Привет! Меня зовут Роман Федоренко, я доцент Центра компетенций НТИ по направлению «Технологии компонентов робототехники и мехатроники» на базе Университета Иннополис. Я работаю с командой робототехников, которая специализируется на беспилотных летательных аппаратах. По большей части мы занимаемся «высокоуровневым» управлением БПЛА: планирование движения, обход препятствий, решения для киносъёмки и сканирования местности. Хотя собственные небольшие коптеры тоже собирали и с «железом» работали. В прошлом году мы начали разработку большого самолёта вертикального взлёта и посадки, который включает все уровни — от изготовления носителя до обвески датчиками и интеллектуального управления. И при разработке этого проекта познакомились с
UAVCAN.
UAVCAN — это открытый лёгкий протокол для бортовой сети подвижных объектов. Недавно его разработчик и мейнтейнер Павел Кириенко
Spym рассказал о протоколе на
PX4 Developer Summit, крупной конференции сообщества разработчиков дронов с использованием open-source экосистемы вокруг автопилота
PX4, частью которой является UAVCAN. А ещё Павел подготовил
подробную статью для русскоязычного сообщества на Хабре по следам своего доклада.
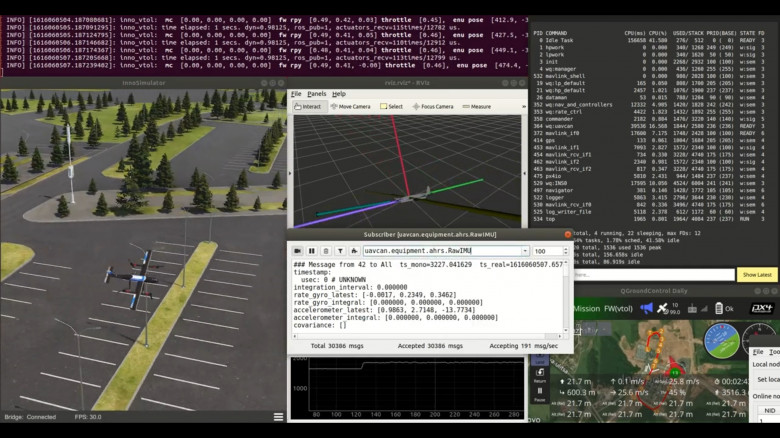
В этом материале я расскажу о практической стороне использования протокола с позиции разработчиков систем автоматического управления для БПЛА: как мы выбрали UAVCAN, что делаем с помощью него и какие возможности видим в будущем.