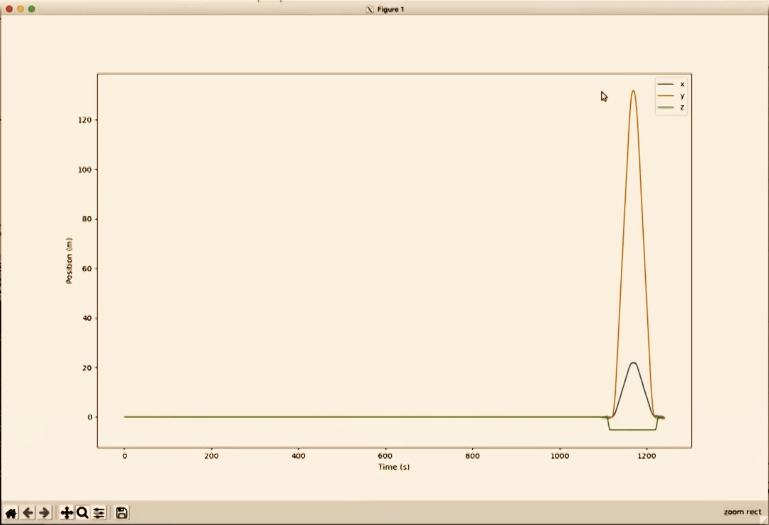 Телеметрия четвертого полета.
Телеметрия четвертого полета.
Ролик с тенью вертолета, которая видна с помощью его навигационной камеры во время третьего полета.
 Телеметрия второго полета «Индженьюити».
Телеметрия второго полета «Индженьюити». Отработка автономной системы ориентации вертолета.
Отработка автономной системы ориентации вертолета. Зона полета вертолета и траектория движения марсохода.
Зона полета вертолета и траектория движения марсохода.Фактически «Индженьюити» на Марсе уже реализовал такие достижения:
- первый самостоятельный отрыв от поверхности (всего выполнено четыре взлета);
- первый автономный полет без управления или прерывания со стороны оператора с Земли;
- первая посадка БПЛА на Марсе (всего выполнено четыре посадки);
- достиг высоты более 5 метров над поверхностью;
- двигался с максимальной скоростью до 3,5 метров в секунду;
- сделал аэрофотосъемку поверхности и сфотографировал марсоход;
- совершил стабильное парение;
- выполнил элементы бокового полета;
- пролетел за все полеты 370 метров над поверхностью Марса;
- провел в режиме полета в атмосфере планеты 288 секунд.
Стоимость этого научного проекта составила $80 млн.
19 апреля 2021 года марсианский вертолет «Индженьюити» успешно совершил свой первый тестовый автономный полет. Видео первого тестового полета марсианского вертолета «Индженьюити», сделанное марсоходом.
20 апреля НАСА показало на видео потоки марсианской пыли во время первого полета вертолета «Индженьюити».
21 апреля НАСА опубликовало подробное видео первого взлета и посадки вертолета «Индженьюити».
22 апреля 2021 года «Индженьюити» выполнил свой второй полет. Позже НАСА показало первые цветные изображения, полученные с вертолета «Индженьюити».
25 апреля 2021 года «Индженьюити» совершил третий 100-метровый полет и сфотографировал марсоход «Персеверанс».
